Clear Sky Science · pl
Postępy w robotyce miękkiej: niedawne osiągnięcia w aktywatorach z dielektrycznych elastomerów i płynów
Miękkie roboty, które poruszają się bardziej jak mięśnie
Wyobraź sobie robota, który potrafi bezpiecznie przytulić dziecko, przecisnąć się przez gruz w zawalonym budynku albo delikatnie masować słabnące serce. Do takich zadań maszyny muszą się zginać i rozciągać jak tkanka żywa, a nie hałasować jak metal. Artykuł przeglądowy wyjaśnia, jak nowa klasa „miękkich” elektrycznych mięśni — wykonanych z gumowatych ciał stałych i płynów — przybliża tę wizję do rzeczywistości oraz jakie wyzwania pozostają, zanim technologie te opuścić laboratoria i wejdą do codziennego użytku.
Od sztywnych silników do miękkich mięśni elektrycznych
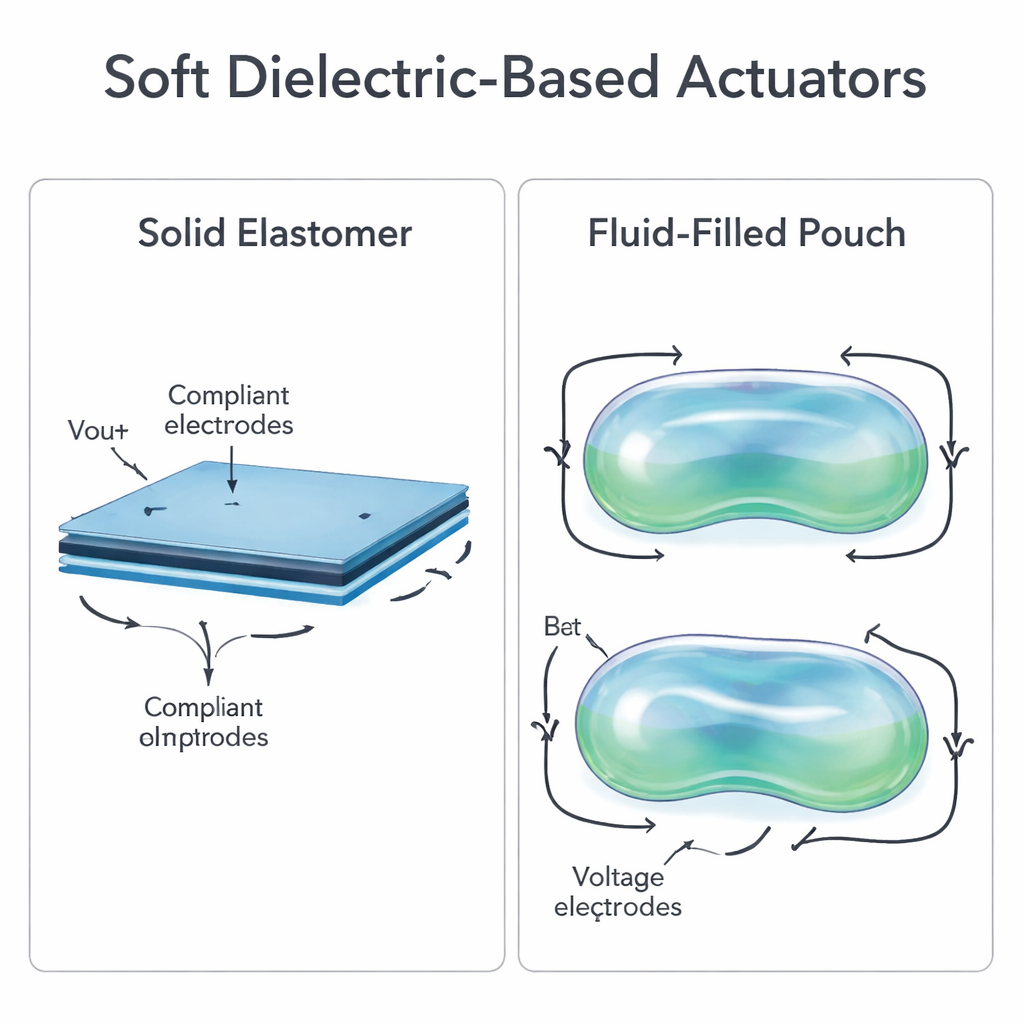
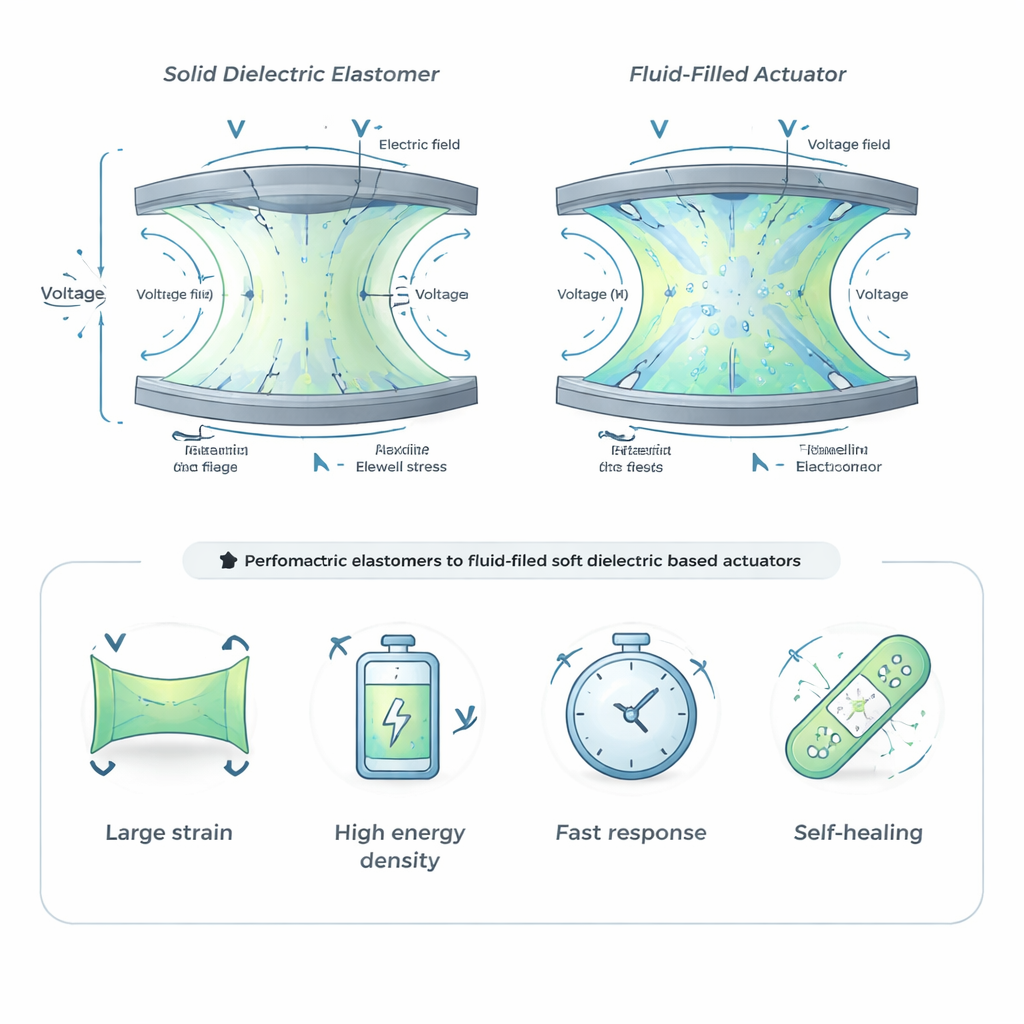
Większość robotów przemysłowych opiera się na ciężkich, sztywnych silnikach i przekładniach. Są one potężne i precyzyjne, ale też drogie, kruche i potencjalnie niebezpieczne w pobliżu ludzi. Roboty miękkie, zbudowane z rozciągliwych materiałów przypominających silikonowe foremki czy gumki recepturki, wymieniają siłę brutto na delikatność, adaptacyjność i odporność. W tekście skupiono się na miękkich aktywatorach napędzanych prądem: aktywatorach z dielektrycznych elastomerów (DEA), które wykorzystują warstwę gumy, oraz aktywatorach z dielektrycznych płynów (DFA), gdzie izolujący