Clear Sky Science · pl
Uosobiona percepcja dotykowa właściwości miękkich obiektów
Dlaczego warto nauczyć roboty odczuwać
Wyobraź sobie robota delikatnie badającego brzuch pacjenta, sortującego dojrzałe owoce bez ich uszkadzania albo składającego kruche elementy wyłącznie za pomocą dotyku. Aby robić to bezpiecznie, roboty muszą nauczyć się „czuć” miękkie przedmioty w sposób bogaty i przypominający ludzki. Artykuł opisuje, jak badacze zbudowali elektroniczną skórę i nowy rodzaj modelu uczącego się, dzięki którym roboty lepiej rozpoznają miękkość, kształt i fakturę powierzchni sprężystych obiektów — przybliżając maszyny do prawdziwej zręczności dotykowej.
Budowa zaawansowanego zmysłu dotyku
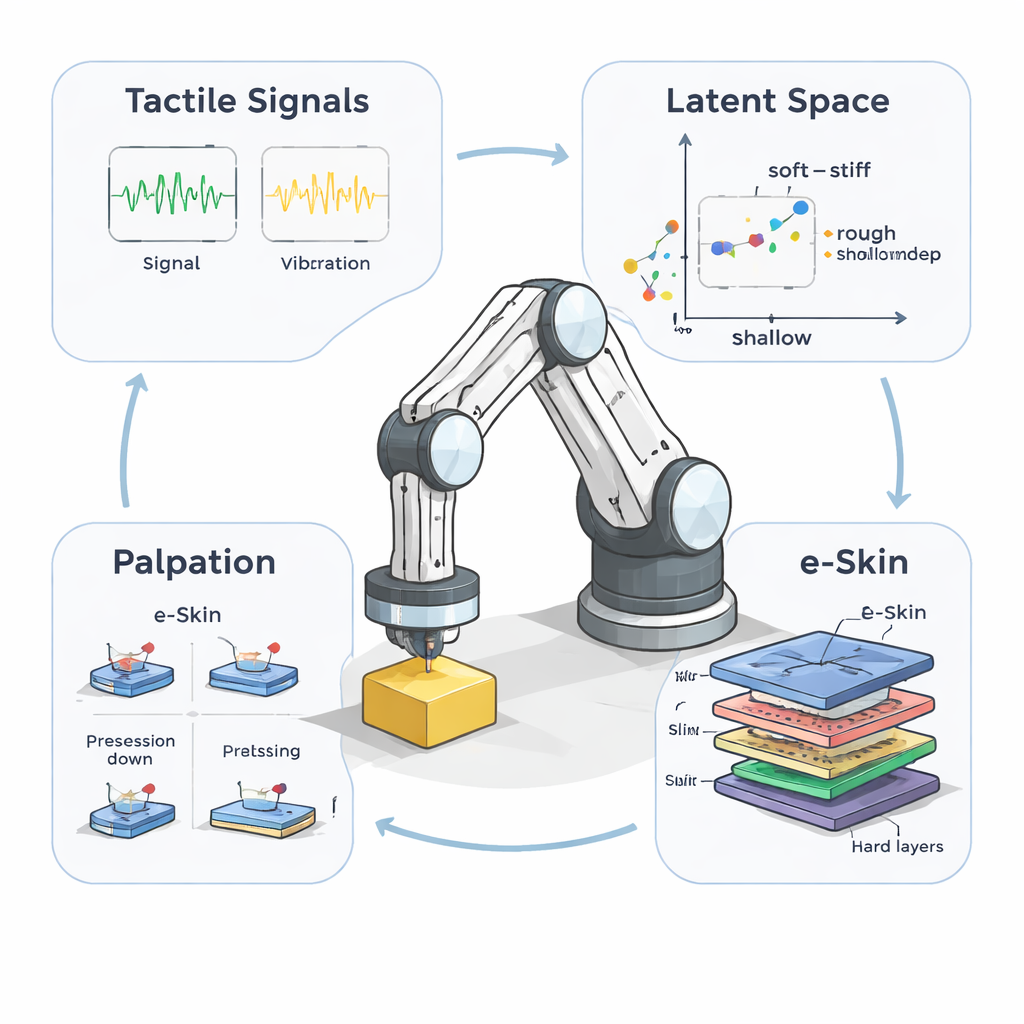
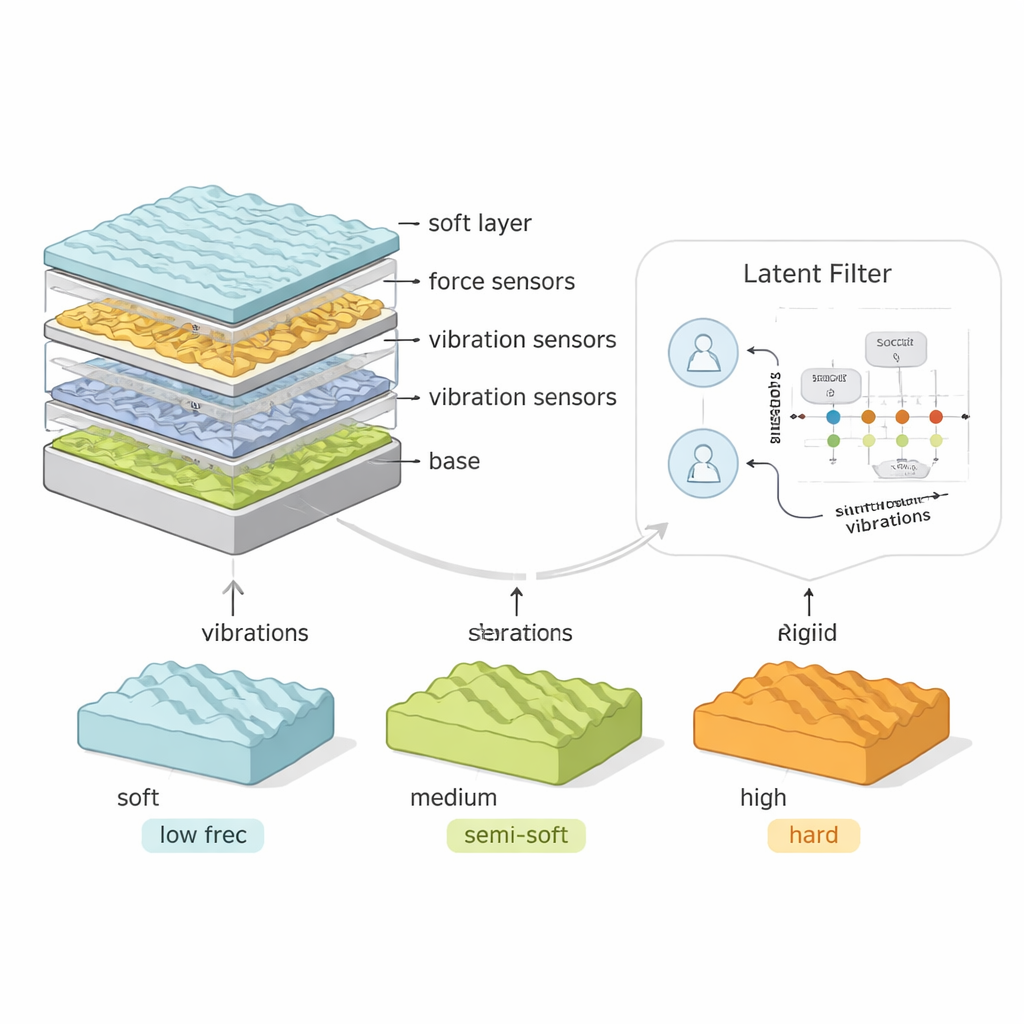
Ludzka skóra jest miękka, warstwowa i wyposażona w różne receptory dotyku reagujące na nacisk, rozciąganie i wibracje. Zespół postawił sobie za cel naśladowanie tych zdolności w robocie. Stworzyli modułową elektroniczną skórę, czyli e‑Skin, wykonaną ze stakowanych warstw silikonu z wbudowanymi czujnikami. Dwie warstwy zawierają gęste siatki czujników siły, które mierzą, jak