Clear Sky Science · pl
GenHand: uogólnione odwzorowanie kinematyki chwytu ludzkiego
Nauczanie robotów trzymania przedmiotów jak my
Od podniesienia kubka po odkręcenie śrubokręta — nasze dłonie sprawiają, że manipulacja przedmiotami wygląda na prostą. Roboty jednak często mają problemy z pewnym chwytaniem codziennych przedmiotów, zwłaszcza gdy ich chwytaki nie przypominają ludzkiej dłoni. Artykuł przedstawia GenHand, system, który uczy się na podstawie ruchów ludzkiej ręki widocznych na zwykłych zdjęciach i przekształca je w stabilne, przypominające ludzkie chwyty dla różnych typów rąk robotycznych.
Dlaczego ręce robotów potrzebują czegoś więcej niż prostego kopiowania
Wiele współczesnych systemów do teleoperacji i uczenia przez imitację próbuje bezpośrednio odtworzyć pozę ludzkiej dłoni na ręce robota. Dopasowują położenie opuszków palców i kąty stawów tak ściśle, jak to możliwe. To działa tylko wtedy, gdy ręka robota jest bardzo podobna do ludzkiej i ma zbliżoną liczbę palców i stawów. Gdy chwytak robota jest prostszy — na przykład ma tylko dwa płaskie palce — skopiowana poza może już nie zapewniać pewnego chwytu. Podejścia te w dużej mierze ignorują także kształt przedmiotu i miejsca, gdzie powinien występować solidny kontakt, więc rezultatem mogą być poślizgi, utrata równowagi lub brak prawidłowego styku z powierzchnią.
Patrząc jednocześnie na dłoń i przedmiot
GenHand rozwiązuje ten problem, koncentrując się na interakcji między dłonią a przedmiotem, a nie tylko na kształcie dłoni. Na podstawie zwykłego obrazu RGB system rekonstruuje szczegółowy model 3D przedmiotu oraz parametryczny model 3D ludzkiej dłoni. Sieć