Clear Sky Science · pl
Iloczynowe oszacowanie jądra rozmycia na podstawie znaków drogowych z wykorzystaniem skośnej krawędziowej odpowiedzi częstotliwościowej jako miary ostrości
Dlaczego rozmyte kamery w samochodach mają znaczenie
Współczesne samochody coraz częściej polegają na kamerach do wykrywania pieszych, odczytu znaków drogowych i utrzymania pojazdu w pasie ruchu. Jednak podobnie jak wzrok człowieka, widzenie kamerowe może stopniowo się pogarszać z upływem czasu wskutek temperatury, drgań czy drobnych przesunięć montażowych. W artykule przedstawiono nowy sposób „pomiaru” stopnia rozmycia kamery samochodowej, opierający się na analizie zwykłych znaków drogowych — co może pozwolić producentom na monitorowanie stanu kamer w czasie, zamiast czekać na awarie.
Przekształcanie znaków drogowych w tablice testowe
W fabrykach ostrość kamery sprawdza się na specjalnych wzorcach testowych przed wysyłką jednostki. Na drodze nie ma jednak tak kontrolowanego celu — jest tylko świat rzeczywisty. Autorzy wykorzystują jeden powszechny, powtarzalny obiekt w tym świecie: znaki drogowe z czystymi, wysokokontrastowymi krawędziami. Koncentrują się na standardowej miarze ostrości zwanej odpowiedzią częstotliwościową przestrzenną (SFR), która w praktyce mówi, jak dobrze kamera zachowuje drobne detale obrazu. Analizując nieco nachylone („skośne”) krawędzie na znakach drogowych, można obliczyć SFR podobnie do testów laboratoryjnych, ale bezpośrednio z rzeczywistych scen drogowych.

Rejestrowanie, jak obiektyw rozprowadza światło
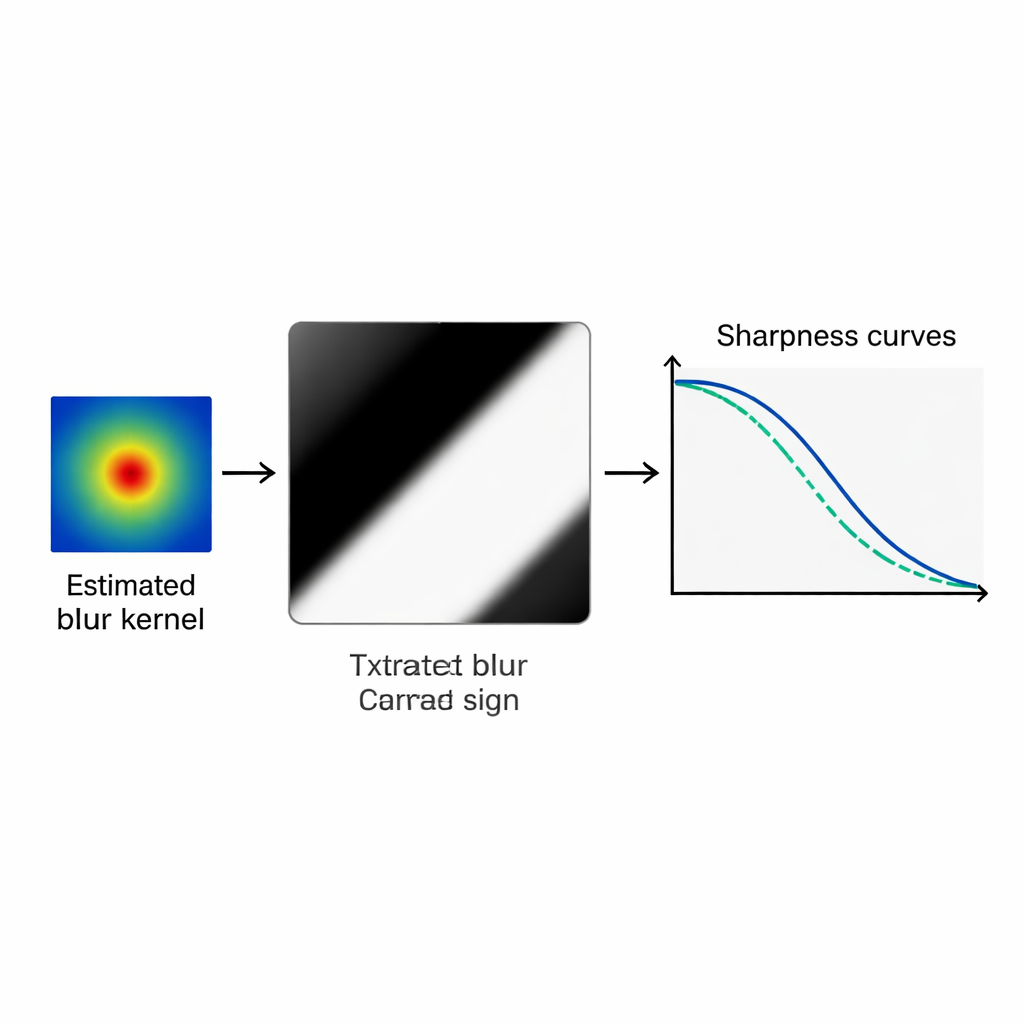
Rozmycie w kamerze można opisać za pomocą małego obrazu zwanego jądrem rozmycia lub funkcją rozpraszania punktu. Pokazuje on, jak światło z pojedynczego punktu sceny rozkłada się na sąsiednich pikselach sensora. Bezpośrednie oszacowanie tego jądra z rozmytego zdjęcia jest zwykle bardzo trudne, ponieważ wiele kombinacji ostrego obrazu i wzoru rozmycia może dawać podobny wynik. Aby to ułatwić, badacze najpierw używają oprogramowania do projektowania optyki, by zasymulować około 1300 realistycznych jąder rozmycia dla konkretnej kamery samochodowej przy różnych ustawieniach ostrości i pozycjach w obrazie. Następnie kompresują tę dużą kolekcję do zwartego zestawu kluczowych wzorców za pomocą narzędzia statystycznego zwanego analizą głównych składowych (PCA), tak by każde realistyczne rozmycie dało się opisać kilkudziesięcioma liczbami zamiast setkami wartości pikseli.