bardzo skóra jest wgnieciona w różnych punktach, podczas gdy trzecia warstwa mieści małe akcelerometry wykrywające szybkie wibracje, takie jak drganie odczuwane przy przesuwaniu palca po szorstkiej tkaninie. Przez wymianę rodzajów silikonu mogli zmieniać miękkość lub sztywność e‑Skóry, a włączając lub wyłączając warstwy czujników, testowali różne kombinacje „narządów zmysłu”.
Projektowanie świata miękkich przedmiotów
Aby badać dotyk w kontrolowany sposób, badacze potrzebowali więcej niż prostych gumowych bloków. Stworzyli bibliotekę „obiektów falowych” o precyzyjnie dobranych właściwościach. Każdy obiekt miał pofalowaną górną powierzchnię, której wypukłości mogły być płytkie lub wysokie (amplituda) oraz blisko siebie lub daleko od siebie (częstotliwość przestrzenna), a każdy odlany był z materiałów od bardzo miękkiego silikonu po sztywny plastik. Niektóre próbki ukrywały też cienką, sztywną warstwę pod miękką powierzchnią, naśladując tkanki lub materiały zmieniające się w miarę głębszego docisku. Pozwalało to zespołowi znać dokładną miękkość i fakturę każdego obiektu, którego dotykał robot, aby porównać to, co „poczuł” robot, z rzeczywistością.
