Clear Sky Science · pl
Predykcyjne sterowanie gry dla spersonalizowanej i ukierunkowanej interaktywnej pomocy
Roboty, które czują się jak dobrzy partnerzy treningowi
Wyobraź sobie partnera do ćwiczeń lub fizjoterapeutę, który zawsze wie, kiedy pomóc podnieść, kiedy pozwolić ci się trochę zmagać i jak silny planujesz następny ruch. W artykule pokazano, jak nadać robotom stykowym — takim jak egzoszkielety używane w rehabilitacji czy w zakładach — podobną intuicję. Poprzez matematyczne „zgadywanie”, jak osoba zamierza się poruszyć w ciągu następnej sekundy lub dwóch, robot może płynnie współdzielić wysiłek, zmniejszać zmęczenie i subtelnie kierować sposobem poruszania się i uczenia.
Dlaczego współdzielenie wysiłku z robotami jest trudne
Gdy robot jest fizycznie połączony z człowiekiem — pomagając mu poruszać kończyną albo nieść ciężki przedmiot — obie strony nieustannie popychają i reagują. Tradycyjne regulatory robotów w większości pomijają to, co człowiek planuje; realizują jedynie cele wydajnościowe, takie jak dokładność czy oszczędność energii. To może sprawić, że robot będzie albo zbyt sztywny i dominujący, albo zbyt pasywny i niepomocny. Prawdziwi ludzcy partnerzy radzą sobie lepiej: wyczuwają sposób poruszania się drugiego, dostosowują się do jego możliwości i zachęcają do różnych zachowań, od relaksu po intensywny wysiłek. Autorzy twierdzą, że aby przybliżyć roboty do takiej interakcji, robot musi jawnie modelować, jak człowiek planuje ruchy i ile wysiłku jest gotów włożyć.
Ujęcie interakcji człowiek–robot z perspektywy teorii gier
Badacze opierają się na teorii gier — matematyce interakcji strategicznych — traktując człowieka i robota jako dwóch „graczy” współdzielających to samo zadanie. Każdy ma własne cele: człowiek chce śledzić pożądany ruch przy jak najmniejszym wysiłku, a robot chce pomagać w śledzeniu ruchu, jednocześnie zmniejszając wysiłek osoby. Kluczowe jest to, że obie strony są założone do patrzenia tylko krótko w przód, w skończonym oknie planowania trwającym około jednej do dwóch sekund, co odzwierciedla naturalny sposób planowania ruchów przez ludzi. W tym oknie zespół wyprowadza zwartą formułę równowagi Nasha: zrównoważony układ sił, w którym ani człowiek, ani robot nie mogą poprawić swojego wyniku bez zmiany zachowania drugiej strony. Ta równowaga definiuje, jak mocno każdy powinien pchać w danym momencie.
Nauka odczytywania intencji człowieka przez robota
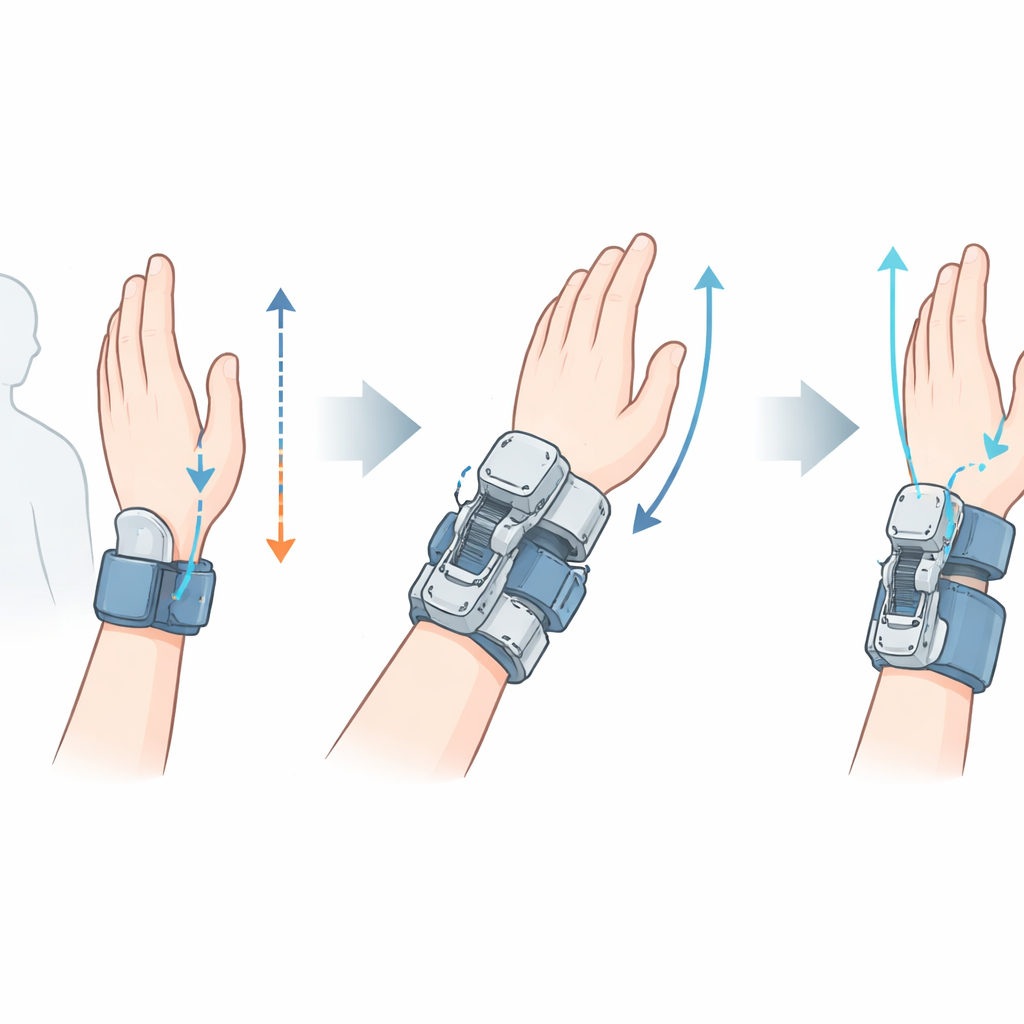
Aby robot mógł grać tę „grę ruchu”, musi najpierw wywnioskować, jak bardzo człowiek ceni dokładność względem wysiłku — ukrytą preferencję, która różni się między osobami, a nawet zmienia w czasie. Autorzy rozwiązują to za pomocą odwrotnego podejścia opartego na grach. Gdy osoba się porusza, czujniki mierzą kąt stawu i moment, który wytwarza. Sterownik następnie wielokrotnie wyszukuje zestaw ludzkich preferencji, które najlepiej wyjaśniałyby niedawną historię ruchów i sił. Z tymi preferencjami przewiduje, jak człowiek prawdopodobnie zachowa się w następnym krótkim horyzoncie i oblicza optymalną siłę wspomagającą robota. Całość działa w czasie rzeczywistym na egzoszkielecie nadgarstka, który pomaga badanym śledzić poruszający się cel ręką.
