Clear Sky Science · pl
Wykorzystanie propriocepcji w miękkich skrzydłach pod wodą umożliwia hybrydowe bierne-aktywne odrzucanie zaburzeń
Inteligentne skrzydła pod wodą
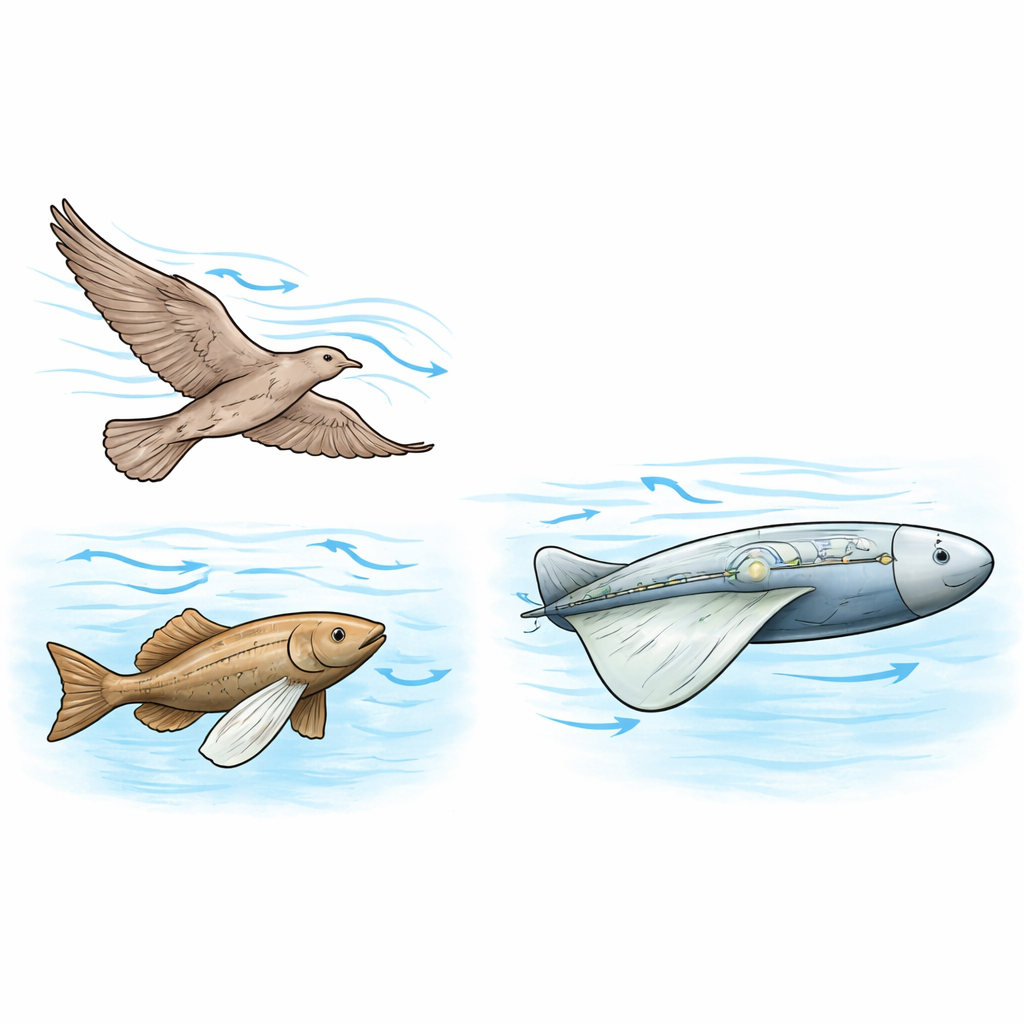
Każdy, kto widział ptaka wiszącego w porywistym wietrze lub rybę utrzymującą się w silnym nurcie, obserwował, jak przyroda rozwiązuje trudny problem inżynierski: jak pozostać na kursie, gdy otaczający płyn nie chce współpracować. Badanie pokazuje, jak nowy typ miękkiego skrzydła podwodnego, wyposażonego w „poczucie własnego stanu” podobne do propriocepcji zwierząt, potrafi automatycznie wyczuwać nagłe zmiany przepływu i przekształcać się, by zachować stabilność. Praca wskazuje drogę do przyszłych robotów podwodnych, które będą płynąć bardziej jak zwierzęta, a mniej jak sztywne maszyny, oszczędzając energię podczas radzenia sobie z nierównym morzem.
