Clear Sky Science · pl
Chwytak reagujący na dotyk z aktywną dłonią do zręcznej manipulacji
Roboty, które potrafią wyczuć, co trzymają
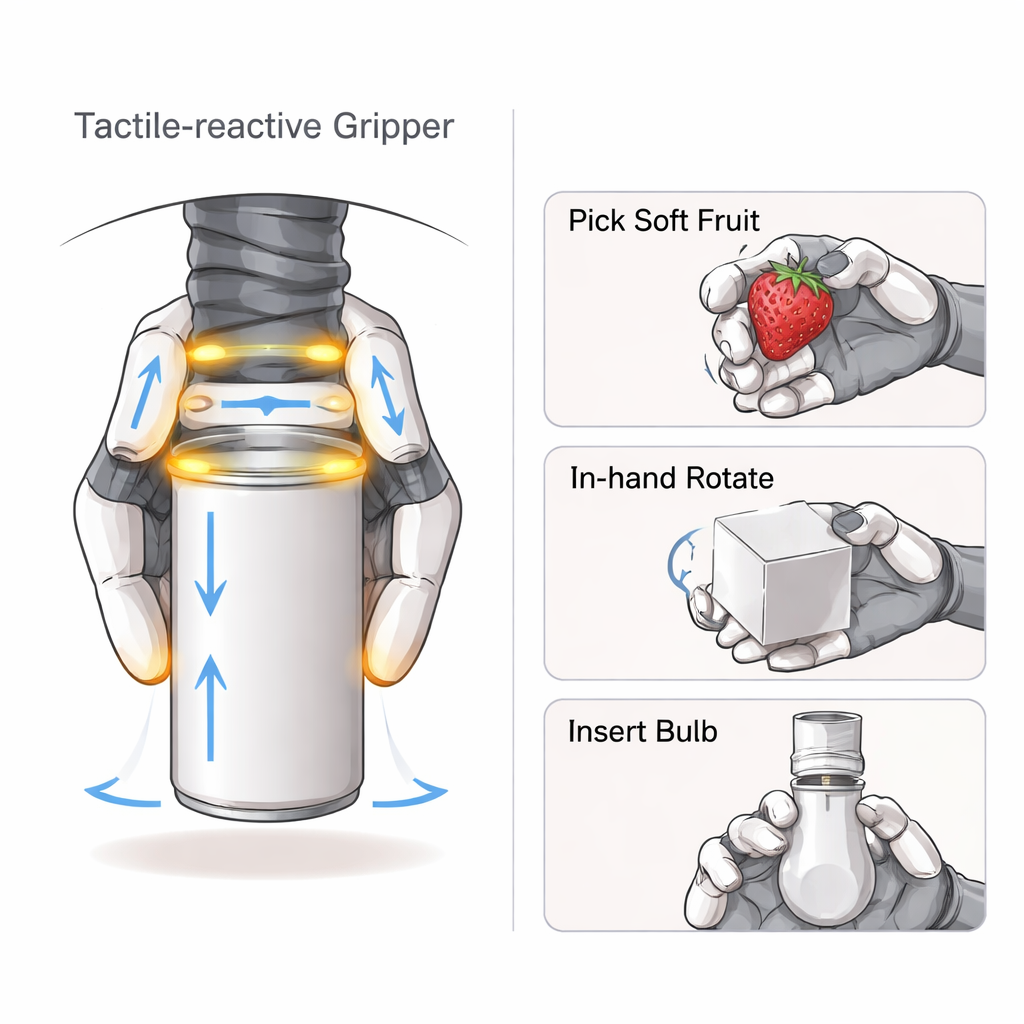
Wyobraź sobie robota, który potrafi delikatnie zerwać dojrzałą truskawkę, odkręcić zabezpieczoną butelkę dla dzieci albo wkręcić żarówkę ponad głową — wszystko bez miażdżenia, upuszczania czy niewłaściwego ustawienia przedmiotu. Artykuł opisuje nowy chwytak robotyczny, który przybliża maszyny do takiej ostrożnej, przypominającej ludzką zręczności, wyposażając robota nie tylko w inteligentne palce, lecz także w aktywną, wysoce czułą dłoń.
