Clear Sky Science · pl
Strategia adaptacyjnej kompensacji zachowania inspirowana owadami przeciwko deficytowi sensorycznemu w lokalizacji źródła zapachu przez roboty
Dlaczego utrata sensora nie oznacza utraty śladu
Wyobraź sobie robota ratowniczego próbującego wywęszyć wyciek gazu lub uwięzionego człowieka w zawalonym budynku — a następnie jeden z jego kluczowych sensorów ulega awarii. Współczesne roboty często zawodzą w takiej sytuacji. To badanie czerpie inspirację z zaskakującego eksperta w nawigacji opartej na zapachu, samca jedwabnika (Bombyx mori), aby pokazać, jak zwierzęta potrafią nadal śledzić źródło zapachu nawet po utracie połowy „nosa” i jak tę strategię można skopiować w czworonożnych robotach.
Maleńki nawigator z potężnym zmysłem węchu
Wiele zwierząt — od owadów po psy — wykorzystuje unoszące się w powietrzu sygnały chemiczne do znajdowania pożywienia, partnerów czy bezpiecznego schronienia. Zapachy są szczególnie przydatne, gdy wzrok jest ograniczony przez ciemność, dym czy gruz. Jednak rzeczywiste smugi zapachowe są chaotyczne: wiatr zmienia kierunek, budynki i drzewa zakłócają przepływ, a najsilniejszy zapach nie zawsze znajduje się bezpośrednio pod wiatr od źródła. Większość robotów tropiących zapach zakłada, że wszystkie ich sensory zapachowe działają idealnie i że kierunki wiatru i zapachu ładnie się pokrywają. W naturze żadne z tych założeń nie jest prawdziwe. Jedwabnik Bombyx mori jest naturalnym kontrprzykładem: samce potrafią znaleźć samice wydzielające feromony nawet w turbulentnym powietrzu i, co intrygujące, nawet gdy jedna z ich dwóch anten — głównego narządu węchowego — zostanie usunięta.
Jak ćmy radzą sobie po utracie anteny
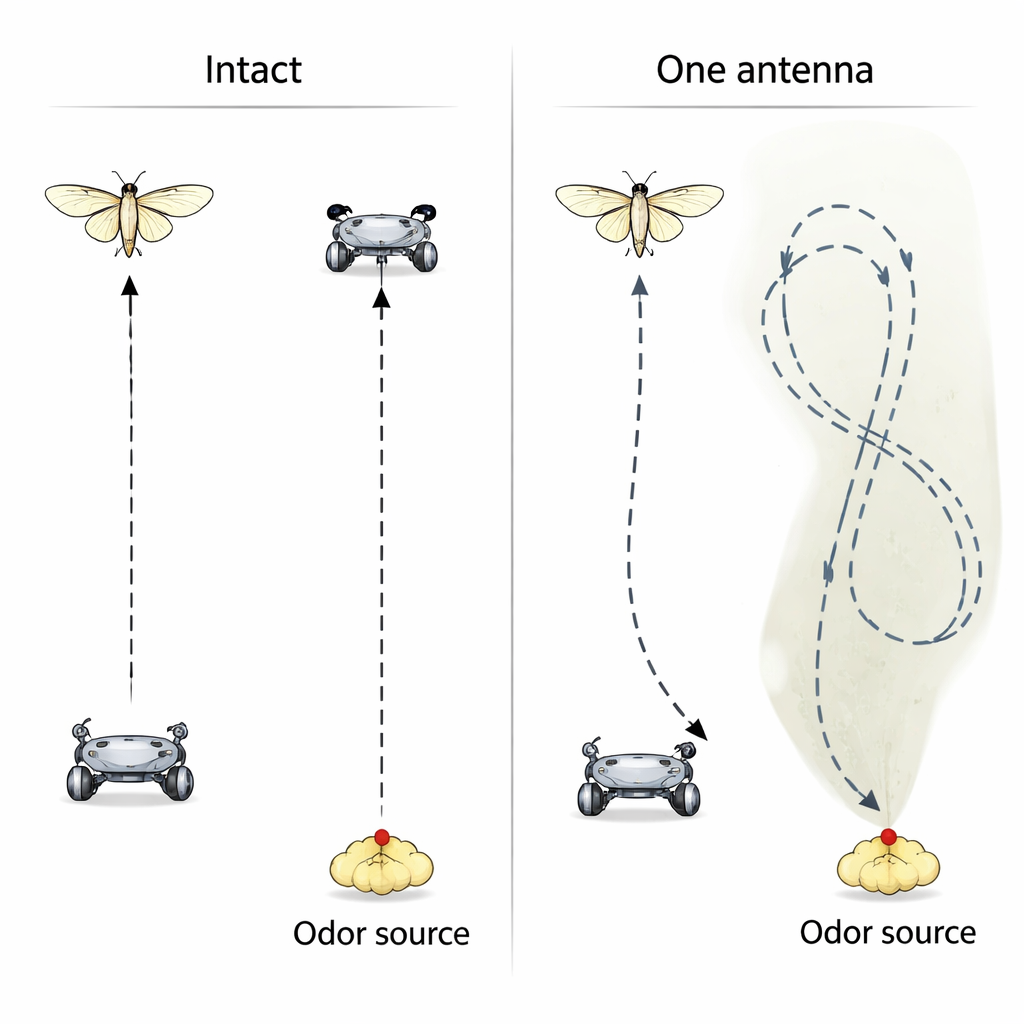
Badacze najpierw sprawdzili, jak dobrze nienaruszone samce jedwabnika oraz samce z usuniętą lewą anteną potrafią dotrzeć do źródła zapachu w warunkach laboratoryjnych. Obie grupy zaczynały 15 centymetrów od punktu emitującego feromon. Ku zaskoczeniu, wskaźnik sukcesu — dotarcie do źródła w ciągu minuty — nie spadł istotnie po usunięciu jednej anteny. Zmieniała się jednak trasa: intactowe ćmy podążały zwykle dość prostą ścieżką, podczas gdy ćmy z jedną anteną poruszały się dłużej, bardziej krętymi trasami, skręcając w stronę pozostałej anteny. Szczegółowe pomiary ruchów głowy wykazały, że ćmy zmieniały strategię skrętu w zależności od tego, gdzie wzdłuż pozostałej anteny wykryto zapach — przy nasadzie czy przy końcu — oraz w którą stronę właśnie skręcały.