Nauka od ptaków i ryb
W przyrodzie skrzydła i płetwy nie są sztywnymi piórami; wyginają się, skręcają i pracują elastycznie. Ptaki wyczuwają ruch powietrza przez drobne receptory w piórach, a ryby korzystają z komórek wrażliwych na ciśnienie wzdłuż ciała i w promieniach płetw. Wbudowane sensory pozwalają zwierzętom odczuwać deformacje narządów podczas ruchu w wodzie lub powietrzu i reagować niemal natychmiast, odrzucając podmuchy i turbulencje. Dla porównania większość pojazdów podwodnych używa sztywnych powierzchni sterowych i oddzielnych instrumentów do pomiaru przepływu, co sprawia, że są ospałe i prądożerne, gdy środowisko staje się chaotyczne. Autorzy argumentują, że połączenie elastyczności i czujności w jednej miękkiej strukturze może zmniejszyć tę różnicę.
Miękkie skrzydło z wbudowanymi zmysłami
Zespół zbudował półskrzydła do użytku pod wodą, łącząc miękki, giętki ogon z sztywnym nosem. W miękkiej części umieszczono nadmuchiwane rurki wypełnione cieczą, które można dopompowywać, aby zmieniać krzywiznę lub profil skrzydła. Na zewnątrz przymocowano cienką elektroniczną „skórę” z silikonu i przewodów z ciekłego metalu. Gdy skrzydło się zgina, zmienia się odległość między zatopionymi przewodnikami, co modyfikuje ich pojemność elektryczną. Trenując prosty model uczenia maszynowego, by dopasować te sygnały do kształtów śledzonych kamerą, badacze zamienili e-skórę w bardzo dokładny czujnik kształtu. Po przeszkoleniu system może w czasie rzeczywistym oszacować profil skrzydła bez zewnętrznych kamer, nawet będąc zanurzonym.
Przekształcanie kształtu w sterowanie
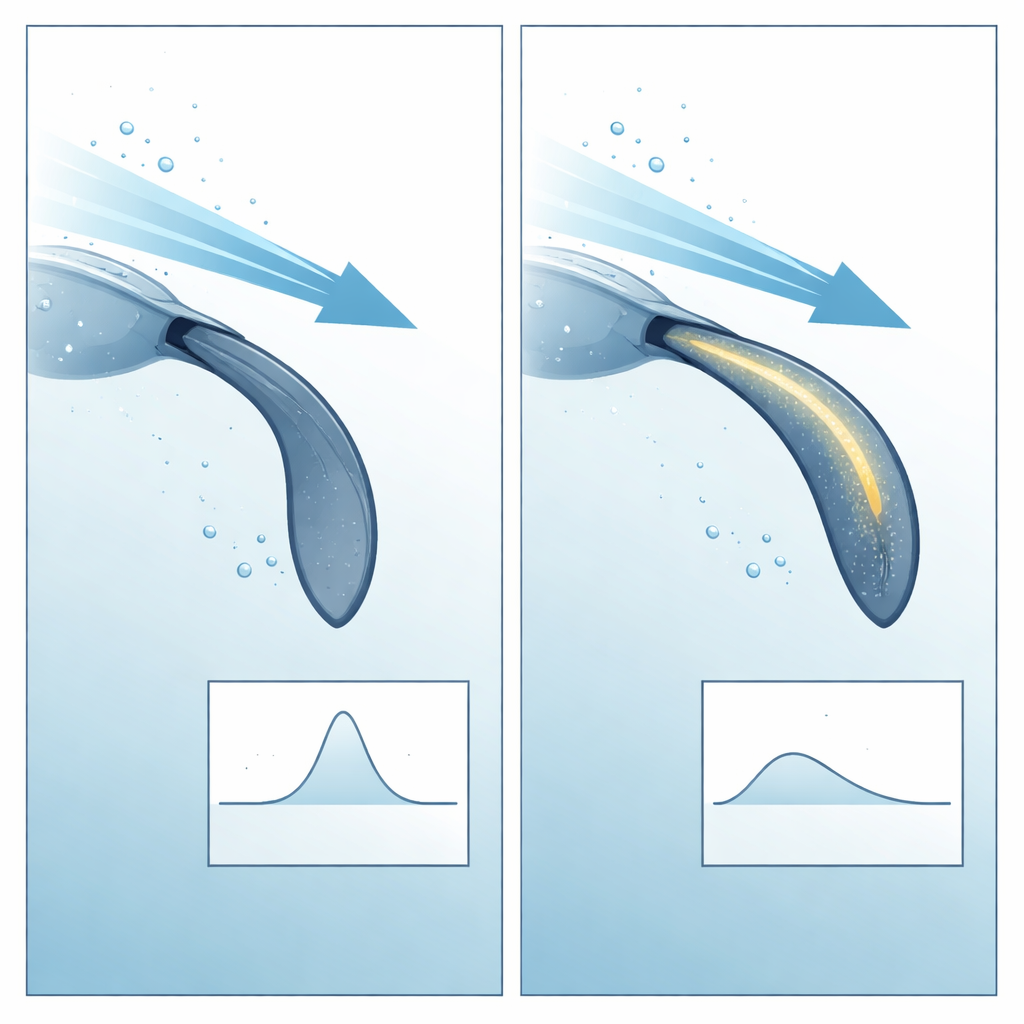
Umieszczone w tunelu wodnym propriocepcyjne miękkie skrzydło badacze poddali symulacji podmuchów jako nagłych zmian kąta skrzydła względem przepływu. Najpierw pokazali, że w warunkach ustalonych poprzez zmianę profilu można uzyskać tę samą siłę nośną przy różnych kątach przepływu, albo różne siły nośne przy tym samym kącie. Oznacza to, że gdy podmuch próbuje rozchylić skrzydło, istnieje „ścieżka” w przestrzeni kształtów, która może przywrócić pożądaną siłę nośną. Następnie zaprogramowali idealizowaną odpowiedź otwartej pętli — wiedząc dokładnie, kiedy wystąpi podmuch — by nadmuchać lub opróżnić wewnętrzne rurki w odpowiednich momentach. W tym najlepszym scenariuszu zmiana profilu zmniejszyła spadek siły nośnej podczas zaburzenia z około 50% do mniej więcej 10%.
