Clear Sky Science · pl
Sekwencyjne predykcyjne bezpośrednie sterowanie prędkością silnika PMSM
Inteligentniejsze sterowanie dla codziennych silników elektrycznych
Silniki elektryczne cicho napędzają linie produkcyjne, pompy, roboty, a nawet niektóre urządzenia domowe. Sprawne i gładkie działanie tych silników oszczędza energię, zmniejsza hałas i zużycie oraz poprawia niezawodność. Niniejszy artykuł bada nowy sposób sterowania popularnym typem silnika tak, aby szybko reagował na zmiany, nie stając się przy tym niestabilny ani nie generując nadmiernego „szumu” elektrycznego. Autorzy koncentrują się na strategii, która obiecuje prostsze strojenie dla inżynierów, przy jednoczesnym zachowaniu szybkiej i dokładnej regulacji prędkości.
Dlaczego dzisiejsze układy sterowania trudno dostroić
Synchroniczne silniki z magnesami trwałymi są powszechnie stosowane, ponieważ są zwarte, wydajne i umożliwiają precyzyjne sterowanie prędkością. Tradycyjne schematy sterowania opierają się na kilku zagnieżdżonych pętlach i zestawie pokręteł do strojenia, które inżynierowie muszą dobierać metodą prób i błędów. Nowocześniejsze podejścia oparte na sterowaniu predykcyjnym próbują wybrać najlepsze działanie dla silnika na ułamek sekundy do przodu, poprawiając czas reakcji i umożliwiając jednoczesne uwzględnienie wielu celów (takich jak dokładna prędkość