elektrycznie płyn jest zamknięty w elastycznej kieszeni. W obu przypadkach przyłożenie napięcia między dwiema zgodnymi elektrodami ściska materiał siłami elektrostatycznymi i bezpośrednio zamienia energię elektryczną w ruch, osiągając duże odkształcenia, wysoką gęstość energii i szybkie czasy reakcji.
Jak materiały umożliwiają działanie mięśni
Aby zachowywać się jak użyteczne mięśnie, te urządzenia potrzebują bardzo specyficznych materiałów. W DEA centralna warstwa gumy musi być niezwykle miękka, by łatwo się rozciągać, a jednocześnie wytrzymywać wysokie pola elektryczne bez rozdarć czy przebicia. Badacze stroją tę równowagę dwiema głównymi strategiami. Pierwsza polega na projektowaniu nowych polimerów — od akryli, silikonów i poliuretanów po bardziej egzotyczne kopolimery blokowe — które zawierają liczne polarne grupy chemiczne (zwiększające odpowiedź elektryczną) w elastycznych, nisko-sztywnych sieciach. Druga to tworzenie kompozytów przez dodawanie drobnych cząstek lub cieczy, które podnoszą zdolność materiału do magazynowania energii elektrycznej. Podobne zasady stosuje się przy projektowaniu DFA: inżynierowie dobierają oleje i inne dielektryczne ciecze o odpowiedniej lepkości, stabilności i zgodności z cienkimi plastikowymi czy silikonowymi powłokami, tak aby napięcie mogło szybko przemieszczać płyn i tworzyć wybrzuszenia, pociągnięcia czy wibracje bez przecieków i degradacji chemicznej.
