Clear Sky Science · pl
System wieloetapowego filtrowania Kalmana do fuzji sensorów zintegrowany z memtranzystorem MoS2 oferującym 1024 poziomy przewodności
Mądrzejsze postrzeganie dla bezpieczniejszych samochodów autonomicznych
Nowoczesne samochody autonomiczne polegają na wielu sensorach, aby rozumieć otoczenie, jednak szybkie i efektywne scalanie tych informacji jest wyjątkowo trudne. W tym badaniu pokazano, jak nowy typ miniaturowego urządzenia elektronicznego, zwany memtranzystorem, może przyspieszyć i uprościć proces łączenia danych, znany jako fuzja sensorów. Przenosząc kluczowe obliczenia z masywnych układów cyfrowych do oszczędnego sprzętu analogowego, badacze znacząco zmniejszyli zarówno zużycie energii, jak i opóźnienia, co wskazuje na bezpieczniejsze, bardziej responsywne systemy autonomiczne zdolne radzić sobie z niekorzystną pogodą, zasłoniętymi widokami i zatłoczonymi ulicami.
Dlaczego wiele oczu jest lepsze niż jedno
Na dzisiejszych torach testowych i autostradach pojazdy autonomiczne obserwują świat za pomocą mieszanki kamer, lidarów (laserowego pomiaru odległości), radarów milimetrowych i czujników ruchu śledzących własne przemieszczenie. Każdy z tych systemów ma swoje mocne i słabe strony: lidar może być zasłonięty przez ciężarówki lub budynki, radar ma trudności z drobnymi szczegółami, a czujniki ruchu same z czasem dryfują od prawdy. Aby uzyskać wiarygodny obraz ruchu wokół pojazdu, trzeba połączyć te niedoskonałe obrazy w jeden spójny oszacowanie położenia i ruchu obiektów. Narzędzie matematyczne zwane filtrem Kalmana stało się tu podstawą pracy w czasie rzeczywistym, lecz w tradycyjnej formie działa na procesorach cyfrowych, które zużywają energię i wprowadzają opóźnienia, gdy wielokrotnie przenoszą dane między czujnikami analogowymi a logiką cyfrową.

Nowy rodzaj elementu elektronicznego
Zespół podchodzi do tego problemu, wykorzystując urządzenie zbudowane z jednowarstwowego kryształu półprzewodnika siarczku molibdenu (MoS2). Ich memtranzystor łączy funkcje elementu pamięci i tranzystora w jednej, trójterminalowej strukturze, której przewodność elektryczna może być płynnie regulowana i zachowywana nawet po odcięciu zasilania. Poprzez precyzyjne kontrolowanie drobnych wakancji w sieci atomowej materiału za pomocą pól elektrycznych, urządzenie może niezawodnie utrzymywać 1024 odrębne poziomy przewodności na szerokim zakresie i przechowywać je przez ponad rok. Równie istotne jest to, że te poziomy zmieniają się niemal liniowo podczas próbkowania napięcia sterującego, co pozwala odwzorować pożądaną wagę matematyczną w filtrze Kalmana bezpośrednio na fizyczne ustawienie memtranzystora.
Przekształcanie matematyki w sprzęt
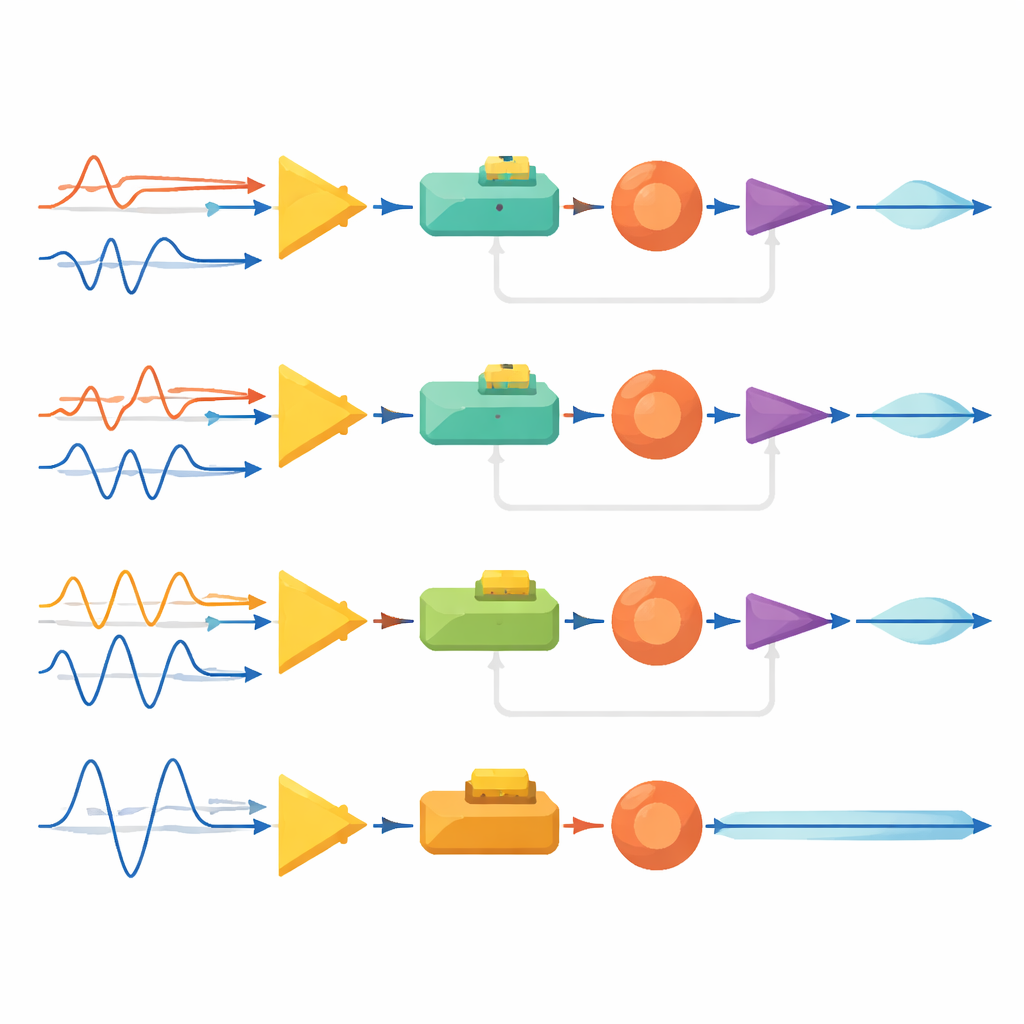