i niskie pobory prądu). Jednak takie regulatory predykcyjne zwykle łączą wszystkie cele w jedną dużą funkcję matematyczną zależną od kilku „czynników wagowych”. Dobór tych wag jest wyjątkowo trudny: dobre ustawienie daje doskonałe wyniki, natomiast złe może spowodować ospałość układu, a nawet jego niestabilność.
Krok po kroku w podejmowaniu decyzji
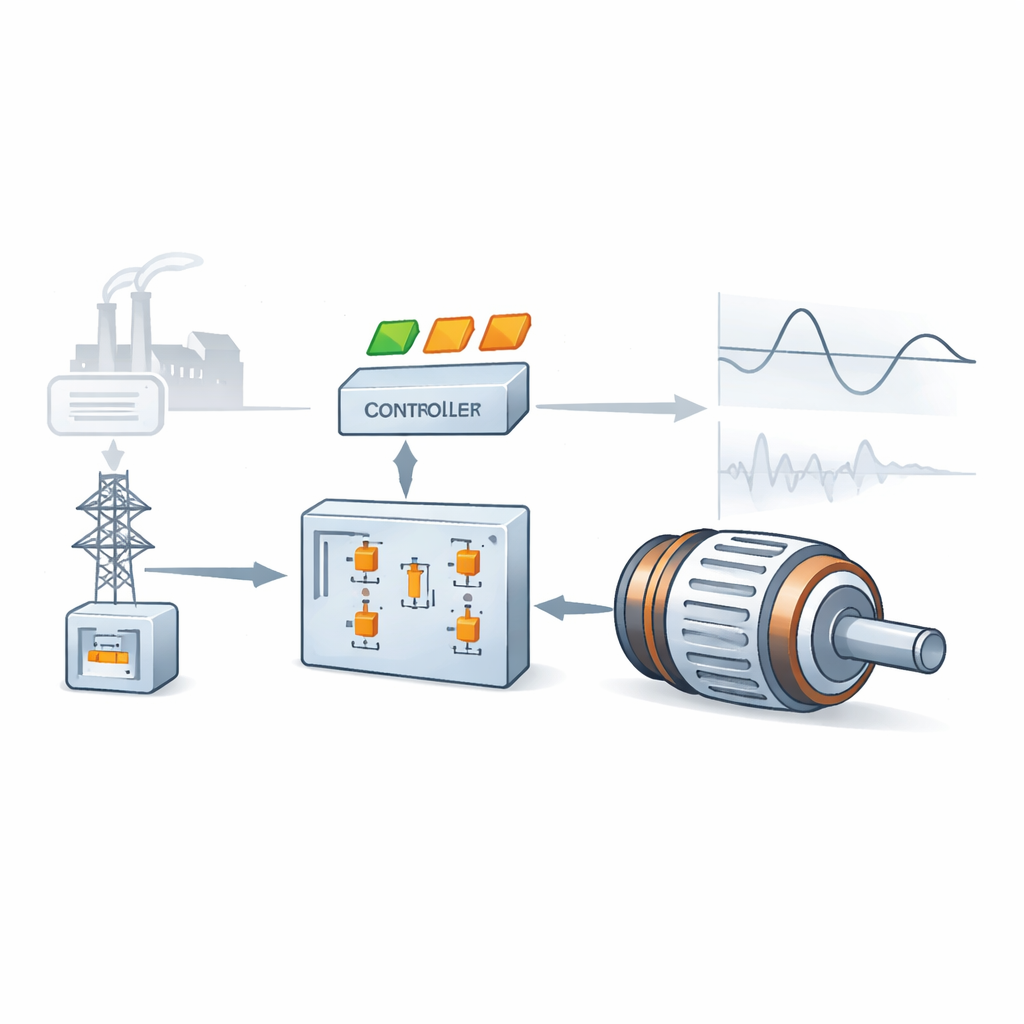
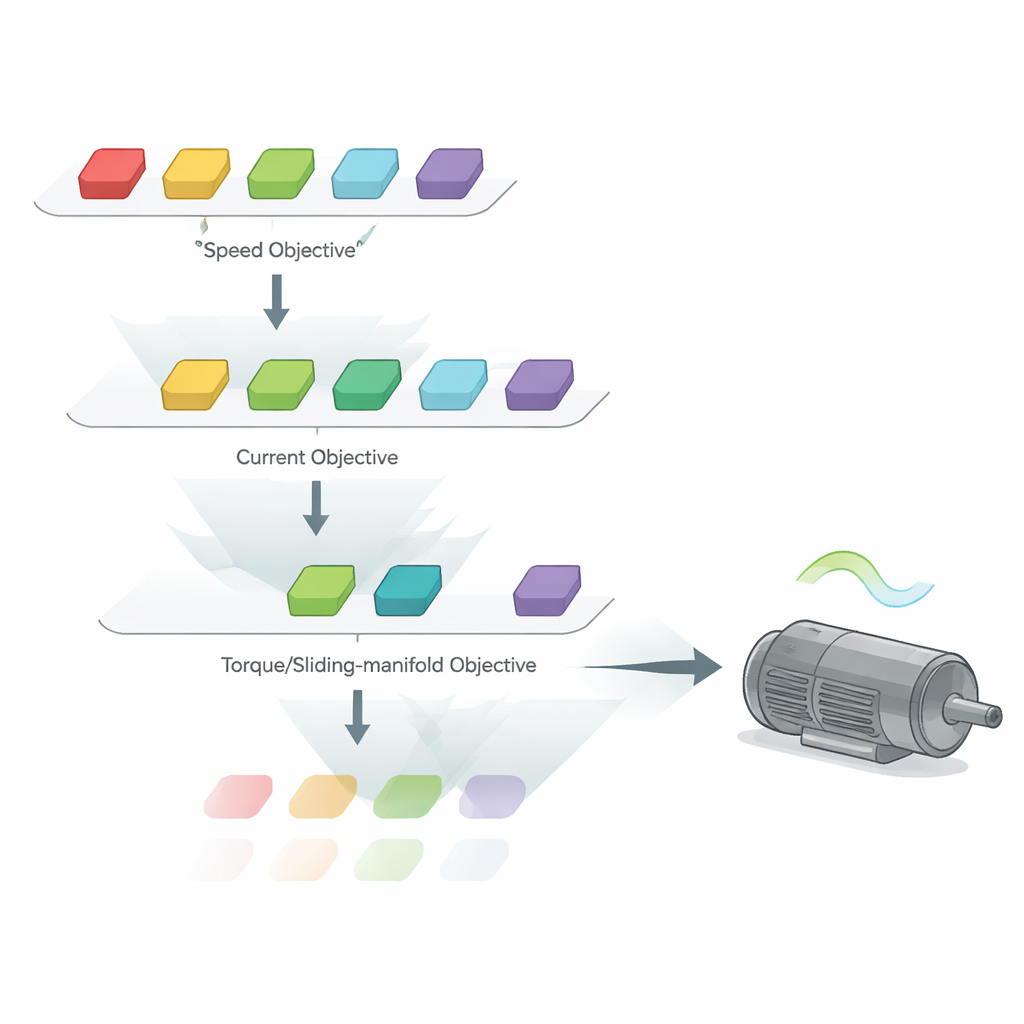
Zamiast upychać wszystkie cele w jedną skomplikowaną formułę, autorzy badają podejście „sekwencyjne”. Tutaj regulator wciąż przewiduje zachowanie silnika dla każdej możliwej pozycji przełączników w elektronice mocy, ale ocenia osobne, prostsze cele jeden po drugim. Najpierw eliminuje opcje przełączników, które dałyby słabe zachowanie prędkości. Następnie, spośród pozostałych opcji, zachowuje tylko te, które efektywnie wykorzystują prąd. Wreszcie wybiera opcję, która najlepiej kształtuje moment silnika, stosując specjalną regułę ślizgową łączącą błąd prędkości z błędem momentu, dzięki czemu prędkość silnika zbiega szybciej. Ponieważ każdy krok koncentruje się na jednym celu, nie trzeba żonglować wieloma wagami; zamiast tego regulator stosuje logiczny proces eliminacji. Towarzyszący obserwator szacuje nieznany moment obciążenia na wale, aby przewidywania pozostały dokładne nawet przy zakłóceniach.
