Clear Sky Science · pl
Syntetyczne śledzenie i sterowanie miniaturowymi urządzeniami medycznymi napędzane przez promieniowanie rentgenowskie
Mniejsze narzędzia, bezpieczniejsze operacje
Chirurdzy zaczynają korzystać z maleńkich, bezprzewodowych narzędzi medycznych, które potrafią pełzać przez naczynia krwionośne i inne wąskie kanały, by dostarczać leki, udrożniać zatkane tętnice lub mierzyć sygnały życiowe głęboko wewnątrz ciała. Te miniaturowe urządzenia obiecują mniej inwazyjne zabiegi i szybszą rekonwalescencję — pod warunkiem że lekarze będą w stanie obserwować je i sterować nimi bezpiecznie w czasie rzeczywistym. Artykuł przedstawia MicroSyn-X, nową metodę szkolenia systemów komputerowych do śledzenia tych maleńkich urządzeń na obrazach rentgenowskich, torując drogę do precyzyjniejszych i mniej inwazyjnych operacji.
Problem niewidocznych pomocników
Obecnie narzędziem pracy w obrazowaniu chirurgicznym jest fluoroskopia rentgenowska, która pokazuje ruchome cienie kości, naczyń i narzędzi na ekranie. Miniaturowe urządzenia są jednak tak małe i słabe, że często zlewają się z zaszumionym tłem. Mogą być zasłonięte przez kości, metalowe narzędzia lub środki kontrastowe, a miękkie lub ciekłe roboty ciągle zmieniają kształt w czasie ruchu. Operatorzy ludzie muszą uważnie śledzić ekran i ręcznie dostosowywać magnesy lub cewniki — to powolny i męczący proces sprzyjający błędom. Szkolenie