Clear Sky Science · pl
InFoRM: zunifikowany model odwrotny i prosty dla sterowania sensomotorycznego
Jak mózg może upraszczać ruch
Za każdym razem, gdy sięgasz po kubek lub stukasz w klawiaturę, twój mózg musi przekształcić zamiar („przesuń rękę tam”) w precyzyjną aktywność mięśni, jednocześnie przewidując, jak ten ruch będzie odczuwany. Klasyczne teorie zakładają, że mózg używa dwóch oddzielnych wewnętrznych kalkulatorów: jednego do generowania poleceń dla mięśni i drugiego do przewidywania nadchodzących odczuć. W tej pracy autorzy badają odważną alternatywę: że pojedynczy, zunifikowany obwód mógłby obsługiwać obie strony problemu — oszczędzając energię i poprawiając wydajność.
Dwa sposoby myślenia o sterowaniu
Tradycyjne modele kontroli ruchu wyobrażają sobie system rozdzielony. Część „odwrotna” konwertuje pożądany rezultat (na przykład trajektorię końcówki palca w przestrzeni) na niezbędne aktywacje mięśni, podczas gdy część „prosta” przewiduje, jak ciało się poruszy i jakie informacje sensoryczne się pojawią. Te dwie części często rysowane są jako oddzielne pudełka w podręcznikach. Jednak badania obrazowe i dane z uszkodzeń mózgu nie wspierają wyraźnie takiego czystego rozdzielenia, a niektóre obszary mózgu wydają się brać udział w obu rolach. Ponadto utrzymywanie dwóch skomplikowanych układów może być kosztowne metabolicznie. Autorzy zatem pytają, czy jedna elastyczna sieć mogłaby nauczyć się generować polecenia motoryczne, przewidywać sprzężenie zwrotne sensoryczne, a nawet wywnioskować pierwotny cel wyłącznie z sygnałów wewnętrznych.
Pojedyncza sieć, która robi wszystko
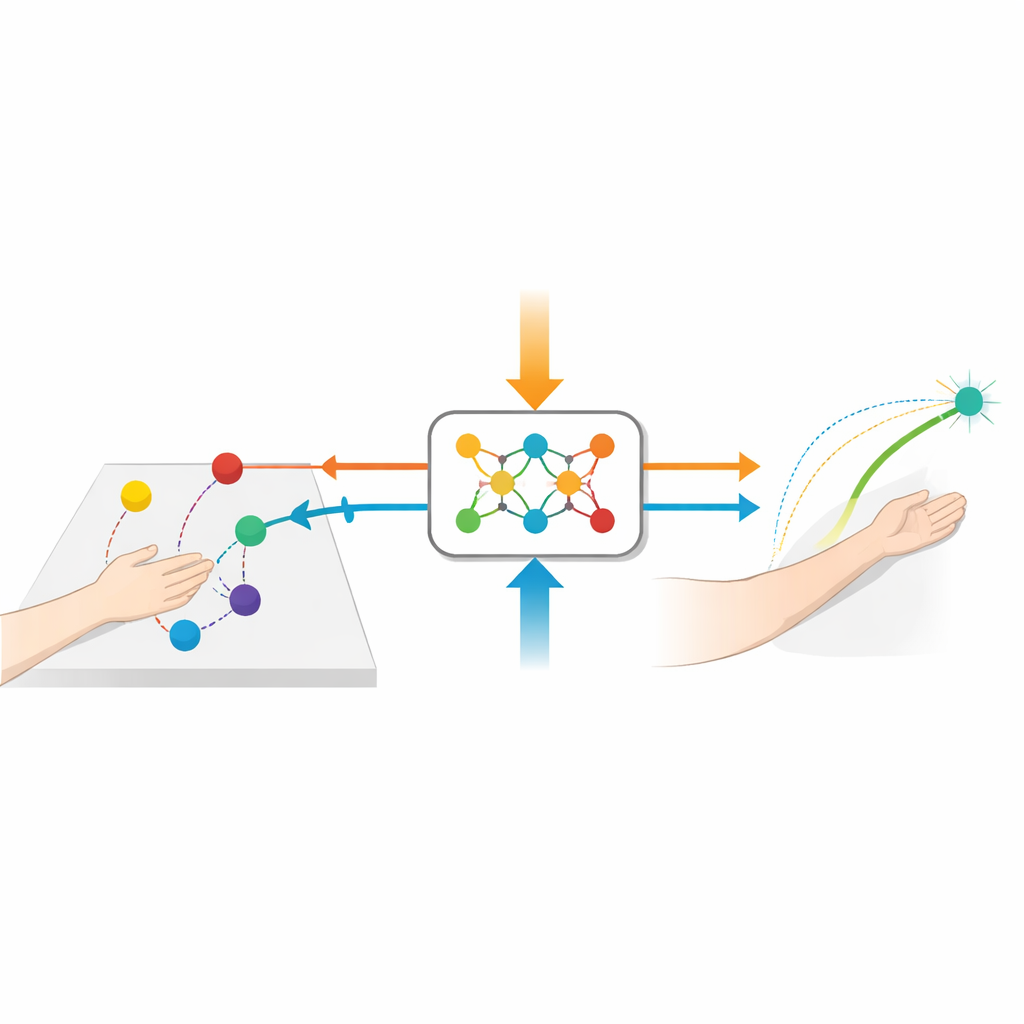
Aby przetestować ten pomysł, badacze zbudowali model obliczeniowy nazwany InFoRM (skrót od inverse–forward–recognition model). Zamiast dwóch nakładających się modułów, InFoRM używa jednej rekurencyjnej sieci neuronowej — sieci połączonych ze sobą jednostek — do której trafiają sygnały celu, mięśni i sensoryczne. Z tego wspólnego „rezerwuaru” aktywności trzy odczyty (readouty) są trenowane równolegle: jeden rekonstruuje pożądaną trajektorię dłoni, drugi generuje aktywacje mięśni potrzebne do jej osiągnięcia, a trzeci przewiduje sygnały sensoryczne (długość i prędkość mięśni), które by nastąpiły. Kluczowe jest to, że te same wewnętrzne dynamiki wspierają jednocześnie wszystkie trzy zadania, więc model może dzielić informacje między nimi zamiast uczyć każdego z osobna.
Test modelu w warunkach rzeczywistych
