Clear Sky Science · pl
Konkretny plan ruchu dla wielu agentów umożliwiający kinodynamicznie agresywne manewry
Roboty, które potrafią tańczyć w ruchu
Wyobraź sobie dziesiątki latających i jeżdżących robotów pędzących po magazynie, nigdy się nie zderzających i wykonujących zadania szybciej niż poradziliby sobie ludzie. W artykule opisano nowy sposób „choreografii” takiego robotycznego „ruchu”, pozwalający wielu maszynom poruszać się agresywnie i szybko w ciasnych przestrzeniach, zachowując przy tym bezpieczeństwo. Praca ma znaczenie, ponieważ te same pomysły mogą pewnego dnia napędzać floty robotów w fabrykach, magazynach i usługach dostaw, które muszą działać bez przerwy w naszym codziennym świecie.
Dlaczego zapanowanie nad wieloma robotami jest tak trudne
Koordynacja tłumu robotów jest znacznie trudniejsza niż sterowanie jednym urządzeniem. Każdy robot musi dotrzeć z punktu początkowego do celu, nie rozbijając się, nie blokując innych i nie utknąć w nieskończonych pętlach. Obecne podejścia zwykle znajdują się na dwóch skrajnościach. Niektóre metody traktują roboty jak pionki na siatce, co sprawia, że planowanie dla setek jednostek jest szybkie i matematycznie uporządkowane — ale