Nauka eksploracji dotykiem
Tak jak ludzie kłują, naciskają i przesuwają palcami w różny sposób, by ocenić przedmiot, robot używał trzech podstawowych ruchów palpacyjnych. Przy nacisku poruszał się w górę i w dół, by zbadać objętościową miękkość. W precesji przechylał i toczył e‑Skórę, kontaktując kilka pobliskich regionów i badając bardziej złożone kształty. Przy ślizganiu poruszał się bocznie po powierzchni, uwydatniając drobne tekstury i tarcie. Dla każdego obiektu robot wykonywał te ruchy z różną głębokością i prędkością, generując tysiące sygnałów dotykowych zmieniających się w czasie — siły zmieniające się na powierzchni skóry i wibracje rozchodzące się przez nią. Te bogate, dynamiczne strumienie danych są znacznie bardziej informatywne niż pojedyncze, statyczne naciśnięcie.
Odkrywanie ukrytych wzorców w dotyku
Aby uporządkować ten napływ informacji, autorzy wprowadzili model uczenia maszynowego, który nazwali Filtr Latentny. Zamiast próbować od razu oznaczać obiekty etykietami, model uczy się wewnętrznej „mapy”, gdzie każdy punkt podsumowuje trwającą interakcję robota z obiektem. Przestrzeń latentna jest tak skonstruowana, że niektóre jej składniki reagują szybko na natychmiastowe sygnały dotykowe, podczas gdy inne integrują informacje wolniej w czasie. Trenując Filtr Latentny na wielu interakcjach, zespół wykazał, że ta wewnętrzna mapa naturalnie wyrównuje się z istotnymi cechami fizycznymi, takimi jak chropowatość powierzchni, wysokość wypukłości czy sztywność — mimo że model nigdy nie otrzymał tych etykiet jawnie. Osobny krok regresji potwierdził, że te ukryte cechy mogą przewidywać prawdziwe właściwości mechaniczne obiektu z dobrą dokładnością.
Jak skóra, zmysły i ruch współdziałają
Eksperymenty wykazały, że nie ma jednej warstwy czujników ani strategii ruchu najlepszej we wszystkich sytuacjach. Łączenie informacji o wibracjach i sile za pomocą podejścia „późnej fuzji” — gdzie każdy rodzaj sygnału jest przetwarzany oddzielnie przed scaleniem — dało najbardziej niezawodne rozumienie miękkich obiektów. Dwie warstwy siłowe pomogły systemowi wyczuwać ścinanie i rozciąganie, które są kluczowe do wykrywania sztywności i ukrytej struktury wewnętrznej, podczas gdy wibracje były szczególnie użyteczne do wyczuwania drobnej faktury przy ślizganiu. Mechaniczna miękkość samej e‑Skóry również miała znaczenie: twardsze skóry były lepsze do pomiaru ogólnej sztywności i kształtu, podczas gdy miękkie skóry wyróżniały się w wykrywaniu subtelnych różnic w materiałach podatnych lub warstwowych. Wyniki sugerują, że dotyk robotów powinien być współprojektowany: właściwości skóry, elektronika czujników i sposób poruszania się robota muszą być dostrojone razem.
Co to oznacza dla codziennych robotów
Łącząc warstwową, inspirowaną ludźmi e‑Skórę z potężnym modelem uczącym, który uwzględnia rolę działania, ta praca pokazuje, jak roboty mogą zbudować głębsze wyczucie dotyku. Zamiast polegać tylko na kamerach czy prostych progach siły, przyszłe maszyny mogłyby odczuwać, jak obiekt ustępuje, drga i zmienia się podczas eksploracji, a następnie dostosowywać chwyt lub ruch w locie. Takie możliwości są kluczowe w zastosowaniach jak badanie palpacyjne w medycynie, obsługa miękkiej żywności czy manipulacja odkształcalnymi przedmiotami w domach i fabrykach. Mówiąc prosto, badanie dowodzi, że aby dotykać świata tak skutecznie jak my, roboty potrzebują nie tylko dobrych czujników, ale też odpowiedniego „ciała”, właściwych nawyków ruchu i sprytnego sposobu łączenia tych informacji w spójne zrozumienie tego, co czują.
Cytowanie: Dutta, A., WM Devillard, A., Zhang, Z. et al. Embodied tactile perception of soft objects properties. npj Robot 4, 15 (2026). https://doi.org/10.1038/s44182-026-00077-0
Słowa kluczowe: dotyk robotyczny, elektroniczna skóra, sensowanie miękkich przedmiotów, percepcja dotykowa, robotyka uosobiona