Clear Sky Science · pl
Badania nad inteligentną metodą rozpoznawania części mechanicznych o dużym podobieństwie cech w środowisku przemysłowym
Dlaczego wykrywanie podobnych części ma znaczenie
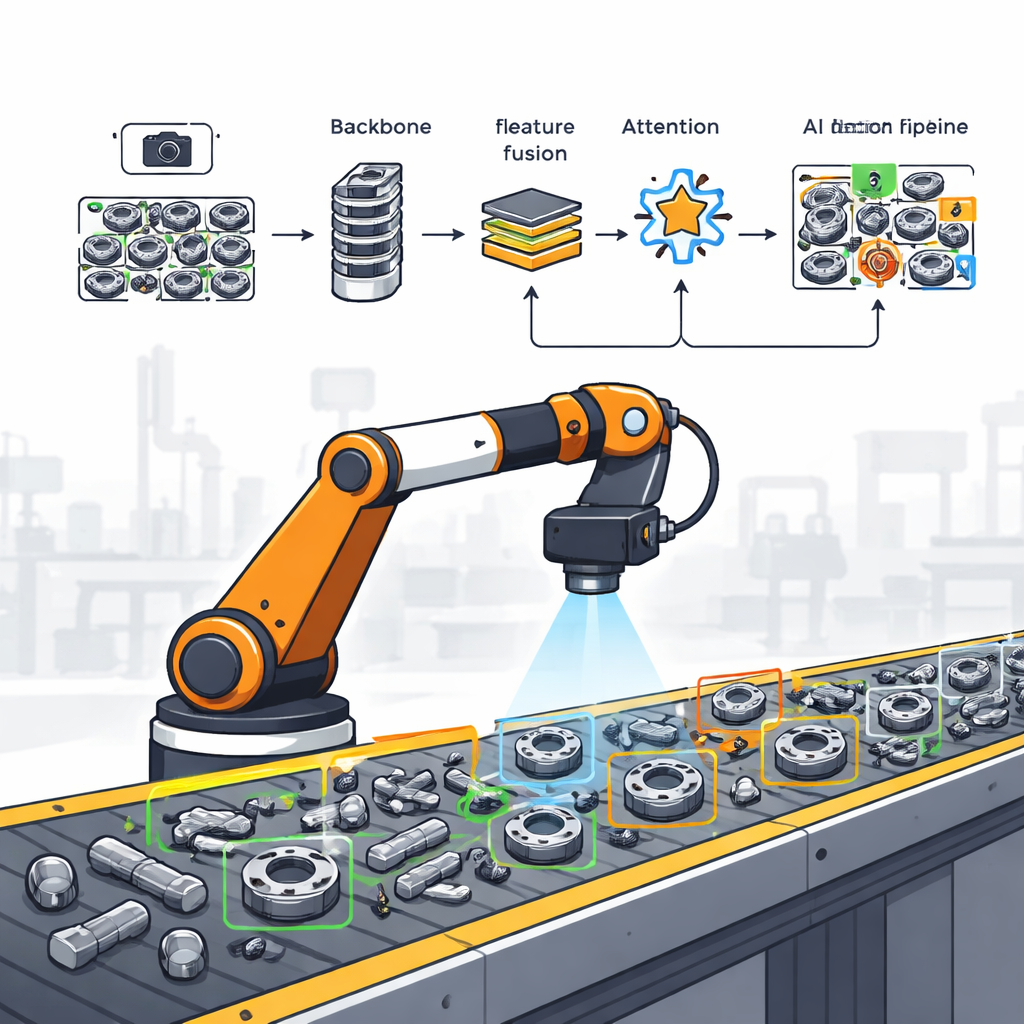
Współczesne zakłady polegają na robotach, które odnajdują, chwytają i montują tysiące drobnych metalowych elementów. Wiele z tych części — koła zębate, łożyska, zębatki, nakrętki i śruby — wygląda niezwykle podobnie, zwłaszcza przy trudnym oświetleniu lub gdy nachodzą na siebie na taśmie. Jeśli robot pomyli jedną część z inną, może to prowadzić do zatorów, wad produktu, a nawet uszkodzeń maszyn. Niniejsze badanie zajmuje się pozornie prostym pytaniem o dużych skutkach przemysłowych: jak kompaktowy, szybki system wizji może niezawodnie rozróżniać niemal identyczne części w warunkach warsztatowych?