neuronowa wnioskuje pozę dłoni, a zaawansowana reprezentacja „signed distance” pozwala odtworzyć powierzchnię obiektu. Z pary tych modeli GenHand określa, gdzie opuszkami palców człowiek rzeczywiście ma kontakt z przedmiotem i w jakich kierunkach wywiera siłę. Następnie grupuje te punkty kontaktu w niewielką liczbę znaczących regionów i kierunków sił, które podsumowują istotę ludzkiego chwytu, filtrując jednocześnie nieistotne detale.
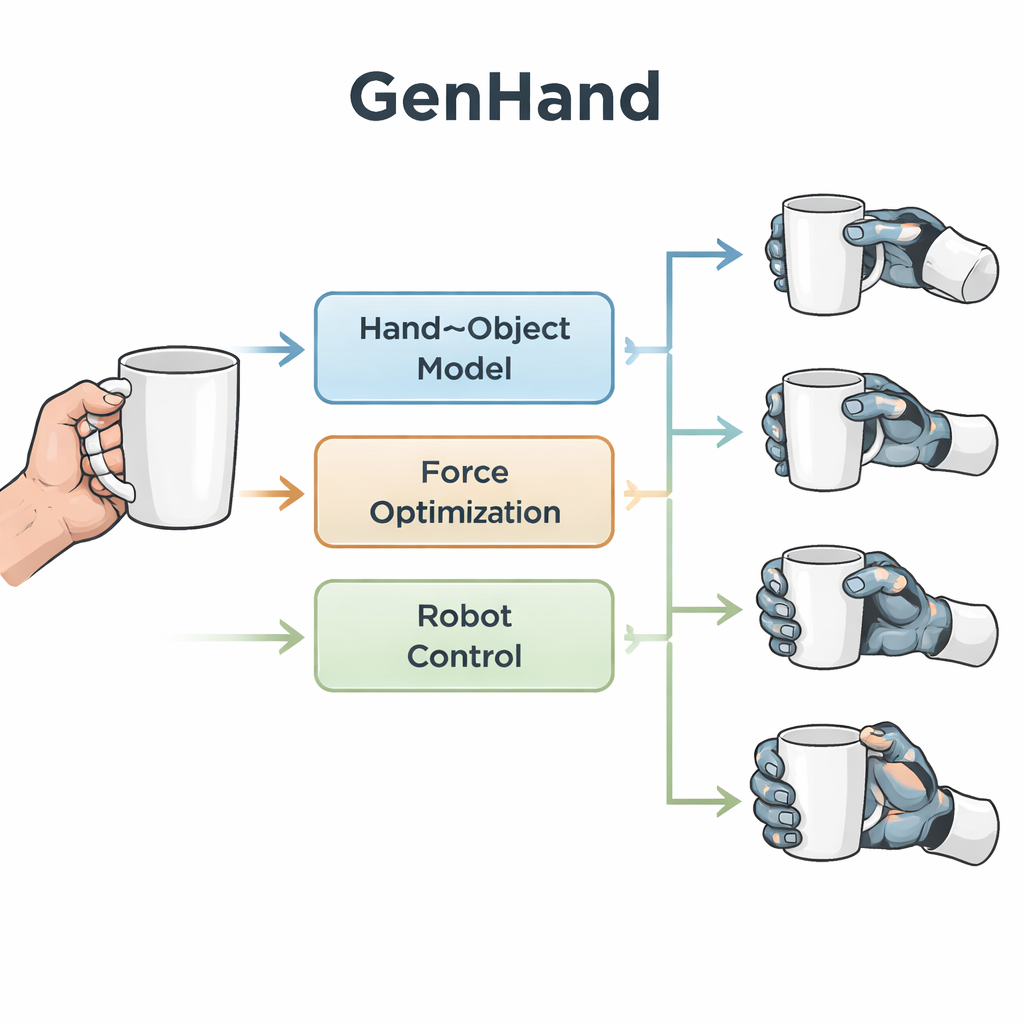
Przekształcanie chwytu dla każdego robota
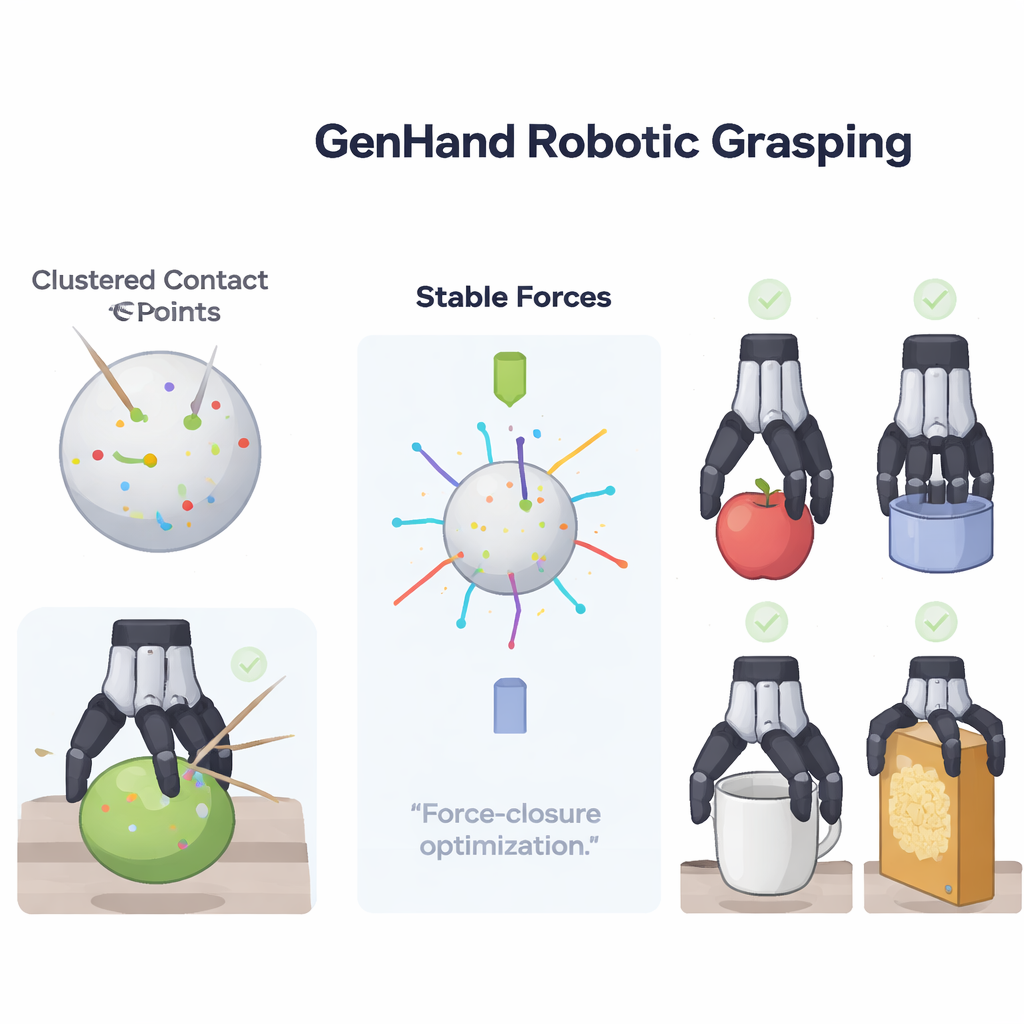
Gdy GenHand rozpozna kluczowe regiony kontaktu i sposób, w jaki podtrzymują przedmiot, tworzy nowy zestaw „kotwic kontaktowych” dopasowanych do konkretnego chwytaka robota. Dla prostego chwytaka dwupalczastego może pozostawić tylko dwa przeciwstawne regiony kontaktu, jak para kciuków ściskających pudełko. Dla bardziej zręcznych rąk z trzema, czterema czy pięcioma palcami można przypisać dodatkowe kotwice, aby lepiej odwzorować bogaty wzór kontaktów ludzkiego chwytu. Następnie krok optymalizacji matematycznej wyszukuje miejsca kontaktu na powierzchni obiektu, które mogą zrównoważyć siły i momenty we wszystkich kierunkach — własność znaną jako zamknięcie sił (force closure). Kluczowe jest to, że GenHand pozostaje blisko oryginalnych kontaktów ludzkich, jednocześnie zapewniając, że otrzymany chwyt będzie fizycznie stabilny w realnym świecie.
Od stabilnych kontaktów do rzeczywistych ruchów robota
