Clear Sky Science · pl
Mapowanie semantyczne uwzględniające obiekty z wykorzystaniem funkcji gęstości prawdopodobieństwa do relokalizacji wewnątrz pomieszczeń i planowania ścieżek
Dlaczego inteligentniejsze mapy wewnętrzne są istotne
Gdy roboty domowe i serwisowe wychodzą z laboratoriów do prawdziwych mieszkań, muszą robić znacznie więcej niż unikać ścian i mebli. Aby być naprawdę użytecznym, robot powinien rozumieć, że obecność łóżka zwykle oznacza sypialnię, a lodówka sugeruje kuchnię. W artykule przedstawiono nowy sposób, dzięki któremu roboty mogą „widzieć” wnętrza przez pryzmat obiektów definiujących każde pomieszczenie, co pozwala im określić, gdzie się znajdują, i wybierać trasy lepiej dopasowane do sposobu, w jaki ludzie korzystają z domu.
Postrzeganie pomieszczeń przez ich codzienne przedmioty
Tradycyjne mapy robotów koncentrują się albo na surowej geometrii, albo na abstrakcyjnych symbolach. Mapy siatkowe zbudowane z pomiarów laserowych odzwierciedlają szczegółowe kształty, ale stają się ciężkie do przechowywania i wolne w przeszukiwaniu, a także mogą zmuszać roboty do poruszania się „sztywnymi”, siatkowymi ścieżkami. Wysokopoziomowe grafy pomieszczeń i drzwi są łatwiejsze w obsłudze, lecz tracą drobne detale potrzebne do precyzyjnej jazdy. Autorzy zacierają tę przepaść, organizując mapy wokół pomieszczeń i kluczowych, statycznych obiektów w nich — łóżek, sof, lodówek, stołów i podobnych. Każde pomieszczenie jest zaznaczone na płaskim planie, a każda istotna klasa obiektów otrzymuje własną warstwę, dzięki czemu różne rodzaje mebli nie nadpisują się nawzajem.
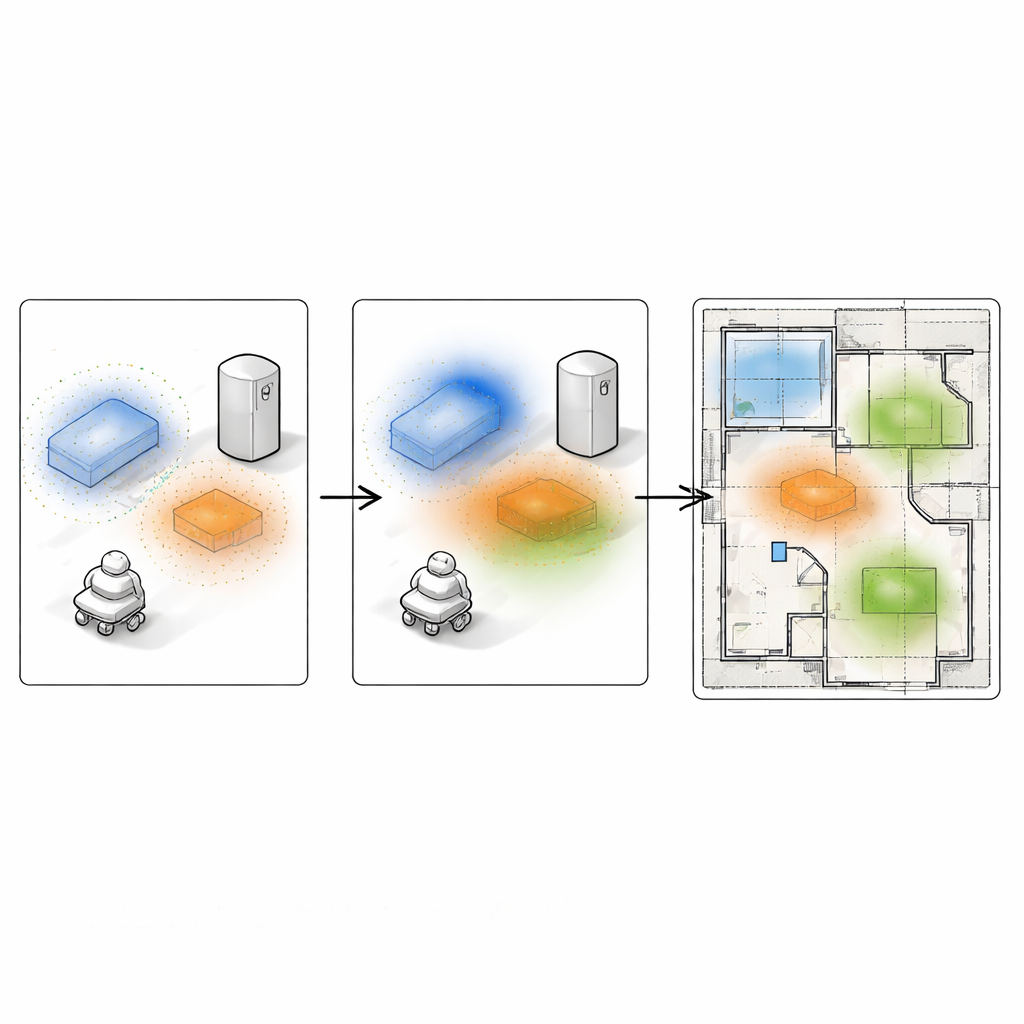
Przekształcanie mebli w miękkie chmury prawdopodobieństwa