Wyzwania wizji w prawdziwej fabryce
Na hali produkcyjnej kamery rzadko mają tak czysty widok, jak w materiałach demonstracyjnych. Oświetlenie jest nierównomierne, co powoduje silne refleksy na błyszczącym metalu i głębokie cienie w innych obszarach. Części są wsypywane do pojemników lub rozsypane na taśmach, często częściowo zakrywając się nawzajem. Co gorsza, wiele metalowych elementów ma podobne kształty, kolory i faktury, pozostawiając bardzo niewiele oczywistych wskazówek wizualnych. Tradycyjne oprogramowanie bazujące na dopasowaniu szablonów lub ręcznie projektowanych cech słabo radzi sobie w takich warunkach: jest wolne, kruche przy zmieniającym się świetle i często zawodzi, gdy części nachodzą na siebie lub są obrócone w nieprzewidziany sposób.
Budowanie na szybkich detektorach jednoprzebiegowych
W ostatnich latach rodzina modeli sztucznej inteligencji znana jako YOLO (skrót od „You Only Look Once”) zyskała popularność do wykrywania obiektów na obrazach w jednym, szybkim przebiegu. YOLOv8, jedna z nowszych wersji, już dobrze równoważy dokładność i prędkość i może działać w czasie rzeczywistym. Jednak gdy różne części wyglądają niemal identycznie, nawet YOLOv8 może przeoczyć subtelne wskazówki lub narysować niedokładne ramki. Wcześniejsze próby zmniejszania modeli YOLO na potrzeby małych urządzeń zwykle redukowały parametry kosztem zdolności reprezentowania drobnych detali — a to właśnie jest potrzebne do rozróżnienia do złudzenia podobnych części mechanicznych.
Szczupła, lecz ostrzejsza sieć detekcyjna
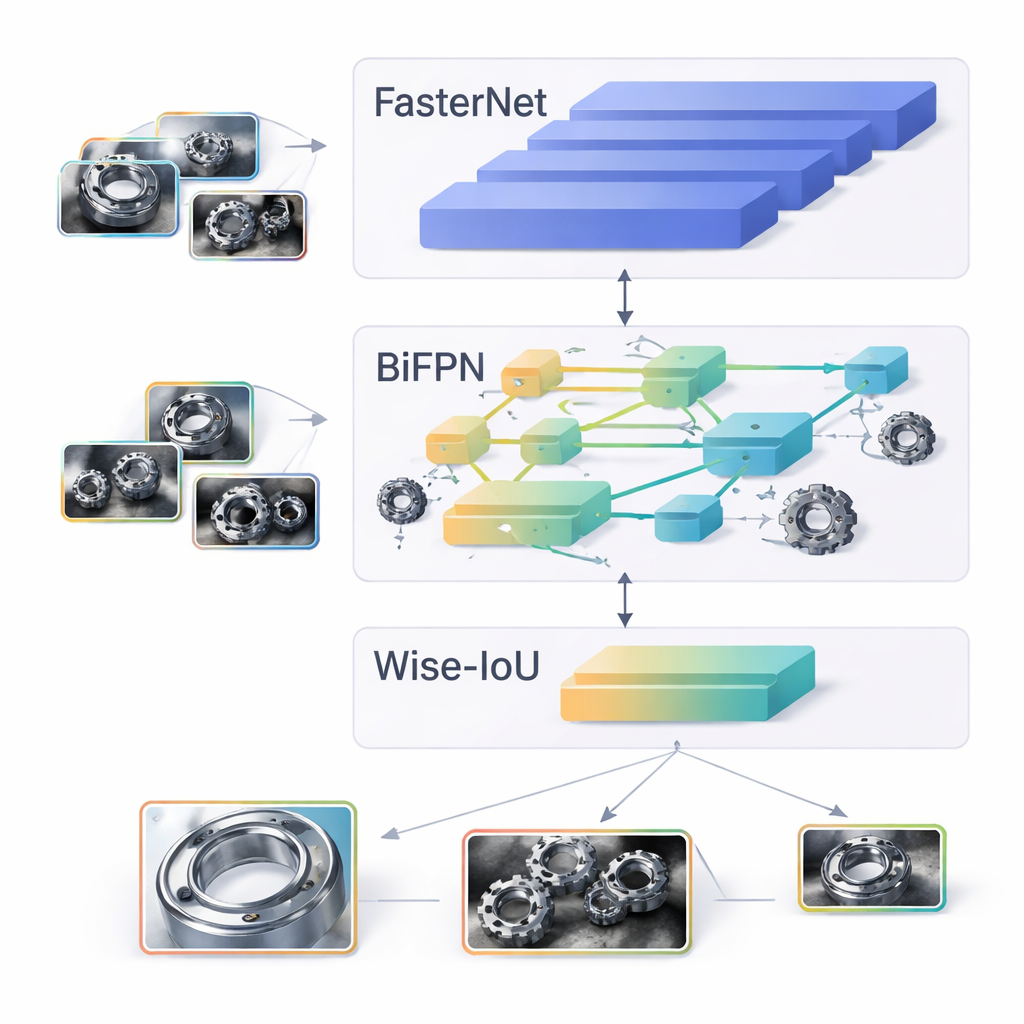
Autorzy proponują zmodyfikowaną wersję najmniejszego modelu YOLOv8, nazwaną YOLOv8n, dostosowaną specjalnie do mylących części przemysłowych i sprzętu o ograniczonej mocy obliczeniowej. Po pierwsze, wymieniają standardowe jądro sieci na nowszą konstrukcję o nazwie FasterNet, która wykorzystuje trik „częściowej” konwolucji, działającej tylko na najbardziej użytecznych regionach obrazu na każdym kroku. Redukuje to powtarzane operacje w pamięci bez utraty kluczowych informacji wizualnych. Po drugie, przeprojektowują środkową „szyję” sieci, stosując dwukierunkową piramidę cech (BiFPN), która pozwala informacji płynąć zarówno od widoków ogólnych do drobnych detali, jak i z mikroszczegółów w górę, dzięki czemu małe, częściowo zasłonięte elementy korzystają z kontekstu i odwrotnie.
Nauczanie sieci ignorowania fałszywych wskazówek