Wytwarzanie i napędzanie miękkich aktywatorów na skalę
Przekształcenie tych przemyślanych materiałów w niezawodne urządzenia to odrębne wyzwanie inżynieryjne. Tradycyjna produkcja często wiąże się z pracochłonnymi, ręcznymi etapami: rozciąganiem cienkich folii na ramach, malowaniem lub drukiem miękkich elektrod, układaniem warstw oraz — w przypadku DFA — wstrzykiwaniem cieczy i uszczelnianiem kieszeni. Artykuł przegląda nowsze metody wytwarzania, takie jak atramentowy i sitodruk, wytłaczanie włókien‑mięśni oraz druk 3D z wieloma materiałami, który może jednocześnie nakładać elektrody i dielektryki. Opisano też, jak różne kształty generują różne ruchy: płaskie płaty zwiększające powierzchnię, kopuły wypychające się do góry, zwijane cylindry kurczące się wzdłuż długości oraz struktury wyginające się lub drgające. Ponieważ materiały te mogą się starzeć, przeciekać lub ulegać przebiciu elektrycznemu, autorzy podsumowują badania dotyczące trwałości i typowych trybów awarii oraz podkreślają dążenie do projektów samonaprawczych, które potrafią odzyskać funkcję po iskrze czy przebiciu.
Mądrzejsze sterowanie i nowe zastosowania
Podobnie jak naturalne mięśnie, miękkie aktywatory muszą być sterowane. Proste schematy otwartej pętli tylko podają wzorzec napięcia, ale może on dryfować w miarę nagrzewania się materiału lub pod wpływem pełzania. Bardziej zaawansowane podejścia osadzają czujniki — albo wykorzystują sygnały elektryczne samego aktywatora — do pomiaru odkształcenia, siły czy drgań w czasie rzeczywistym i odpowiedniego korygowania sygnału napędowego. Naukowcy eksperymentują teraz z regulatorami opartymi na uczeniu maszynowym i uczeniu ze wzmocnieniem, które radzą sobie nieliniowym, zależnym od historii zachowaniem miękkich materiałów. W zakresie zastosowań artykuł pokazuje szerokie spektrum: sztuczne mięśnie podnoszące wiele razy własną masę, roboty pływające i latające wzorowane na rybach i owadach, noszalne opaski haptyczne i nakładki na opuszki palców zapewniające realistyczne sprzężenie dotyku, obiektywy zmiennego powiększenia i skóry kształtujące światło inspirowane kałamarnicą i ludzkim okiem, powierzchnie zmieniające kształt oraz koncepcyjne urządzenia medyczne, które pewnego dnia mogą wspierać słabnące serca lub sparaliżowane twarze.
Co jeszcze stoi między pokazami w laboratorium a robotami w świecie rzeczywistym
Pomimo obietnic, te elektryczne mięśnie wciąż mają przeszkody do pokonania, zanim bezpiecznie zasilić będą mogły domowych pomocników, implanty medyczne czy masowe urządzenia do noszenia. Wiele wymaga napięć rzędu kilowoltów, co komplikuje kwestie bezpieczeństwa i elektronikę. Materiały, które dobrze sprawdzają się w krótkich testach, mogą się usztywniać, wysychać lub zawodzić po milionach cykli. Produkcja często jest zbyt wolna i niejednorodna do wytwarzania na dużą skalę. Trudne pozostaje też recyklingowanie czy biodegradacja większości obecnych polimerów. Autorzy argumentują, że postęp zależeć będzie od współprojektowania na wielu poziomach: nowych miękkich materiałów łączących niską sztywność, wysoką odpowiedź elektryczną, odporność i zdolność samonaprawy; zautomatyzowanej, sterowanej danymi produkcji i testowania; oraz systemów sterowania wykorzystujących wbudowane sensory i lekką sztuczną inteligencję. Razem te udoskonalenia mogłyby dać przyszłym robotom mięśnie, które nie tylko są silne i szybkie, ale też bezpieczne, adaptacyjne i zrównoważone.
Cytowanie: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Słowa kluczowe: robotyka miękka, aktywatory z dielektrycznych elastomerów, aktywatory z dielektrycznych płynów, sztuczne mięśnie, interfejsy haptyczne