Dłoń, która robi więcej niż tylko trzymać
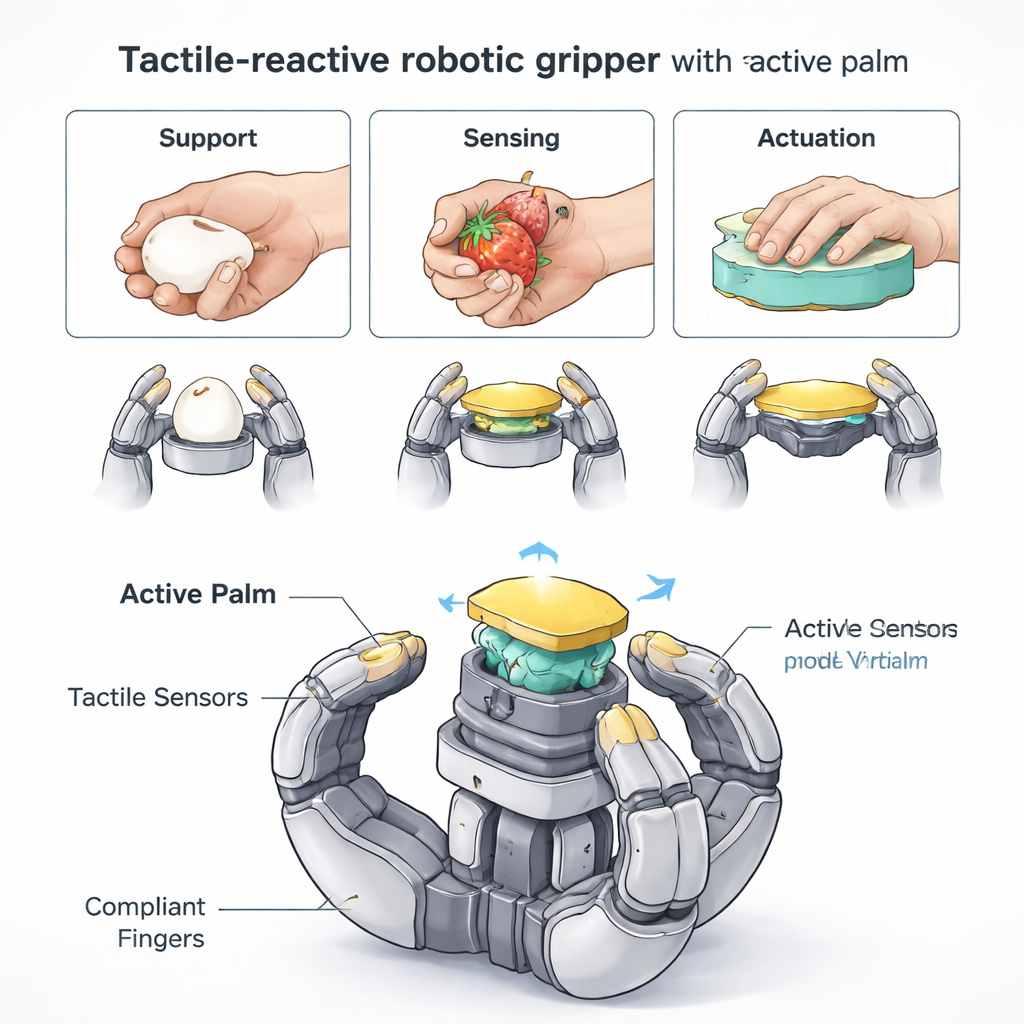
Większość obecnych robotycznych rąk to albo proste, sztywne szczypce, które potrafią jedynie chwytać, albo bardzo złożone, wielopalcowe dłonie trudne w budowie i sterowaniu. Kluczową obserwacją tej pracy jest to, że ludzkie ręce w dużym stopniu polegają na dłoni — nie tylko palcach — do podtrzymywania, odczuwania i popychania. Badacze zaprojektowali trzypalcowy chwytak z centralną dłonią, która może poruszać się w górę i w dół i jest pokryta czujnikiem dotykowym opartym na kamerze. Każdy opuszek palca ma też elastyczną podkładkę czującą ciśnienie. Razem te elementy pozwalają chwytakowi wyczuwać, gdzie i jak styka się z przedmiotem, i korygować chwyt w czasie rzeczywistym, mimo że cały system wykorzystuje tylko siedem ruchomych przegubów.
