Clear Sky Science · pl
Od wirtualnego do rzeczywistego: porównanie eksperymentów polowych i symulacji DEM rozsiewacza nawozu z dwoma talerzami
Dlaczego te badania mają znaczenie dla rolników i żywności
Dostarczenie nawozu we właściwe miejsce to cichy filar nowoczesnego rolnictwa. Gdy granulki rozkładają się nierównomiernie, niektóre rośliny pozostają niedożywione, podczas gdy inne są przekarmione — co marnuje pieniądze i zanieczyszcza glebę oraz wodę. Badanie stawia proste, lecz silne pytanie: czy możemy ufać symulacjom komputerowym w przewidywaniu zachowania rzeczywistych rozsiewaczy na polu, tak aby inżynierowie mogli poprawiać maszyny na ekranie, zamiast prowadzić powolne i kosztowne próby polowe?
Od wirujących metalowych talerzy do lecących ziaren
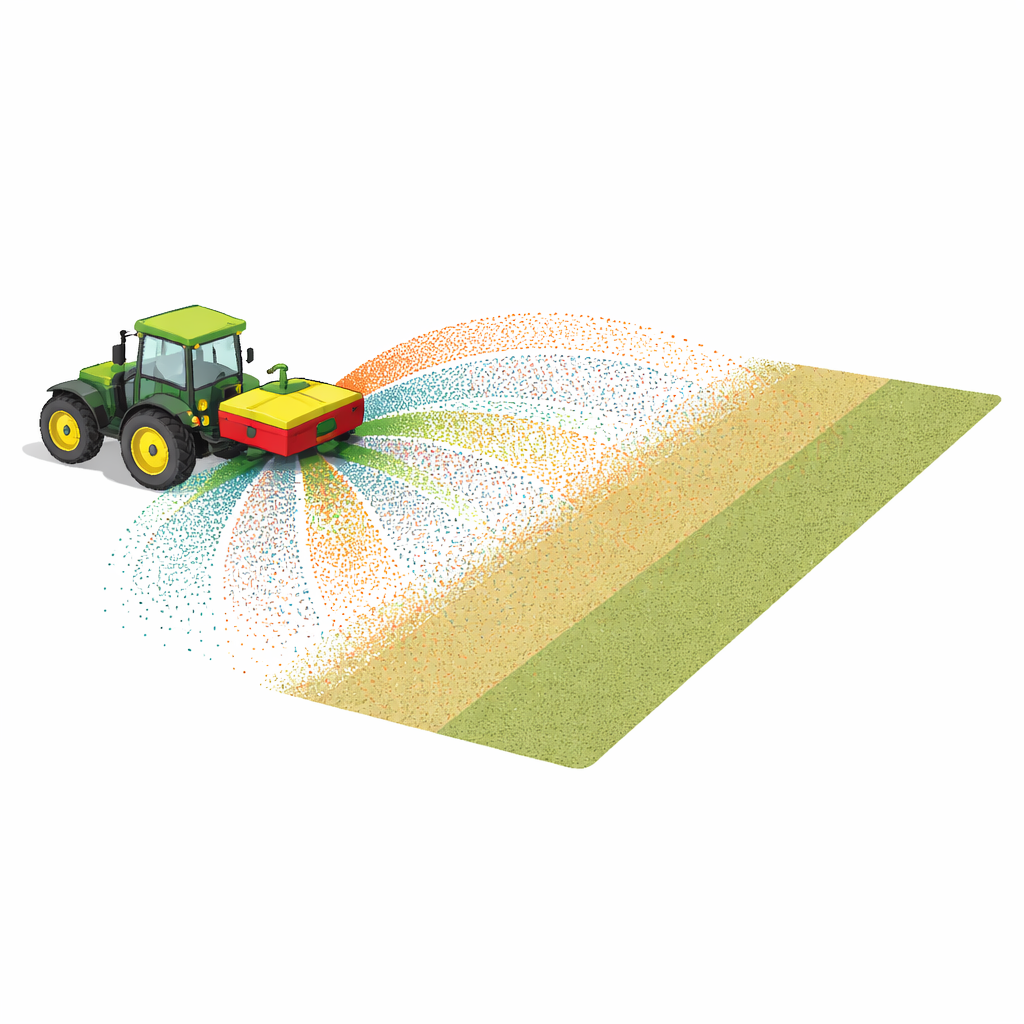
W wielu gospodarstwach podstawową maszyną jest rozsiewacz nawozu z dwoma talerzami, który wyrzuca drobne granulki na szerokie pasy pola. Nawóz spada z zbiornika na dwa wirujące metalowe talerze wyposażone w krótkie łopatki, które wyrzucają cząstki na zewnątrz. Kluczowym wyzwaniem jest uzyskanie gładkiego, równomiernego pasma granulek w poprzek drogi ciągnika, zwanego rozkładem poprzecznym. W badaniu autorzy skupili się na komercyjnym rozsiewaczu ze zbiornikiem 1200 litrów i talerzami ze stali nierdzewnej o średnicy 46 cm, z trzema łopatkami ustawionymi pod konkretnym kątem. Testowali maszynę przy pięciu prędkościach obrotowych talerzy, stosując standardową dawkę nawozu w spokojnych warunkach zewnętrznych zgodnych z międzynarodowymi wytycznymi testowymi.