Ponad samą strukturą sieci, sposób jej uczenia się — kierowany funkcją straty — mocno wpływa na to, na co zwraca uwagę. Standardowe metody treningowe traktują przykłady mniej więcej jednakowo, co oznacza, że przykłady treningowe niskiej jakości (słabo dopasowane lub niejednoznaczne ramki) mogą wprowadzać model w błąd. Autorzy zastępują zwykłą zasadę dopasowywania ramek metodą nazwaną Wise‑IoU. Mówiąc prościej, podejście to ocenia każdy przykład treningowy nie tylko przez nakładanie się, ale też przez to, jak bardzo jest „odstający”, a następnie łagodnie zmniejsza wpływ tych zawodnych przykładów. Z czasem system uczy się głównie na jasnych, dobrze oznaczonych przykładach, co prowadzi do ściślejszych i bardziej wiarygodnych ramek detekcji, zwłaszcza gdy części nachodzą na siebie lub występują w trudnym oświetleniu.
Testy systemu
Aby ocenić swoje rozwiązanie, zespół zbudował własny zbiór obrazów sześciu powszechnych części mechanicznych, każdą sfotografowaną 1250 razy przy różnych poziomach oświetlenia i z różnym stopniem wzajemnego zasłaniania. Porównali swój ulepszony model ze standardowym YOLOv8n i kilkoma innymi lekkimi detektorami. Nowy system osiągnął wyższą ogólną jakość detekcji przy zużyciu mniej niż dwóch trzecich obliczeń i zmniejszeniu liczby parametrów o około 42%. W szczególności podniósł kluczowy wskaźnik zwany średnią precyzją (mAP) przy powszechnie stosowanym progu o 1,5 punktu procentowego, jednocześnie działając wystarczająco wydajnie w czasie rzeczywistym na skromnym sprzęcie.
Co to oznacza dla inteligentnych fabryk
W praktyce badanie pokazuje, że roboty fabryczne mogą stać się zarówno mądrzejsze, jak i bardziej oszczędne. Dzięki przeprojektowanemu rdzeniowi sieci, inteligentniejszemu łączeniu cech i bardziej selektywnej regule uczenia, mały model AI może bardziej niezawodnie rozróżniać podobne do siebie koła zębate, łożyska i inne części w chaotycznych, rzeczywistych scenach — nawet przy słabym oświetleniu i nachodzeniu elementów. To połączenie wyższej dokładności i niższego obciążenia obliczeniowego ułatwia wdrażanie solidnej wizji na tanich urządzeniach brzegowych, torując drogę do bardziej elastycznych, w pełni zautomatyzowanych linii produkcyjnych bez potrzeby masywnych serwerów czy idealnie kontrolowanego środowiska.
Cytowanie: Lu, C., Ye, X., Wu, J. et al. Research on intelligent recognition method of mechanical parts with high feature similarity in industrial field environment. Sci Rep 16, 7640 (2026). https://doi.org/10.1038/s41598-026-39036-y
Słowa kluczowe: detekcja obiektów przemysłowych, części mechaniczne, lekka głęboka nauka, YOLOv8, automatyzacja fabryk