uzyskane trasy często ignorują to, jak prawdziwe maszyny się poruszają, przyspieszają czy skręcają. Inne metody symulują pełny ruch fizyczny i generują gładkie, eleganckie trajektorie, lecz stają się bolesnie wolne lub zawodzą, gdy liczba robotów rośnie ponad kilka sztuk.
Ścieżka pośrednia: „konkretne” planowanie
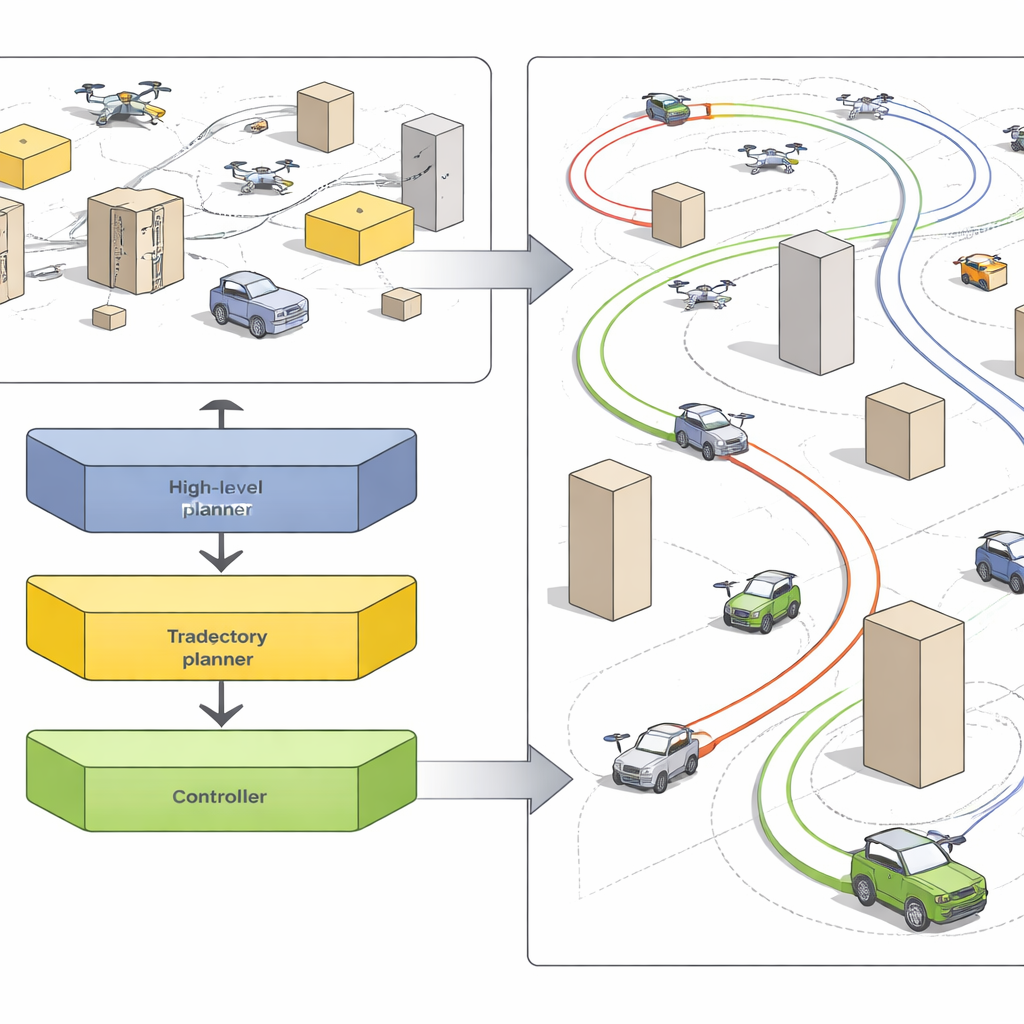
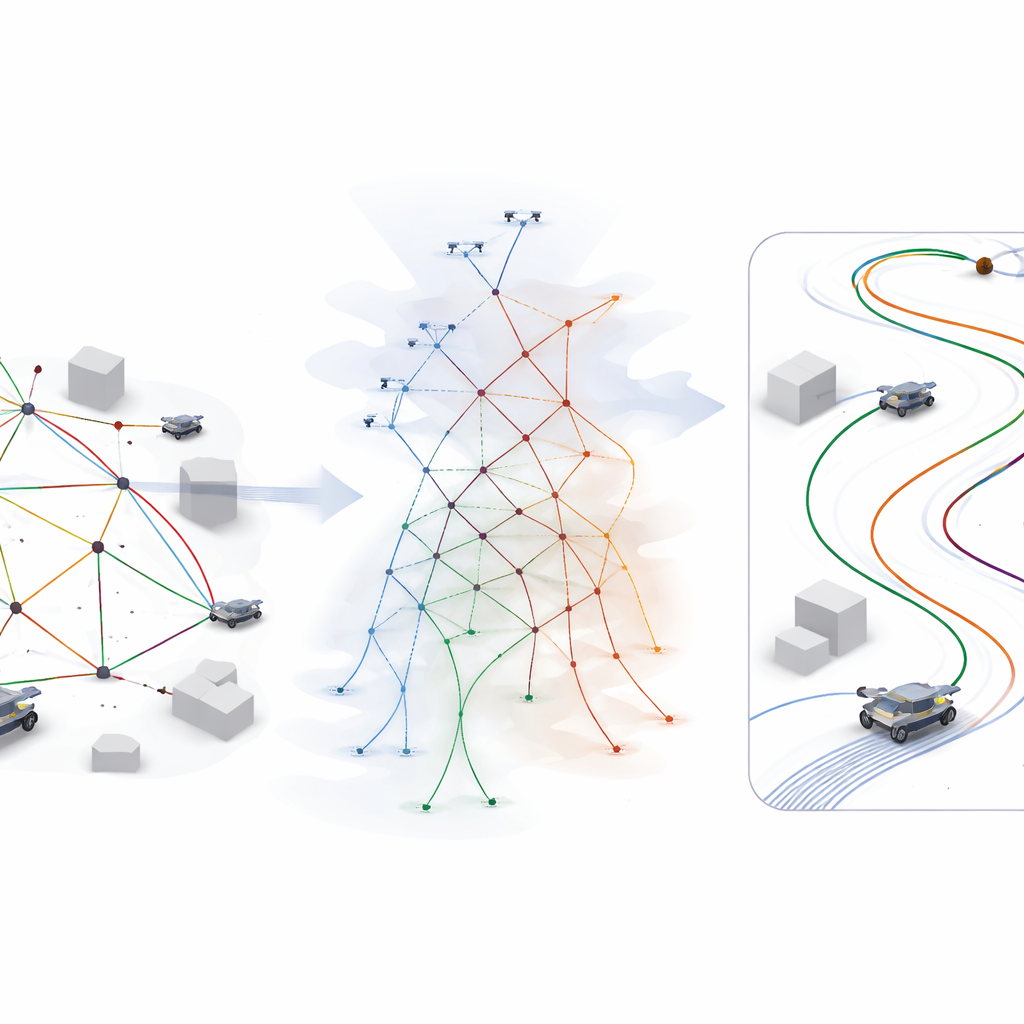
Autorzy proponują hybrydową strategię, którą nazywają „konkretnym” planowaniem ruchu dla wielu agentów. Pomysł polega na połączeniu przejrzystej struktury planowania siatkowego z realistycznym obrazem tego, jak roboty faktycznie się poruszają. Zamiast działać wyłącznie w abstrakcyjnej siatce lub w pełni ciągłej fizyce, system wykorzystuje warstwowy opis ruchu. Planista centralny przeszukuje dyskretny zbiór możliwych ruchów dla wszystkich robotów jednocześnie, ale każdy ruch jest wzbogacony o przewidywania dotyczące czasu wykonania, odchyleń od założonej linii oraz tego, jak blisko można bezpiecznie minąć innych. Te przewidywania pochodzą z modeli opartych na danych, wytrenowanych na rzeczywistych eksperymentach z robotami, więc planista „wie”, jak jego flota zwykle się zachowuje w praktyce.