Pomiary rzeczywistego rozsiewu na polu testowym
Aby dokładnie zobaczyć, gdzie trafił nawóz, zespół ustawił setki pojemników do zbierania w układzie siatki na polu testowym. Gdy ciągnik przejeżdżał stałą prędkością, granulki wpadały do tac, które później ważono na precyzyjnej wadze. Ten układ pozwolił badaczom odwzorować, ile nawozu dotarło do każdej pozycji na szerokości roboczej 16 metrów. Próby polowe są wymagające: potrzebna jest dobra pogoda, staranne przygotowanie i dużo pracy oraz materiału. Dostarczają jednak danych rzeczywistych niezbędnych, aby ocenić, czy któryś z modeli komputerowych jest realistyczny.
Budowa cyfrowego bliźniaka rozsiewacza
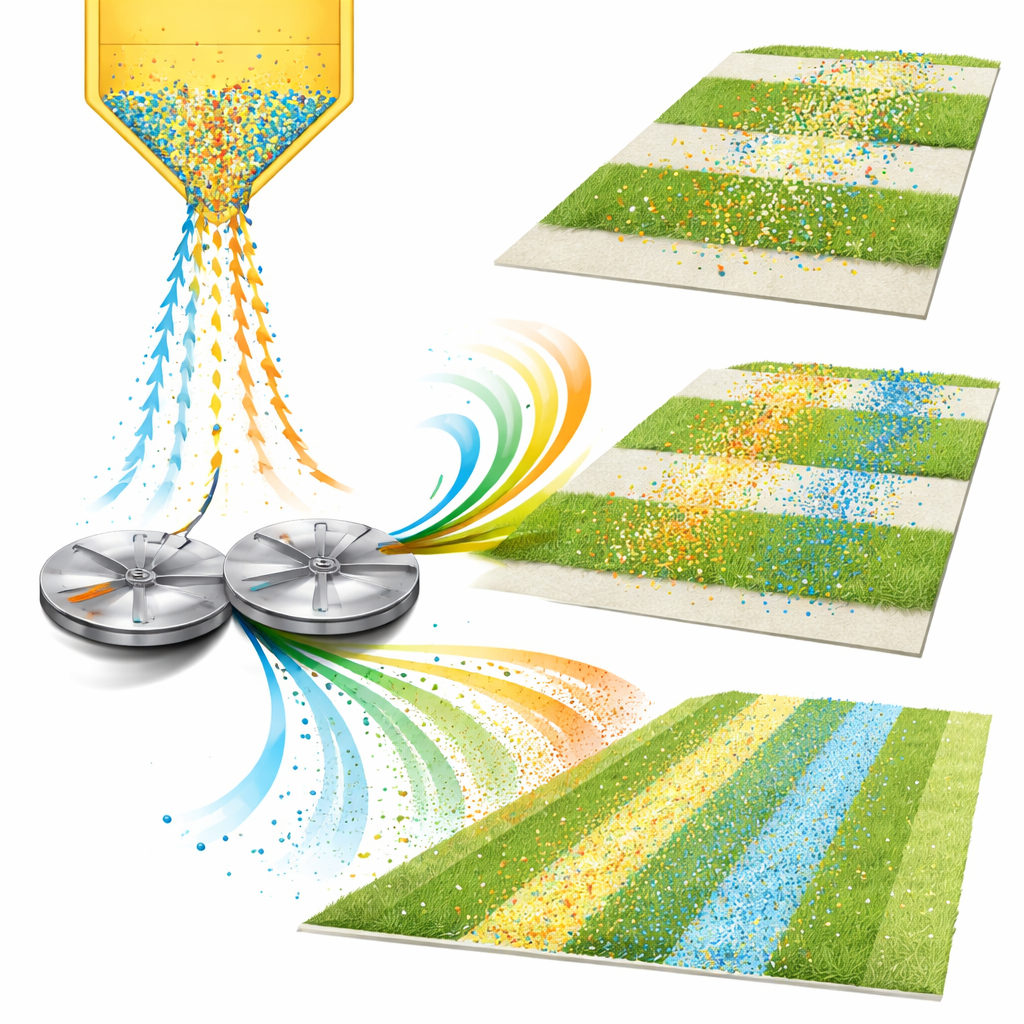
Równolegle badacze zbudowali szczegółowy model 3D tego samego rozsiewacza w wyspecjalizowanym oprogramowaniu wykorzystującym metodę elementów dyskretnych (DEM). Zamiast traktować nawóz jako gładki strumień, DEM śledzi każde ziarno jako osobny obiekt, które zderza się, ślizga i odbija od innych granulek oraz powierzchni maszyny. Zespół wprowadził właściwości nawozu, takie jak rozkład wielkości cząstek, gęstość oraz sprężystość i lepkość przy uderzeniach o stal lub o siebie nawzajem. Uwzględnili też opór powietrza, prędkość ciągnika, prędkość talerzy i temperaturę powietrza, aby odwzorować warunki polowe. Aby dopracować najbardziej niepewne parametry kontaktu, jak współczynnik tarcia między nawozem a stalą, użyli statystycznej metody przesiewowej, a następnie dostosowali najbardziej wpływowy parametr, aż symulowany wzór rozsiewu najlepiej pasował do pomiarów przy jednej reprezentatywnej prędkości talerza.
Jak blisko może być wirtualny i rzeczywisty rozsiew