systemów widzenia komputerowego — oprogramowania, które potrafi „widzieć” samodzielnie — mogłoby pomóc, ale zwykle wymaga ogromnych zbiorów starannie oznakowanych obrazów. Dla tych nowych urządzeń takie zbiory prawie nie istnieją, ponieważ ich gromadzenie jest kosztowne, czasochłonne i ograniczone przez prywatność pacjentów.
Nauka komputerów na fałszywych, lecz wiernych rentgenach
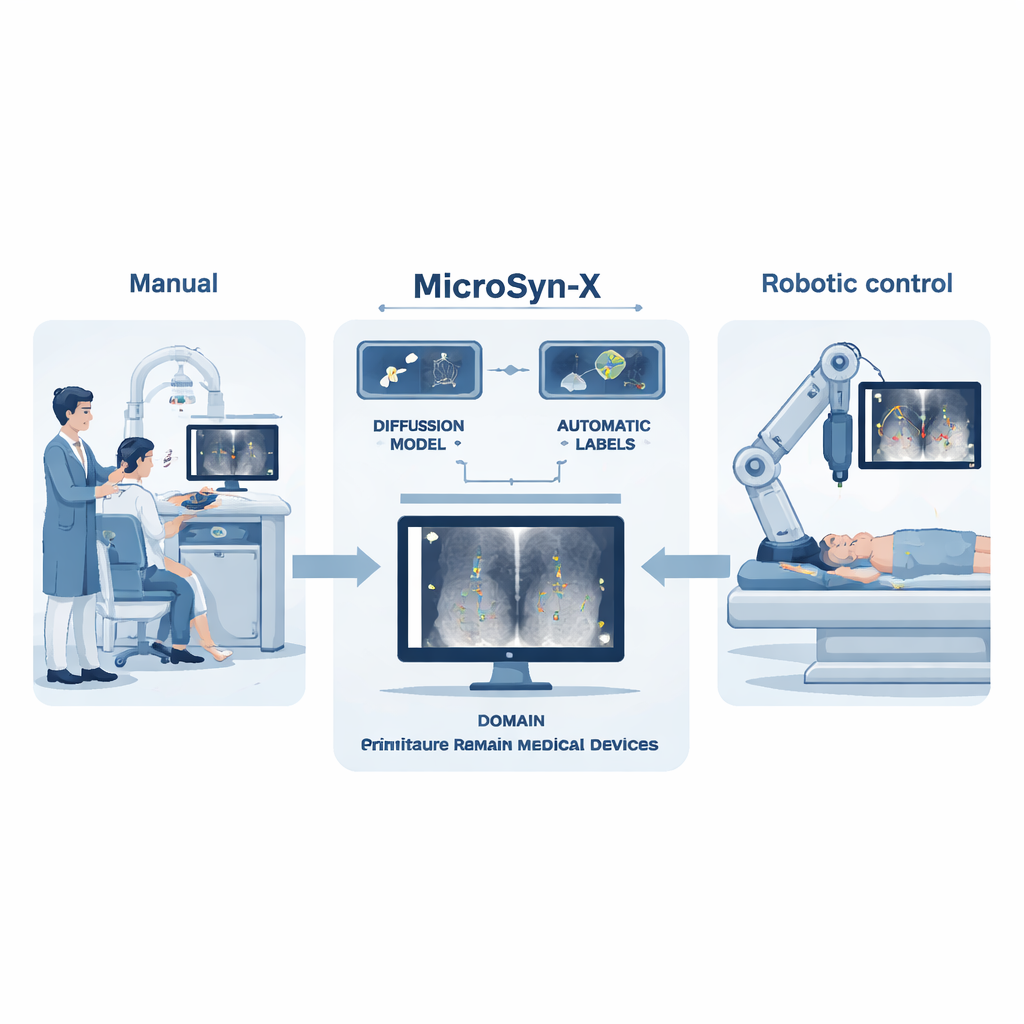
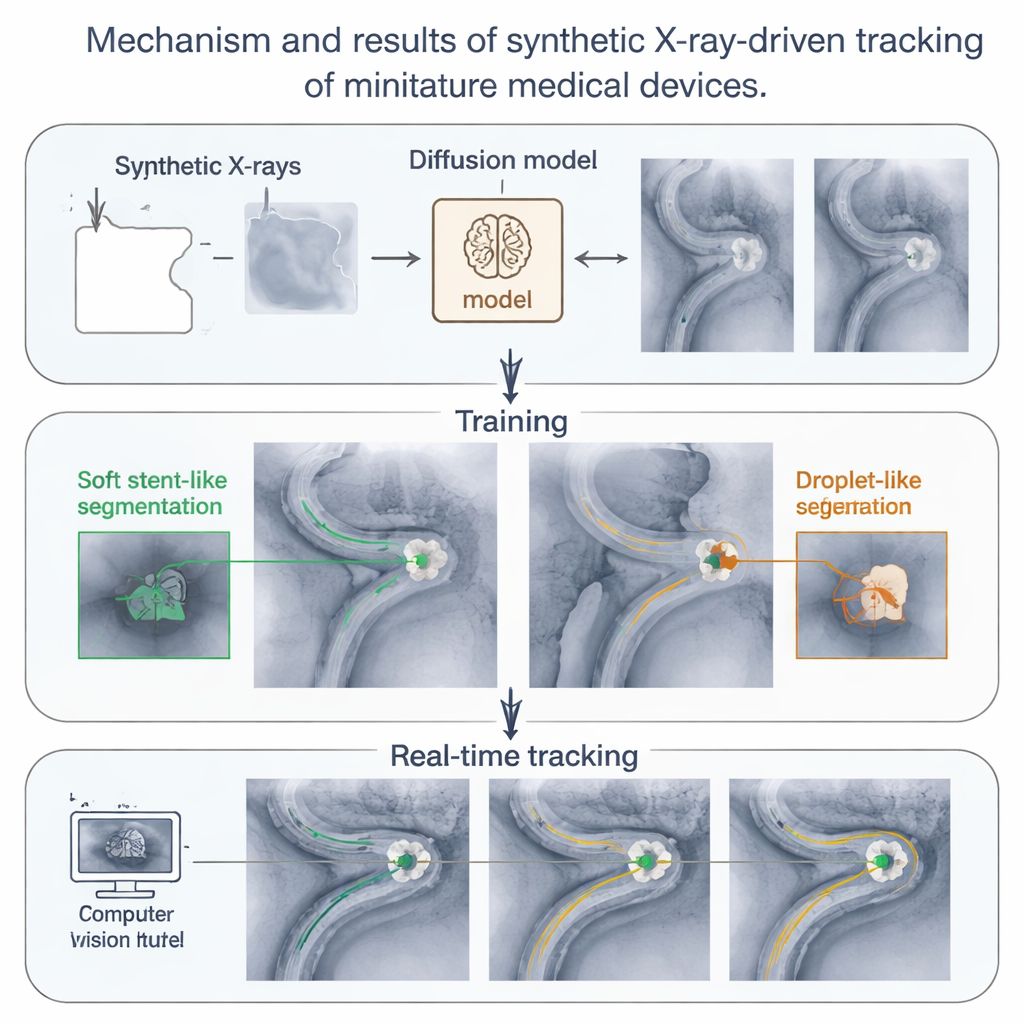
MicroSyn-X rozwiązuje ten problem z danymi, tworząc własne, wysoce realistyczne obrazy rentgenowskie, wyposażone w osadzone etykiety, które dokładnie informują algorytm uczący, gdzie znajduje się każde urządzenie. Najpierw system wykorzystuje nowoczesny generator obrazów zwany modelem dyfuzyjnym do tworzenia realistycznych teł rentgenowskich przedstawiających narządy, kości i narzędzia chirurgiczne, kierowany prostymi poleceniami i zgrubnymi maskami wyznaczającymi tkanki, metal i kanały wypełnione płynem. Następnie obrazy miniaturowych urządzeń — albo sfotografowanych raz na czystym tle, albo matematycznie opisanych dla ciekłych kropli — są cyfrowo wtapiane w te sceny tak, by wyglądały, jakby rzeczywiście znajdowały się wewnątrz ciała. Ponieważ komputer dokładnie wie, gdzie każde urządzenie zostało umieszczone, automatycznie generuje precyzyjne kontury i ramki ograniczające, eliminując mozolne ręczne oznaczanie.