Proste ruchy, wiele sposobów chwytania
Trzy identyczne palce chwytaka mogą się obracać i zginać, umożliwiając kilka powszednich stylów chwytania: osłanianie dużych przedmiotów jak piłki, szczypanie cienkich obiektów jak karty oraz ściskanie ciężkich narzędzi w uchwycie siłowym. Miękka, przypominająca kręgosłup struktura palców naturalnie owija się wokół przedmiotów o różnych kształtach bez potrzeby szczegółowego programowania. W międzyczasie dłoń przesuwa się pionowo jak winda, dzięki czemu może naciskać na obiekt, współdzielić obciążenie z palcami lub przesunąć przedmiot w dłoni. Symulacje i eksperymenty pokazują, że nawet przy zaledwie dwóch stawach na palec plus poruszająca się dłoń, ręka potrafi przemieszczać obiekty w wielu kierunkach i unikać niezręcznych, trudnych do kontrolowania pozycji.
Czucie palcami i dłonią
Aby rozpoznać, co trzyma, chwytak łączy trzy rodzaje pomiarów: szczegółowe obrazy dotykowe z dłoni, mapy nacisku z opuszków palców oraz odczyty własnych kątów przegubów. System uczący się łączy te sygnały, przywiązując większą wagę do tych wskazówek, które są najistotniejsze dla danego przedmiotu. W testach z puszkami napojów i piłkami o różnych rozmiarach i materiałach system potrafił rozpoznać trzymany obiekt z niemal 99% dokładnością. To bogate zmysłowe odczuwanie kieruje też siłą ścisku, momentem zatrzymania zamykania palców i ruchem dłoni, by utrzymać stabilny kontakt bez nadmiernego tarcia.
Od przedmiotów testowych po owoce i żarówki
Zespół poddał chwytak powszechnie stosowanemu benchmarkowi chwytania robotycznego z przedmiotami codziennego użytku, takimi jak piłki, narzędzia i małe elementy metalowe. Uzyskał on wyższe wyniki niż kilka znanych prototypów badawczych, używając jednocześnie mniejszej liczby ruchomych części. Poza zestawami testowymi chwytak wykazał, że potrafi zbierać delikatne owoce — truskawki, winogrona, pomidory i inne — bez widocznych stłuczeń nawet kilka dni później, co potwierdzono pod światłem ultrafioletowym. Potrafił także precyzyjnie przesuwać i obracać klocki oraz cylindry w dłoni, wkręcić żarówkę w gniazdko skierowane ku górze, naciskać tłok strzykawki trzymając jej cylinder oraz odkręcać zabezpieczone nakrętki przez dociskanie i skręcanie. W wielu z tych zadań poruszająca się dłoń dostarczała dodatkowego pchnięcia, podparcia lub informacji sensorycznej, których brakuje standardowym chwytakom opartym wyłącznie na palcach.
Dlaczego to ma znaczenie dla przyszłych robotów
Praca pokazuje, że roboty nie zawsze potrzebują coraz większej liczby palców lub stawów, by być zręcznymi. Poprzez staranne koordynowanie kilku podatnych palców z aktywnie sterowaną, czułą na dotyk dłonią, ten chwytak osiąga połączenie siły, delikatności i świadomości, które zaczyna przypominać ludzką dłoń. Ponieważ elementy są w dużej mierze drukowane w 3D i wykorzystują powszechnie dostępne czujniki, konstrukcja jest stosunkowo łatwa do odtworzenia. Dzięki dalszemu sterowaniu opartemu na uczeniu podobne chwytaki mogłyby pomóc robotom obsługiwać zakupy, wspierać opiekę domową lub bezpiecznie współpracować z ludźmi w fabrykach — pewnie wyczuwając, co robią, zamiast jedynie zgadywać.
Cytowanie: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Słowa kluczowe: chwytak robotyczny, czucie dotykowe, zręczna manipulacja, robotyczna ręka, aktywna dłoń