Poprawa stabilności dzięki udoskonalonemu projektowi
Gdy autorzy przetestowali początkową wersję metody sekwencyjnej, stwierdzili, że chociaż reagowała szybko na zmiany prędkości, mogła stać się niestabilna i generowała duże tętnienia prądu silnika, zwłaszcza gdy próbowano wymusić szybszą reakcję. Aby to skorygować, zaproponowali ulepszoną wersję, która wprowadza sprytne uzupełnienie do pierwszego kroku decyzyjnego: nie tylko uwzględnia przewidywaną prędkość, lecz także delikatnie penalizuje pewne składowe prądu i skaluje tę penalizację w zależności od żądanej prędkości. Przy niskich prędkościach regulator koncentruje się bardziej na utrzymaniu prądów w ryzach; przy wyższych prędkościach dopuszcza silniejsze działanie, aby utrzymać wydajność. Ta zmiana umożliwia stosowanie bardziej agresywnej reguły ślizgowej dla momentu bez wywoływania niestabilności. W szczegółowych symulacjach komputerowych ulepszona metoda dorównywała czasowi narastania dobrze dostrojonego konwencjonalnego regulatora predykcyjnego i generowała podobny poziom zniekształceń elektrycznych, przy mniejszej liczbie parametrów do strojenia.
Próby w laboratorium
Zespół zaimplementował następnie zarówno oryginalne, jak i ulepszone regulatory sekwencyjne na rzeczywistym napędzie 1,1 kW, korzystając z platformy rapid‑prototyping. Porównali je ze standardowym regulatorem predykcyjnym w realistycznych warunkach, obejmujących szybkie rampy prędkości, nagłe przyłożenie obciążenia, a nawet odwrócenia kierunku obrotów. Oryginalny regulator sekwencyjny potrafił regulować prędkość, ale wykazywał sporadyczną utratę stabilności i silne tętnienia prądu, szczególnie przy wyższych prędkościach. W przeciwieństwie do tego wersja ulepszona pracowała stabilnie w całym badanym zakresie. Poprzez regulację jednego kluczowego parametru kształtującego regułę ślizgową badacze mogli balansować między śledzeniem prędkości a gładkością przebiegu prądu. Ustawienia pośrednie dawały praktyczną równowagę: błędy prędkości były istotnie zredukowane w porównaniu z konserwatywnymi ustawieniami, przy akceptowalnym wzroście zniekształceń prądu.
Co to oznacza dla napędów w praktyce
Dla osób niespecjalizujących się w temacie główne przesłanie jest takie, że autorzy pokazali prostszy, a jednocześnie wciąż skuteczny sposób sterowania wysoko wydajnymi silnikami elektrycznymi. Ich ulepszona strategia sekwencyjna eliminuje dużą część zgadywania potrzebnego przy strojeniach tradycyjnych regulatorów predykcyjnych, zachowując jednocześnie szybką reakcję na zmiany prędkości i zakłócenia. Metoda nie jest idealna — przebiegi prądu wciąż są nieco bardziej „hałaśliwe” niż byśmy chcieli, szczególnie przy bardzo wymagających ustawieniach — ale stanowi ważny krok w kierunku bardziej niezawodnych, łatwych do uruchomienia napędów. Przyszłe prace będą koncentrować się na zmniejszeniu tych zniekształceń prądu i dalszej analizie stabilności, z celem uczynienia tego typu inteligentnego, sekwencyjnego sterowania odpowiednim dla większych, bardziej rygorystycznie regulowanych systemów przemysłowych.
Cytowanie: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
Słowa kluczowe: bezszczotkowy synchroniczny silnik z magnesami trwałymi, sterowanie predykcyjne modelowe, sterowanie prędkością silnika, sterowanie sekwencyjne, napędy elektroniki mocy