Przygotowanie do rzeczywistości poprzez kontrolowany chaos
Kluczową innowacją MicroSyn-X jest „randomizacja domeny”, celowe wprowadzenie różnorodności do obrazów syntetycznych. System automatycznie zmienia kształty narządów, pozycje urządzeń, jasność, poziom szumów, a nawet stopień zasłonięcia urządzeń przez kości lub narzędzia. Tworzy też wiele różnych form dla robotów ciekłych, które mogą się rozciągać, rozdzielać na stada i ponownie łączyć. Konfrontując algorytm uczący z tysiącami nieco odmiennych sytuacji — wieloma rzadkimi lub niepraktycznymi do uchwycenia u prawdziwych pacjentów — autorzy szkolą modele, które skupiają się na istotnych wskazówkach wizualnych urządzeń, zamiast na powierzchownych wzorcach. Testy pokazują, że modele trenowane wyłącznie na tych syntetycznych obrazach mogą dorównać lub przewyższać modele uczone na prawdziwych rentgenach, szczególnie w trudnych przypadkach o niskim kontraście, wysokim szumie lub silnym zacienieniu.
Od ekranu komputera do robota na sali operacyjnej
Naukowcy poszli dalej niż demonstracje programowe i połączyli MicroSyn-X bezpośrednio z systemem robotycznym. Ramię robota utrzymuje silny magnes przy tkance, podczas gdy fluoroskop typu C-arm rejestruje obrazy rentgenowskie. Model wizji wytrenowany przez MicroSyn-X odnajduje miękkie, przypominające stenty roboty i ciekłe krople w każdej klatce, a algorytm śledzący skleja te wykrycia w gładkie trajektorie, nawet gdy urządzenia na krótko znikają za kością. Wykorzystując tę informację zwrotną, robot prowadzi urządzenia przez kręte sztuczne naczynia, rzeczywiste narządy zwierząt poza ciałem oraz żywe tętnice u królików i szczurów. System skutecznie steruje wieloma urządzeniami jednocześnie, śledzi je w rozwidleniach naczyń i monitoruje stada ciekłych kropli, które dzielą się i łączą pod kontrolą magnetyczną — wszystko w czasie rzeczywistym w trudnych warunkach obrazowania.
W kierunku mądrzejszej, mniej inwazyjnej opieki
Mówiąc prosto, praca ta pokazuje, że komputery mogą nauczyć się bezpiecznie śledzić maleńkie narzędzia chirurgiczne wewnątrz ciała, trenując się na ogromnych bibliotekach starannie skonstruowanych „fałszywych” obrazów rentgenowskich zamiast na skąpych zbiorach prawdziwych danych. MicroSyn-X przekształca obrazowanie syntetyczne w praktyczny silnik dla robotyki: tworzy realistyczne dane treningowe, szkoli modele widzenia i przekazuje ich wyniki do systemu nawigacji magnetycznej, który już zadziałał na żywych zwierzętach. W miarę jak te metody dojrzewają i będą testowane w bardziej złożonych przypadkach, mogą pomóc chirurgom wykonywać delikatne zabiegi z większą precyzją i mniejszym obciążeniem, przybliżając nas do przyszłości, w której stada miniaturowych robotów dyskretnie poprawiają leczenie od wewnątrz.
Cytowanie: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
Słowa kluczowe: miniaturowe urządzenia medyczne, obrazowanie rentgenowskie, dane syntetyczne, robotyka medyczna, widzenie komputerowe