W oparciu o to urządzenie badacze opracowali analogową wersję wieloetapowego filtra Kalmana, która działa bezpośrednio na napięciach z sensorów zamiast na cyfrowych liczbach. Układ składa się z trzech połączonych etapów, które estymują pozycję pojazdu, prędkość i przyspieszenie. W każdym etapie podstawowe operacje, takie jak odejmowanie, całkowanie, dodawanie i różniczkowanie, wykonywane są przez zwarte moduły analogowe. Kluczowy czynnik „wzmocnienia”, który mówi filtrze, ile ufać nowym odczytom sensorów w porównaniu z własnymi predykcjami, jest realizowany przez przewodność memtranzystora. Poprzez proste dopasowanie napięcia bramki, system może płynnie zmieniać, jak mocno słucha lidaru, radaru czy czujników ruchu, bez potrzeby przepisywania oprogramowania.
Sytuacje drogowe i trudne warunki
Aby pokazać działanie w praktyce, zespół zaimplementował pełny trzystopniowy filtr na płytce drukowanej z ich urządzeniami MoS2 i standardowymi komponentami analogowymi. Podali realistyczne, zaszumione sygnały naśladujące to, co lidar, radar i czujniki ruchu zobaczyłyby podczas manewru zmiany pasa przy wyprzedzaniu na autostradzie. W miarę przepływu sygnałów przez kolejne etapy, wyjścia stają się czystsze, dając spójne oszacowania pozycji, prędkości i przyspieszenia, jednocześnie zachowując ostre zmiany istotne dla bezpieczeństwa, takie jak nagłe hamowanie. System jest szczególnie imponujący, gdy jeden sensor staje się zawodny lub zasłonięty — na przykład gdy ciężarówka tymczasowo zasłania inny pojazd przed lidarem. Poprzez obniżenie wzmocnienia związanego z uszkodzonym sensorem w sprzęcie, filtr analogowy automatycznie przesuwa zaufanie na pozostałe wejścia i wcześniejsze wzorce ruchu, utrzymując płynne i fizycznie rozsądne oszacowania prędkości i przyspieszenia.
Szybsze, bardziej oszczędne „mózgi” dla maszyn
W porównaniu ze standardową cyfrową implementacją tego samego zadania filtrującego, analogowy system oparty na memtranzystorach zużywa około 13 razy mniej energii i wykonuje obliczenia około 59 razy szybciej, jednocześnie obsługując trzy kluczowe zmienne ruchu naraz. Ponieważ urządzenia są kompaktowe, stabilne i kompatybilne z produkcją na dużą skalę, podejście to wskazuje na przyszłe bloki przetwarzania „w-sensorze” lub „blisko-sensora”, które można umieścić blisko kamer i radarów w samochodach, dronach i innych połączonych maszynach. Dla osób niebędących specjalistami wniosek jest taki, że pozwalając fizyce zaawansowanych materiałów wykonywać część matematyki, inżynierowie mogą tworzyć mądrzejsze, szybsze i bardziej efektywne elektroniczne „mózgi”, które pomagają systemom autonomicznym nawigować niezawodnie nawet wtedy, gdy obraz świata jest daleki od doskonałego.
Cytowanie: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
Słowa kluczowe: autonomiczna jazda, fuzja sensorów, filtr Kalmana, memtranzystor, obliczenia analogowe