Clear Sky Science · pl
Głębokie probabilistyczne przejezdności z adaptacją w czasie testu dla nawigacji łazika planetarnego świadomej niepewności
Dlaczego bezpieczniejsza jazda łazika ma znaczenie
Kiedy wysyłamy roboty kołowe na Księżyc lub Marsa, muszą przejeżdżać przez piasek, skały i pochyłości bez pomocy człowieka. Jedno błędne założenie o miękkości podłoża może na stałe unieruchomić łazik wart miliardy dolarów — tak jak stało się, gdy łazik Opportunity ugrzązł na falistym piasku na tygodnie. W tym badaniu wprowadzono nowy sposób, aby łaziki „wyczuwały”, jak ryzykowne jest podłoże przed nimi, podejmowały bezpieczniejsze decyzje dotyczące trasy i nawet uczyły się na własnych błędach w trakcie jazdy.
Miękkie podłoże jako ukryte niebezpieczeństwo
Na innych światach najgroźniejsze przeszkody nie zawsze są blokami skalnymi czy urwiskami, które kamery łatwo dostrzegają, lecz pozornie gładkimi łachami sypkiego gruntu. Gdy koła łazika kręcą się na tego rodzaju terenie, pojazd ślizga się, porusza się znacznie wolniej niż nakazuje komenda, marnuje energię i może zostać trwale unieruchomiony. Tradycyjne systemy nawigacji skupiają się głównie na widocznych zagrożeniach geometrycznych — co wygląda jak przeszkoda, a co nie — nie oddając w pełni, jak podłoże zachowa się pod kołami. Jednocześnie metody uczenia maszynowego próbujące przewidywać poślizg kół na podstawie obrazów i map 3D mogą mylić się w nieznanych warunkach, takich jak nowe oświetlenie czy większe nachylenia, i zwykle nie informują o niepewności swoich przewidywań.
Nauczanie łazika rozumowania o ryzyku
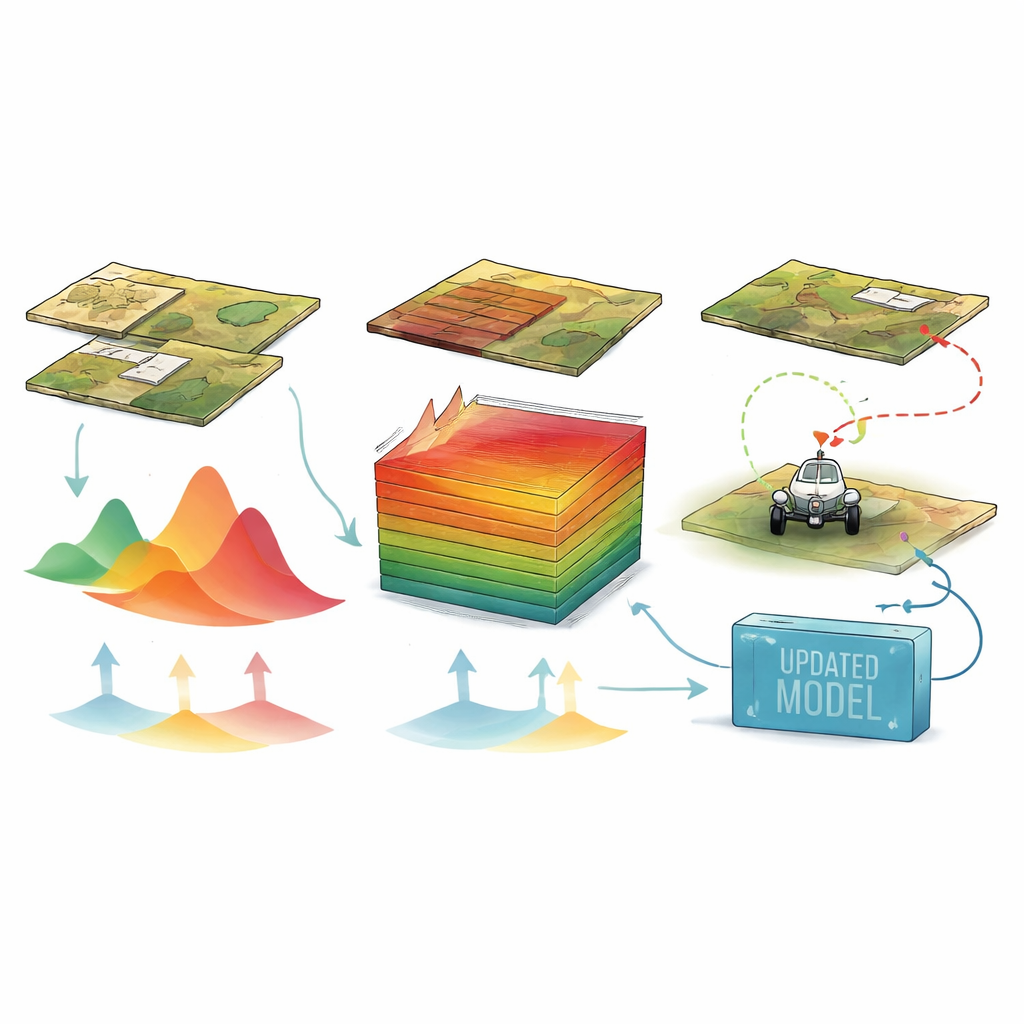
Autorzy proponują zintegrowane ramy uczenia i planowania, które nazywają głęboką probabilistyczną przejezdnością. Zamiast generować pojedyncze „najlepsze przypuszczenie” dotyczące poślizgu kół na każdym fragmencie terenu, ich model przewiduje pełne rozkłady prawdopodobieństwa możliwych poślizgów, bazując na obrazach kolorowych i lokalnym nachyleniu. Zespół sieci neuronowych ogląda krajobraz z góry i dla każdego możliwego ruchu na siatce wyprowadza zarówno oczekiwaną wartość poślizgu, jak i jej niepewność. Z tego rozkładu system tłumaczy poślizg na efektywną prędkość jazdy i ostatecznie na koszt czasu przejazdu dla każdego kroku. Obszary, w których łazik prawdopodobnie ugrzęźnie, otrzymują bardzo wysokie koszty; obszary, gdzie przewidywanie jest korzystne i pewne, mają niskie koszty. Standardowy algorytm wyszukiwania ścieżki znajduje trasę kompromisującą krótszy dystans z niskim ryzykiem unieruchomienia.