Ludzie i roboty uczą się koordynować
Zespół przetestował swój regulator na trzydziestu zdrowych dorosłych w trzech eksperymentach. W pierwszym badani informowano, by przełączać się między aktywnym śledzeniem celu a byciem pasywnym. Sterownik szybko dostosowywał swoje wewnętrzne oszacowanie, jak bardzo osoba dba o dokładność — wzrastało ono w fazach aktywnych i spadało prawie do zera, gdy osoba się relaksowała. W drugim eksperymencie uczestnicy naprzemiennie wykonywali próby z pomocą robota i bez niej. Dzięki nowemu regulatorowi robot zmniejszył wysiłek stawowy i aktywność mięśniową ludzi, jednocześnie poprawiając dokładność śledzenia. W kolejnych próbach wzorzec interakcji każdej osoby ustabilizował się w indywidualną „równowagę”, a korelacja między siłami człowieka i robota wzrosła — dowód rosnącego wzajemnego rozumienia. W trzecim eksperymencie badacze wprowadzili pojedynczy pokrętło wspomagania, meta-parametr przesuwający, jak silnie robot stara się minimalizować wysiłek osoby. Obrót tego pokrętła płynnie zmieniał, ile wysiłku ludzie decydowali się włożyć, bez pogorszenia wykonywania zadania.
Kierowanie zachowaniem za pomocą jednego pokrętła
Meta-parametr wspomagania pozwala projektantom objąć spektrum stylów interakcji jednym kontrolerem: od prawie braku pomocy, przez równy podział wysiłku, aż po niemal pełne wsparcie, gdzie robot prowadzi, a człowiek może się zrelaksować. Przy ustawieniach pośrednich ludzie zwykle najlepiej koordynowali się z robotem, każdy biorąc na siebie w przybliżeniu połowę obciążenia. Wzorzec wnioskowanych preferencji człowieka pozostał spójny dla danej osoby przy różnych poziomach pomocy — z wyjątkiem sytuacji, gdy robot robił prawie wszystko, wtedy zachowania ujednoliciły się, bo ludzie przestali się w dużym stopniu angażować. To pokazuje, że robot może zarówno odkrywać indywidualne style kontroli, jak i delikatnie je korygować, na przykład prosząc użytkowników o większe zaangażowanie w jednej fazie treningu i mniejsze w innej.
Co to oznacza dla rehabilitacji i pracy
Dla laika kluczowy przekaz jest taki, że ten regulator sprawia, iż roboty zachowują się bardziej jak mądrzy partnerzy niż sztywne maszyny. Przewidując, jak zamierzamy się poruszyć, i dostosowując stopień pomocy, roboty mogą zmniejszać nasz wysiłek, gdy to konieczne, zachęcać nas do większego wysiłku, gdy to korzystne, oraz utrzymywać ruchy dokładne i stabilne. Ten sam matematyczny schemat można dostroić do rehabilitacji — stopniowo przesuwając wysiłek z robota na pacjenta — albo do współpracy w produkcji, gdzie ludzie i roboty bezpiecznie i efektywnie współdzielą obciążenia. W istocie badanie pokazuje, że ludzie naturalnie adaptują się do robota, który „gra tę samą grę”, otwierając drogę do bardziej spersonalizowanych, ukierunkowanych form interaktywnej pomocy.
Cytowanie: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
Słowa kluczowe: interakcja człowiek-robot, wsparcie egzoszkieletu, sterowanie w ujęciu teorii gier, rehabilitacja motoryczna, sterowanie współdzielone