Z ustalonymi kotwicami kontaktowymi, drugi etap optymalizacji znajduje rzeczywiste kąty stawów i ruchy nadgarstka robota, które pozwolą zrealizować te kotwice bez przekraczania ograniczeń stawów ani powodowania kolizji z przedmiotem. W tym celu GenHand wielokrotnie dopasowuje potencjalne miejsca kontaktu robota do pożądanych kotwic, koryguje pozę i sprawdza, czy elementy mechaniczne nie penetrują obiektu. Proces ten stosuje się do różnych rąk robotycznych — od prostego chwytaka dwupalczastego Robotiq po wysoko artykułowaną pięciopalczastą rękę Shadow — i testuje w symulacji fizycznej. W porównaniu z wiodącym rozwiązaniem bazowym, które jedynie naśladuje geometrię opuszków palców, GenHand osiąga znacznie mniejsze niezbilansowanie sił, dokładniejszy kontakt powierzchniowy i istotnie wyższe wskaźniki sukcesu przy podnoszeniu i trzymaniu 20 codziennych przedmiotów w różnych warunkach tarcia.
Dokąd to może zaprowadzić codzienne roboty
Dla czytelnika niebędącego specjalistą najważniejsze jest to, że GenHand daje robotom lepsze wyczucie „jak” trzymać rzeczy, a nie tylko „gdzie” umieścić palce. Ucząc się na prawdziwych ludzkich chwytach i wymuszając podstawowe zasady stabilności fizycznej, potrafi odwzorować tę samą demonstrację ludzką na bardzo różne ręce robotyczne, zachowując solidne, niezawodne chwyty. Ułatwia to sterowanie robotami teleoperowanymi, pomaga systemom uczącym się trenować na bogatszych przykładach i przybliża nas do robotów domowych i przemysłowych, które bezpiecznie manipulują tak szeroką gamą przedmiotów, jak ludzie.
Cytowanie: Qi, L., Popoola, O., Imran, M.A. et al. GenHand: generalised human grasp kinematic retargeting. npj Robot 4, 19 (2026). https://doi.org/10.1038/s44182-026-00076-1
Słowa kluczowe: chwyt robotyczny, teleoperacja, demonstracja ludzka, ręce robotów, manipulacja