Porównywanie krzywych ostrości zamiast pikseli
Gdy zbudowany zostanie zwarty „słownik” jąder rozmycia, proces estymacji zaczyna się od dwóch małych fragmentów, każdy o rozmiarze 45 × 45 pikseli, wyciętych z rozmytego obrazu znaku drogowego, razem z pasującymi fragmentami ze wzorcowego, ostrego zdjęcia tego samego znaku. Dla kandydującego jądra rozmycia pobranego z modelu PCA, ostre fragmenty są sztucznie rozmywane, a następnie obliczane są ich krzywe SFR. Krzywe te porównuje się z krzywymi SFR zmierzonymi z rzeczywistych rozmytych fragmentów. Metoda optymalizacji globalnej znana jako ewolucja różnicowa dostosowuje parametry jądra, by zminimalizować różnicę między obiema grupami krzywych. W efekcie algorytm poszukuje wzoru rozmycia, który sprawia, że syntetyczne krzywe ostrości jak najściślej pokrywają się z tymi zmierzonymi z rzeczywistego obrazu kamery.
Jak dobrze działa ta metoda?
Autorzy najpierw testują swoją metodę na danych syntetycznych, gdzie znane są dokładne jądra rozmycia. W dziesięciu różnych poziomach rozmycia, od bardzo ostrych po wyraźnie nieostre, oszacowane jądra pokrywają się z prawdą gruntu według kilku niezależnych miar podobieństwa — wartości strukturalnego podobieństwa typowo przekraczają 0,95, a średnie błędy są bardzo niskie. Porównują także swoje podejście z niedawnymi, zaawansowanymi technikami „ślepego odszumiania” z dziedziny widzenia komputerowego, które zwykle mają na celu poprawę wyglądu obrazów, a nie odtworzenie dokładnego kształtu rozmycia. W zadaniu wiernego rekonstruowania jądra dla tej konkretnej kamery, metoda oparta na PCA wyraźnie przewyższa te metody odniesienia. Wreszcie stosują algorytm do rzeczywistych obrazów z zmodyfikowanej kamery samochodowej, której sensor można przesuwać w drobnych krokach, by wprowadzić znane rozogniskowanie. Choć tu prawdziwe jądra rozmycia nie są dostępne, oszacowane jądra generują syntetyczne krawędzie, których krzywe ostrości i wygląd wizualny pozostają bardzo zbliżone do rzeczywistych rozmytych krawędzi w szerokim zakresie ustawień ostrości.
Od techniki laboratoryjnej do kontroli stanu kamery
Dla niespecjalistów głównym wynikiem jest to, że autorzy potrafią zamienić zwykłe znaki drogowe w narzędzie diagnostyczne ujawniające, jak optyka kamery samochodowej zmienia się z upływem czasu — i nie tylko stwierdzić, czy obraz wygląda na ostry czy miękki. Zamiast pojedynczej liczby „zaliczone/oblał”, oszacowane jądro rozmycia koduje szczegółowe informacje o tym, jak światło rozkłada się wewnątrz obiektywu, co z kolei można powiązać z rozogniskowaniem lub konkretnymi wadami optycznymi. Choć obecna metoda jest obliczeniowo wymagająca i działa jedynie na małych fragmentach wokół wyraźnych krawędzi, wskazuje drogę ku przyszłym systemom, w których okazjonalne obrazy wysyłane z pojazdów na serwer śledziłyby stopniowe pogorszenie ostrości kamer. Mogłoby to wspierać konserwację zapobiegawczą, poprawiać bezpieczeństwo zaawansowanych systemów wspomagania kierowcy i w efekcie pomagać zachować „cyfrowe oczy” pojazdów autonomicznych w dobrym stanie przez wiele lat eksploatacji.
Cytowanie: Pandey, A., Akhtar, M.Z., Veettil, N.K. et al. Quantitative Kernel estimation from traffic signs using slanted edge spatial frequency response as a sharpness metric. Sci Rep 16, 7387 (2026). https://doi.org/10.1038/s41598-026-40556-w
Słowa kluczowe: kamery samochodowe, ostrość obrazu, jądro rozmycia, rejestracja znaków drogowych, monitorowanie stanu kamery