Zamiast rysować każdy obiekt jako ostrokrawędzistą skrzynię, metoda konwertuje skany 3D mebli na gładkie „mapy cieplne” na podłodze. Robot najpierw rekonstruuje każde pomieszczenie w 3D przy użyciu kamery RGB‑D i standardowych narzędzi, a następnie semantycznie oznacza punkty należące do obiektów takich jak ściany, łóżka czy krzesła. Dla każdego typu obiektu w pomieszczeniu odnajdywane są klastry punktów, które są rzutowane na podłogę. Z tych klastrów system estymuje ciągłą gęstość prawdopodobieństwa — miękki „kleks”, który ma najwyższą wartość tam, gdzie obiekt najpewniej się znajduje, i łagodnie zanika w kierunku zewnątrz. Nakładanie takich kleksów per typ obiektu daje zwarty, warstwowy plan, który zachowuje zarówno znaczenie obiektów, jak i ich przybliżony kształt, jednocześnie naturalnie radząc sobie z szumem i częściowymi widokami.
Pozwalanie robotom na odnalezienie się
Jednym z głównych zastosowań mapy skoncentrowanej na obiektach jest pomoc robotowi w ponownym ustaleniu swojej pozycji, gdy nie ma pojęcia, gdzie znajduje się na planie — częsty problem, gdy robot się budzi lub został przestawiony. Robot wykonuje świeże zdjęcie kamerą głębi, wykrywa widoczne obiekty i tworzy własny niewielki zestaw chmurek prawdopodobieństwa dla tego fragmentarycznego widoku. Następnie algorytm ewolucyjnego przeszukiwania bada wiele możliwych pozycji robota w całej mapie budynku. Dla każdego kandydata lokalne chmurki nakłada się na mapę globalną i mierzy ich podobieństwo za pomocą metryki statystycznej. Granice pomieszczeń i sprawdzenia widoczności wykluczają niemożliwe pozycje, np. wykrycie lodówki „przez” ścianę. Wiele generacji sprawia, że populacja kandydatów zmierza do pozycji, gdzie obserwowane obiekty najlepiej pasują do zapisanych pól prawdopodobieństwa, dając solidne oszacowanie pozycji i orientacji robota.
