Clear Sky Science · pl
Niedrogi miniaturowy chwytak robotyczny drukowany w 3D z zintegrowaną kamerą do detekcji sił i momentów opartych na informacji wzrokowej
Dlaczego małe, miękkie chwytaki są ważne
Roboty stają się mniejsze i wykonują delikatniejsze zadania — od montażu drobnych kół zębatych po zrywanie dojrzałych jagód bez ich rozgniecenia. Większość robotycznych dłoni nadal jednak zaciska się „na ślepo”, z niewielką świadomością siły nacisku. W artykule przedstawiono tani, drukowany w 3D miniaturowy chwytak, określany jako „Seezer”, który potrafi zarówno chwytać kruche przedmioty, jak i „czuć” siły dzięki małej kamerze umieszczonej wewnątrz opuszki palców zamiast drogich czujników siły.
Delikatna dłoń, która widzi
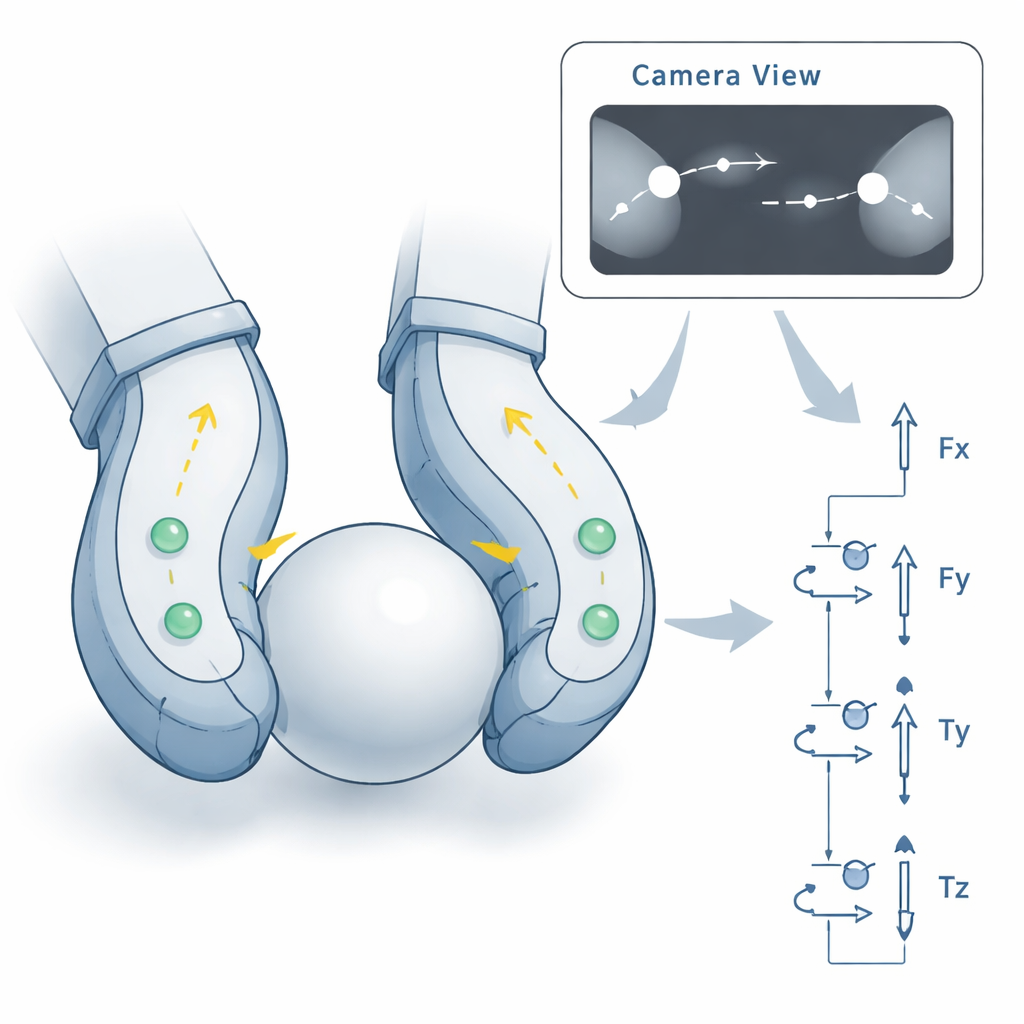
Seezer to miękki, podatny chwytak robotyczny, którego palce zginają się, zamiast pracować na zawiasach jak metalowe szczypce. Główny pomysł polega na wydrukowaniu prawie wszystkich elementów w jednym kawałku na konsumencznej drukarce 3D: monolitycznej części palca zawierającej elastyczne stawy, kształty opuszki dostosowane do zadania oraz niewielkie wbudowane markery. Ten jednorazowy moduł opuszki nasuwa się na zwarte jednostkowe napędy zawierające miniaturową kamerę i źródła światła. Gdy silnik obraca ślimak, elastyczne stawy się zaginają, a palce zaciskają się wokół przedmiotu, podczas gdy kamera obserwuje opuszki i przestrzeń przed chwytakiem.