Zespół rejestrował rzeczywiste ruchy ramion ochotników, którzy rytmicznie sięgali z centralnego punktu do celów rozmieszczonych w różnych kierunkach i odległościach na stole. Dane z systemu śledzenia ruchu i szczegółowy model układu mięśniowo-szkieletowego dostarczyły dla każdego ruchu trajektorii końcówki palca, oszacowanych aktywacji mięśni oraz odpowiadających im sygnałów przypominających sensoryczne sygnały z mięśni. InFoRM był trenowany na podzbiorze kierunków, a następnie testowany w kilku trudnych scenariuszach: powtarzanie wyuczonych ruchów, generowanie ruchów w nowych, pośrednich kierunkach („morfowanie” między tym, czego się nauczył), oraz radzenie sobie z naturalnymi, dowolnie wybieranymi przejściami między celami. Dla porównania autorzy zbudowali także bardziej klasyczne architektury sterowania z oddzielnymi sieciami odwrotną i prostą, oraz ulepszone warianty otrzymujące dodatkowe informacje wejściowe.

Bardziej precyzyjne przewidywania przy mniejszych zasobach
We wszystkich testach zunifikowana sieć InFoRM odtwarzała rejestrowane ruchy i sygnały mięśniowe dokładniej niż jakakolwiek z architektur rozdzielonych. Jej wyjścia podążały za prawdziwymi sygnałami ściślej i z mniejszymi błędami, nawet gdy proszono ją o interpolację do niewyuczonych kierunków lub radzenie sobie z realistycznymi, niescenariuszowymi sekwencjami celów. Co ważne, InFoRM osiągnął tę wyższą dokładność przy użyciu porównywalnej lub mniejszej liczby neuronów i potrzebował znacznie mniej iteracji treningowych, co sugeruje lepszą efektywność obliczeniową. Fakt, że przewyższył też najlepszy rozszerzony model sterowania — ten, który miał dostęp do tej samej kombinacji informacji o celu, motoryce i sensoryce — sugeruje, że przewaga wynika z integrowania wszystkiego w jednym rekurencyjnym obwodzie, a nie tylko z bogatszych wejść.
Co to oznacza dla zrozumienia mózgu
Wyniki wspierają ideę, że mózg może nie utrzymywać wyraźnie rozdzielonych „prostych” i „odwrotnych” silników ruchu. Zamiast tego pojedynczy, gęsto połączony obwód mógłby w sposób implicytny zawierać oba aspekty, a polecenia motoryczne i przewidywania wynikałyby z tych samych podstawowych dynamik. Ta perspektywa dobrze wpisuje się we współczesne spojrzenie na mózg jako maszynę predykcyjną, nieustannie generującą i aktualizującą oczekiwania dotyczące własnego ciała i świata. Chociaż model pozostaje uproszczoną abstrakcją, a biologiczne szczegóły, takie jak opóźnienia nerwowe i zmienne synapsy, wymagają dalszych badań, InFoRM pokazuje, że zunifikowany projekt może być zarówno potężny, jak i ekonomiczny, oferując przekonującą alternatywę dla tego, jak nasz układ nerwowy mógłby kontrolować ruch.
Cytowanie: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
Słowa kluczowe: sterowanie sensomotoryczne, modele wewnętrzne, sieci neuronowe, uczenie motoryczne, przetwarzanie predykcyjne