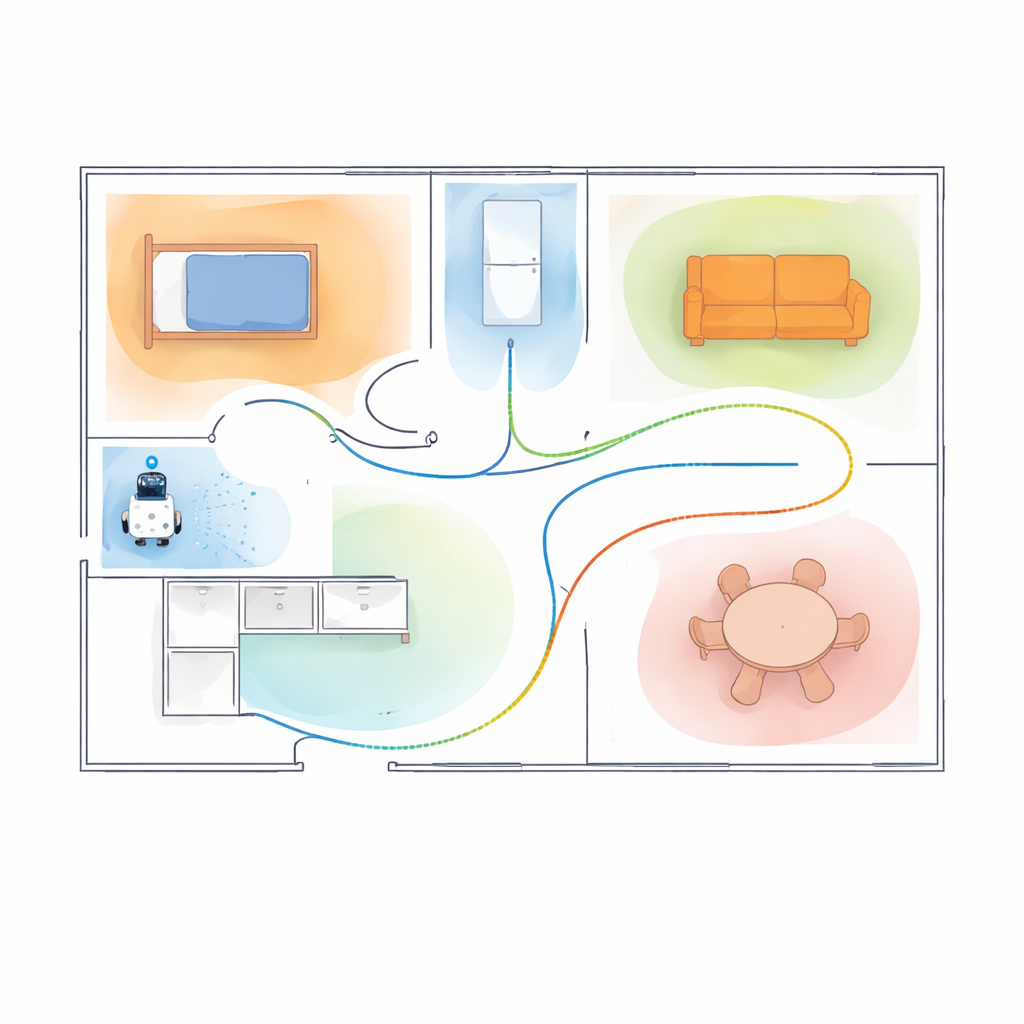
Planowanie ścieżek zgodnych z tym, jak ludzie używają przestrzeni
Ta sama mapa kieruje również ruchem robota. Ponieważ każdy typ obiektu reprezentowany jest jako gładkie pole wpływu, robotowi można nadać preferencje unikania lub faworyzowania pewnych obszarów przez regulację wag liczbowych. Łóżka mogą stać się obszarami, których należy unikać w nocy, podczas gdy stoły mogą przyciągać, gdy robot szuka przedmiotów. Te semantyczne preferencje łączy się ze standardową mapą przeszkód oraz marginesem bezpieczeństwa wokół ścian, tworząc pojedynczy krajobraz kosztów na planie podłogi. Klasyczny planer ścieżek znajduje wówczas trasy, które nie tylko unikają kolizji, ale także realizują pożądane społeczne lub zadaniowe skłonności. Eksperymenty na realistycznym zbiorze danych i w prawdziwym umeblowanym mieszkaniu pokazują, że takie semantycznie nacechowane ścieżki lepiej odpowiadają zamierzonym preferencjom, czasem kosztem niewielkiego wydłużenia trasy, i mogą być bardziej płynne w rzeczywistych domach.
Co to oznacza dla codziennych robotów
Mówiąc prosto, praca ta uczy roboty myśleć o domach tak, jak ludzie: jako o pomieszczeniach definiowanych przez ich meble, a nie tylko pustych pudełkach ze ścianami. Owijając każdy kluczowy obiekt w miękką chmurę prawdopodobieństwa, jedna zwarta mapa może wspierać zarówno „Gdzie jestem?”, jak i „Jak powinienem tam dotrzeć?” bez potrzeby oddzielnych modeli dla poszczególnych zadań. Testy wykazują, że podejście to pomaga robotom lokalizować się bardziej niezawodnie w zagraconych lub podobnych do siebie pomieszczeniach oraz wybierać trasy lepiej odpowiadające oczekiwaniom ludzi. W miarę dojrzewania tych pomysłów przyszłe roboty domowe mogą poruszać się uprzejmiej i inteligentniej, przemieszczając się po naszych przestrzeniach z świadomością, która wydaje się znacznie mniej mechaniczna.
Cytowanie: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
Słowa kluczowe: lokalizacja robota wewnątrz pomieszczeń, mapowanie semantyczne, nawigacja z uwzględnieniem obiektów, probabilistyczne mapy robotyczne, planowanie ścieżek