Z odręcznych szkiców do precyzyjnego ruchu
Gdy powiązany planista wygeneruje bezkonfliktowe sekwencje punktów drogowych dla każdego robota, ramy działania przechodzą do szczegółu. Drugi moduł zamienia każdą grubą ścieżkę w gęstą, płynną trajektorię, respektując ograniczenia dotyczące ciągu, sterowania i innych czynników fizycznych. Aby zrobić to szybko, autorzy najpierw użyli ciężkiej optymalizacji numerycznej offline, by wygenerować wiele przykładów ruchu bliskiego czasowo-optymalnego, a następnie wytrenowali sieci neuronowe oparte na transformatorach, aby naśladowały te przykłady. W czasie działania sieci te potrafią wygenerować wysokiej jakości ścieżki referencyjne w mniej niż milisekundę. Trzecia warstwa — predykcyjny sterownik modelowy wyposażony w filtr bezpieczeństwa — nieustannie koryguje sterowanie, by podążać za tymi odniesieniami i wykorzystuje lokalne czujniki do omijania niespodzianek, takich jak wędrujące przeszkody czy niewielkie błędy śledzenia.
Test z czterdziestoma robotami
Zespół zademonstrował swój system na mieszanej flocie 20 quadrokopterów, 8 robotów naziemnych i 12 robotów pełniących rolę ruchomych przeszkód, wszystkie działające razem w arenie wielkości pokoju. W jednym zestawie eksperymentów roje dronów ścigały się przez ograniczone przestrzenie z prędkościami szczytowymi powyżej pięciu metrów na sekundę, unikając siebie w rodzaju trójwymiarowego baletu. W innym scenariuszu roboty naziemne wielokrotnie przechodziły przez zagracony obszar z losowo poruszającymi się przeszkodami, wykonując więcej misji, z mniejszą liczbą zatrzymań i bez kolizji w porównaniu z metodami konkurencyjnymi. Najtrudniejsze próby obejmowały wszystkie 40 robotów wykonujących wiele misji w sekwencji, przy czym system nieustannie przeplanowywał ścieżki na żądanie bez zakleszczeń czy wypadków.
Zapowiedź przyszłych systemów dostaw i magazynów
Aby pokazać, jak to może przełożyć się na zadania w świecie rzeczywistym, autorzy zainscenizowali próbne „ostatniego kilometra” dostawy i operacje magazynowe. W scenariuszu dostawy roboty naziemne transportowały drony do „brzegu rzeki”, skąd drony startowały, leciały do rozsianych punktów zrzutu, wracały do mobilnych baz, a następnie wracały na obszar startowy — wszystko to z omijaniem ruchomych przeszkód. W makiecie magazynu zespoły dronów wielokrotnie przewoziły wirtualne paczki między półkami a strefami dostaw, utrzymując gęsty, zwinny ruch i wysoką przepustowość. Te studia przypadków wymagały jedynie niewielkiego dostrojenia ram, co podkreśla zdolność systemu do adaptacji do nowych platform i misji.
Co to oznacza na przyszłość
Mówiąc prosto, praca pokazuje, że można sprawić, by duże zespoły robotów poruszały się jednocześnie odważnie i bezpiecznie w ciasnych, zmieniających się przestrzeniach, łącząc szybkie planowanie na wysokim poziomie, realistyczne modele ruchu i ostatniej instancji zabezpieczenia. Podejście „konkretne” zamienia abstrakcyjne plany w ruchy, które prawdziwe maszyny mogą wykonać z prędkością, zapewniając jednocześnie gwarancje przeciwko kolizjom i zakleszczeniom w wielu praktycznych warunkach. Chociaż wyjątkowo chaotyczne środowiska i całkowicie nieznane przestrzenie nadal pozostają wyzwaniem, ramy te wskazują drogę ku przyszłości, w której floty dronów dostawczych, robotów magazynowych i innych pracowników robotycznych będą mogły współdzielić zatłoczone przestrzenie bez stałego nadzoru człowieka.
Cytowanie: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Słowa kluczowe: koordynacja wielu robotów, planowanie ścieżek, rój robotów, automatyzacja magazynów, dostawy dronami