Dwie proste reguły ukryte w złożonym zachowaniu
Poprzez wielokrotne pulsowanie zapachem z lewej i prawej strony oraz śledzenie kątów głowy, zespół przekształcił zachowanie w krzywe prawdopodobieństwa pokazujące, jak prawdopodobne jest, że ćma skręci w lewo lub w prawo po każdym pufnięciu. Gdy zapach trafił blisko nasady anteny, ćma zdecydowanie preferowała kontynuowanie obrotu w tym samym kierunku, de facto zobowiązując się do podążania aktualnym skrętem. Gdy zapach trafił bliżej czubka, wybór stawał się bardziej zrównoważony, z lekkim uprzedzeniem do eksploracji przeciwnej strony. Mówiąc prościej: utrata anteny nie sprawiała, że ćma się poddawała; powodowała, że przyjmowała wzór poszukiwań, który szerzej próbuje obie strony przestrzeni, szczególnie wzdłuż „krawędzi” smugi zapachowej, gdzie natężenie zapachu szybko się zmienia.
Nauczanie czworonożnego robota węchu jak ćma
Następnie badacze zbudowali robota czworonożnego z urządzeniami wykrywającymi zapach na jego „głowie”, rozmieszczonymi tak, by naśladować strukturę anteny od nasady do końca. Stworzyli dwa algorytmy poszukiwań. Pierwszy, standardowe podejście inspirowane ćmą zwane SZL (od surge–zigzag–loop), zakłada działanie dwóch sensorów zapachowych i wyznacza kierunek prostego „surge” na podstawie względnego czasu detekcji z lewej i prawej strony. Drugi, nazwany kontekstowo zależnym inspirowanym ćmą (CDMI), osadza nowe reguły ćmy: estymuje, gdzie wzdłuż pozostałego sensora wykryto zapach i korzysta z krzywych prawdopodobieństwa wyprowadzonych z eksperymentów na zwierzętach, aby zdecydować, w którą stronę się poruszyć i jak ostro skręcić. W testach w pomieszczeniu SZL działał najlepiej, gdy oba sensory były nienaruszone, dając szybkie, stosunkowo proste ścieżki. Jednak gdy jeden sensor został wyłączony, CDMI zdecydowanie przewyższał SZL, częściej odnajdując źródło poprzez podążanie za zmieniającą się krawędzią pola zapachowego po trajektoriach pętlowych podobnych do tych obserwowanych u ćm z jedną anteną.
Roboty, które pozostają sprawne, gdy coś się psuje
Aby pójść dalej, zespół przetestował roboty na zewnątrz, gdzie naturalny wiatr i turbulencje czynią smugi zapachowe silnie niejednorodnymi. Przydzielili robotowi nienaruszonemu konwencjonalny algorytm SZL, a „jednosensorowemu” robota algorytm CDMI. Oba osiągnęły porównywalne wskaźniki sukcesu, ale uszkodzony robot używający adaptacyjnej strategii inspirowanej ćmą często znajdował źródło krótszymi, mniej meandrującymi ścieżkami. To sugeruje, że w surowych, rzeczywistych warunkach lepiej jest przełączyć się z precyzyjnego, lecz kruchego schematu sensorycznego na bardziej eksploracyjną strategię podążania za krawędzią. Szersze przesłanie jest takie, że odporna na błędy nawigacja nie wymaga coraz bardziej złożonej sztucznej inteligencji. Zamiast tego proste, biologicznie ugruntowane reguły — powiązane z rozmieszczeniem sensorów na ciele i sposobem, w jaki ciało oddziałuje ze środowiskiem — mogą pomóc stworzyć roboty, które nadal działają nawet po awarii kluczowych części, co jest kluczową cechą dla długotrwałych misji eksploracyjnych i ratunkowych.
Cytowanie: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Słowa kluczowe: nawigacja węchowa, robotyka inspirowana biologią, lokalizacja źródła zapachu, sztuczna inteligencja inspirowana owadami, ucieleśniona inteligencja