Pozwalając łazikowi uczyć się w trakcie jazdy
Głównym wyzwaniem w eksploracji planetarnej jest to, że warunki, które napotyka łazik po przybyciu, mogą znacząco różnić się od danych treningowych: nachylenia mogą być większe, właściwości gleby nieznane, a oświetlenie bardzo odmienione. Aby sobie z tym poradzić, ramy obejmują mechanizm adaptacji w czasie testu. Gdy łazik jedzie, mierzy rzeczywisty poślizg, którego doświadcza. Po każdym krótkim ruchu świeże pomiary są używane do łagodnego dostosowania dodanych warstw „skali i przesunięcia” w sieciach neuronowych przy jednoczesnym utrzymaniu stałych pierwotnych wag. Strategia ta pozwala modelowi szybko dostosować się do nowych terenów przy użyciu zaledwie kilku obserwacji, zachowując jednocześnie to, czego już nauczył się o wcześniej widzianych warunkach. Zaktualizowane przewidywania są następnie ponownie wykorzystywane do przekształcania planu, dzięki czemu wybrana trasa może się poprawiać w locie.
Testowanie systemu w trudnych warunkach
Ponieważ rzeczywiste dane z łazików obejmują tylko ograniczone typy terenu, zespół zbudował dużą syntetyczną bazę danych krajobrazów podobnych do marsjańskich. Połączyli komputerowo generowaną surową topografię z dziesięcioma ukrytymi klasami terenu, z których każda ma własny kolor i zachowanie poślizgu, oraz zmieniali stromość zboczy i kierunek oświetlenia, aby stworzyć znane i nieznane scenariusze. W tysiącach symulowanych misji nowa metoda została porównana z dwoma nowoczesnymi planerami, które albo ignorują niepewność, albo wykorzystują ją mniej bezpośrednio. W znanych warunkach wszystkie podejścia działały podobnie. Ale w najbardziej wymagających przypadkach — przy ciemnym oświetleniu i stromym, krateropodobnym terenie — podejście głębokiej probabilistycznej przejezdności osiągnęło wyższe wskaźniki sukcesu i niższy maksymalny poślizg, przy zachowaniu konkurencyjnych czasów przejazdu. Gdy włączono adaptację w locie, system dodatkowo zmniejszył błędy przewidywań i poprawił bezpieczeństwo, zwłaszcza w środowiskach silnie różniących się od treningowych.
Co to oznacza dla przyszłych misji
Dla ogólnego czytelnika kluczowy przekaz jest taki, że ta praca daje łazikom planetarnym bardziej ostrożny i samoświadomy sposób poruszania się po zdradliwym terenie. Zamiast ślepo ufać pojedynczemu przewidywaniu dotyczącym przyczepności kół, łaziki mogą teraz brać pod uwagę zarówno oczekiwane zachowanie, jak i niepewność, wybierając trasy szybkie, a jednocześnie mało prawdopodobne, by je unieruchomić. Dzięki ciągłemu uczeniu się na podstawie własnych doświadczeń z poślizgiem, mogą dostosowywać się do nowego piasku, nachyleń i oświetlenia bez potrzeby ratunku ludzkiego. W miarę jak agencje kosmiczne planują dłuższe i bardziej ambitne misje powierzchniowe, taka nawigacja świadoma niepewności może pomóc zapewnić, że cenne roboty spędzą więcej czasu na badaniu nowych celów naukowych, a mniej na wydobywaniu się z tarapatów.
Cytowanie: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
Słowa kluczowe: nawigacja łazika planetarnego, przejezdność terenu, planowanie świadome niepewności, uczenie maszynowe w robotyce, autonomiczna eksploracja