Po kalibracji cyfrowy rozsiewacz uruchomiono przy tych samych pięciu prędkościach talerzy, co w terenie. Badacze porównali ilość nawozu w wirtualnych tacach z ilością w rzeczywistych pojemnikach na szerokości 16 metrów. Różnice były niewielkie: dla talerzy z trzema łopatkami średnie odchylenie ilości nawozu na szerokości roboczej wyniosło około 2%, a dla poszczególnych prędkości różnica wahała się od prawie zerowej do maksymalnie 5,9%. Odchylenia te są mniejsze lub porównywalne z wynikami wcześniejszych badań podobnych maszyn, w których typowe różnice między symulacją a polem wynosiły około 9–11%. Co ciekawe, podczas gdy wcześniejsze prace sugerowały prosty wzrost rozrzutu poprzecznego wraz ze zwiększeniem prędkości talerzy, niniejsze badanie wykazało bardziej zniuansowane efekty, podkreślając wartość realistycznego modelu śledzącego każde ziarno.
Co to oznacza dla mądrzejszego, czystszego rolnictwa
Badanie pokazuje, że gdy rozsiewacz i nawóz są starannie opisane w oprogramowaniu DEM, symulacje komputerowe mogą wiernie odtwarzać rzeczywiste wzory rozsiewu dla rozsiewaczy z dwoma talerzami. Otwiera to drogę do wykorzystywania prób wirtualnych do badania nowych konstrukcji talerzy, kątów łopatek, rodzajów nawozów i ustawień eksploatacyjnych przy znacznie mniejszym nakładzie czasu, kosztów i zależności od idealnej pogody. Pomagając inżynierom projektować maszyny, które równomierniej rozmieszczają składniki odżywcze tam, gdzie rośliny ich potrzebują, takie symulacje mogą zwiększyć efektywność stosowania nawozów i ograniczyć odpływ nadmiaru do środowiska. W dłuższej perspektywie to podejście można rozszerzyć na inne urządzenia rolnicze i zintegrować z systemami rolnictwa precyzyjnego, wspierając bardziej zrównoważoną i opartą na danych produkcję żywności.
Cytowanie: Kömekçi, F., Demir, V., Kömekçi, C. et al. From virtual to real: comparison of field experiments and DEM simulation of twin-disc granular fertiliser broadcaster. Sci Rep 16, 8548 (2026). https://doi.org/10.1038/s41598-026-39552-x
Słowa kluczowe: rozsiewanie nawozów, materiały ziarniste, maszyny rolnicze, symulacja komputerowa, rolnictwo precyzyjne