Pozwalając skrzydłu reagować samodzielnie
Bardziej wymagający test polegał na tym, by skrzydło samo zdecydowało, kiedy coś jest nie w porządku. E-skóra rozpoznaje charakterystyczne „odciski” w sygnale profilu: szybkie przesterowanie i oscylację, gdy miękkie ciało drga pod wpływem nagłej zmiany przepływu. Gdy pojawi się ten wzorzec, prosty sterownik nadmuchuje rurki w kierunku najbardziej prawdopodobnym do przywrócenia nośności w stronę celu, bez jawnego obliczania przepływu czy sił. Nawet ta minimalistyczna strategia działa dobrze. W porównaniu z równoważnym, sztywnym skrzydłem, nieaktywnowane miękkie skrzydło samo w sobie redukuje impuls podmuchu — zasadniczo całkowite pchnięcie dostarczone w czasie — około trzykrotnie. Po dodaniu aktywnego sterowania całkowity niechciany impuls siły nośnej zmniejsza się nawet o 87%, zbliżając się do, a w niektórych przypadkach przewyższając, zdolności radzenia sobie z podmuchami odnotowane u niektórych ptaków, choć w innym medium.
Dlaczego to ma znaczenie dla przyszłych robotów
Dla czytelnika nietechnicznego kluczowy wniosek jest taki, że uczynienie robotów podwodnych bardziej miękkimi i bardziej świadomymi siebie może uczynić je jednocześnie bardziej wytrzymałymi i efektywnymi. Zamiast zwalczać zaburzenia za pomocą siłowych silników i skomplikowanych zewnętrznych sensorów, elastyczne ciało robota i wbudowana skóra pomagają absorbować i odczytywać przepływ, wywołując skromne zmiany kształtu, które utrzymują kurs. Chociaż badanie koncentruje się na pojedynczym eksperymentalnym skrzydle w kontrolowanym zbiorniku, te same zasady mogą mieć zastosowanie do całych pojazdów lub robotów poruszających się jak ryby. W dłuższej perspektywie taka „ucieleśniona inteligencja” może pozwolić maszynom eksplorować burzliwe oceany z tą samą cichą gracją, jaką ptaki i ryby już prezentują w powietrzu i wodzie.
Cytowanie: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Słowa kluczowe: miękka robotyka, pojazdy podwodne, projekt inspirowany biologią, odrzucanie zaburzeń przepływu, czucie proprioceptywne