Odczytywanie siły z ugięć palców
Zamiast integrować przewody, tensometry czy płytki ciśnieniowe w palcach, Seezer maluje wnętrze informacjami wizualnymi bogatymi w sygnał. Każda opuszka ma małe okrągłe markery „fiducjalne”, których położenie na obrazie z kamery zmienia się w momencie deformacji palca. Oprogramowanie najpierw wykrywa i śledzi te markery w kolejnych klatkach. Następnie, opierając się na krótkiej sekwencji kalibracyjnej, proste modele matematyczne uczą się, jak przesunięcia pozycji markerów korelują z rzeczywistymi siłami pchającymi i ciągnącymi działającymi na każdą opuszkę. Łącząc trzy siły opuszki z podstawowymi zasadami fizyki, system estymuje całkowite siły i momenty działające na chwytak we wszystkich sześciu stopniach swobody, a także siłę ściskania między palcami.
Jak dobrze wykrywa siły
Aby ocenić dokładność tej detekcji opartej na kamerze, autorzy porównali estymaty Seezera z odczytami wysokoprecyzyjnego komercyjnego sensora siły/momentu w kontrolowanym ustawieniu laboratoryjnym. W jednej wersji projektu opuszki (sztywniejsze końcówki) chwytak mierzył siły chwytu do około 1,1 newtona z typowymi błędami między 8% a 17%, a pełne siły i momenty w sześciu osiach z błędami przeważnie między 8% a 24%. Miększa wersja opuszki kosztem maksymalnej siły zyskała na czułości, generując mniejsze siły, ale nadal porównywalne błędy procentowe. Co istotne, modele potrzebowały tylko 31 do 141 punktów kalibracyjnych — znacznie mniej niż tysiące obrazów często wymaganych przez metody głębokiego uczenia pracujące na pełnych klatkach kamer.
Od maleńkich kół zębatych po miękkie owoce
Dwa zadania demonstracyjne pokazują, co ten chwytak może zrobić w praktyce. W jednym Seezer wielokrotnie zdejmował małe drukowane w 3D koła zębate z osi, przenosił je i odkładał z powrotem, używając wewnętrznej kamery zarówno do wyrównania wpustu koła z osią, jak i do monitorowania ruchu palców. To odzwierciedla precyzyjny montaż przemysłowy w ograniczonych przestrzeniach. W drugim przykładzie chwytak zrywał porzeczki z łodyg. System w czasie rzeczywistym obserwował szacowaną siłę chwytu i przerywał zamykanie po osiągnięciu ustawionego progu siły, tak by owoc został zrywany bez zgniecenia. Obie demonstracje działały na taniej elektronice i pokazały, że jeden projekt może obsłużyć sztywne i miękkie obiekty o wymiarach kilku milimetrów.
Wyzwania i przyszłe zastosowania
Seezer pozostaje dowodem koncepcji i ma ograniczenia. Śledzenie markerów działa najlepiej w stabilnych, dobrze oświetlonych scenach z mało złożonym tłem; zmienne oświetlenie, błyszczące powierzchnie i skomplikowane ruchy mogą powodować błędy śledzenia. Umiarkowana szybkość klatkowa kamery ogranicza też tempo reakcji systemu w zadaniach wymagających szybkiej kontroli siły lub bogatego sprzężenia dotykowego. Materiały palców mogą się męczyć lub zmieniać właściwości przy długotrwałym użyciu, a zespół nie przeprowadził jeszcze systematycznych testów wydajności w dłuższej perspektywie. Autorzy sugerują, że bardziej odporne algorytmy śledzenia albo połączenie ich sprzętu z nowoczesnymi estymatorami siły opartymi na głębokim uczeniu mogłyby poprawić dokładność i niezawodność, podczas gdy postęp w druku 3D powinien umożliwić dalszą miniaturyzację i jednorazowe, sterylizowalne opuszki do zastosowań chirurgicznych lub laboratoryjnych.
Co to oznacza dla robotyki codziennej
Mówiąc prościej, praca pokazuje, że mała, tania robotyczna dłoń może jednocześnie widzieć i czuć, obserwując, jak jej miękkie palce się zginają. Przy niewielkiej liczbie danych kalibracyjnych i standardowych podzespołach Seezer estymuje, z jaką siłą zaciska oraz w którą stronę działają siły kontaktowe i momenty, z dokładnością wystarczającą do delikatnych zadań manipulacyjnych. Jeśli poprawi się jej odporność, ta sama metoda mogłaby pomóc przyszłym robotom obsługiwać małe, kruche przedmioty — jak urządzenia medyczne, elektronikę, owoce czy nawet tkanki w chirurgii małoinwazyjnej — bez masywnych czujników czy skomplikowanego sprzętu, wprowadzając czuły dotyk tam, gdzie liczy się ograniczona przestrzeń i koszty.
Cytowanie: Duverney, C., Gerig, N., Hüls, D. et al. Affordable 3D-printed miniature robotic gripper with integrated camera for vision-based force and torque sensing. npj Robot 4, 10 (2026). https://doi.org/10.1038/s44182-026-00075-2
Słowa kluczowe: miękki chwytak robotyczny, detekcja siły oparta na wizji, robotyka drukowana w 3D, miniaturowa manipulacja, sprzężenie zwrotne hapticzne