Clear Sky Science · pl
Prędkość ruchu autonomicznej protezy kończyny kształtuje uosobienie, użyteczność i cechy społeczne robota w rzeczywistości wirtualnej
Dlaczego to, jak porusza się ramię robota, naprawdę ma znaczenie
Robotyczne protezy kończyn stają się co roku bardziej zaawansowane, obiecując nie tylko przywrócenie ruchu po utracie kończyny, ale także odczucie ich jako naturalnej części ciała. Jednak jedno zaskakująco proste pytanie nie było dobrze zbadane: czy prędkość, z jaką porusza się autonomiczne ramie protezy, zmienia to, jak „naturalne”, bezpieczne i użyteczne wydaje się ono osobie je noszącej? To badanie wykorzystało rzeczywistość wirtualną, by sprawdzić, jak różne prędkości ruchu kształtują poczucie, że ramie robotyczne należy do osoby, działa w jej imieniu i zachowuje się jak godny zaufania partner, a nie nerwowa maszyna.
Przymiarka wirtualnego ramienia robota
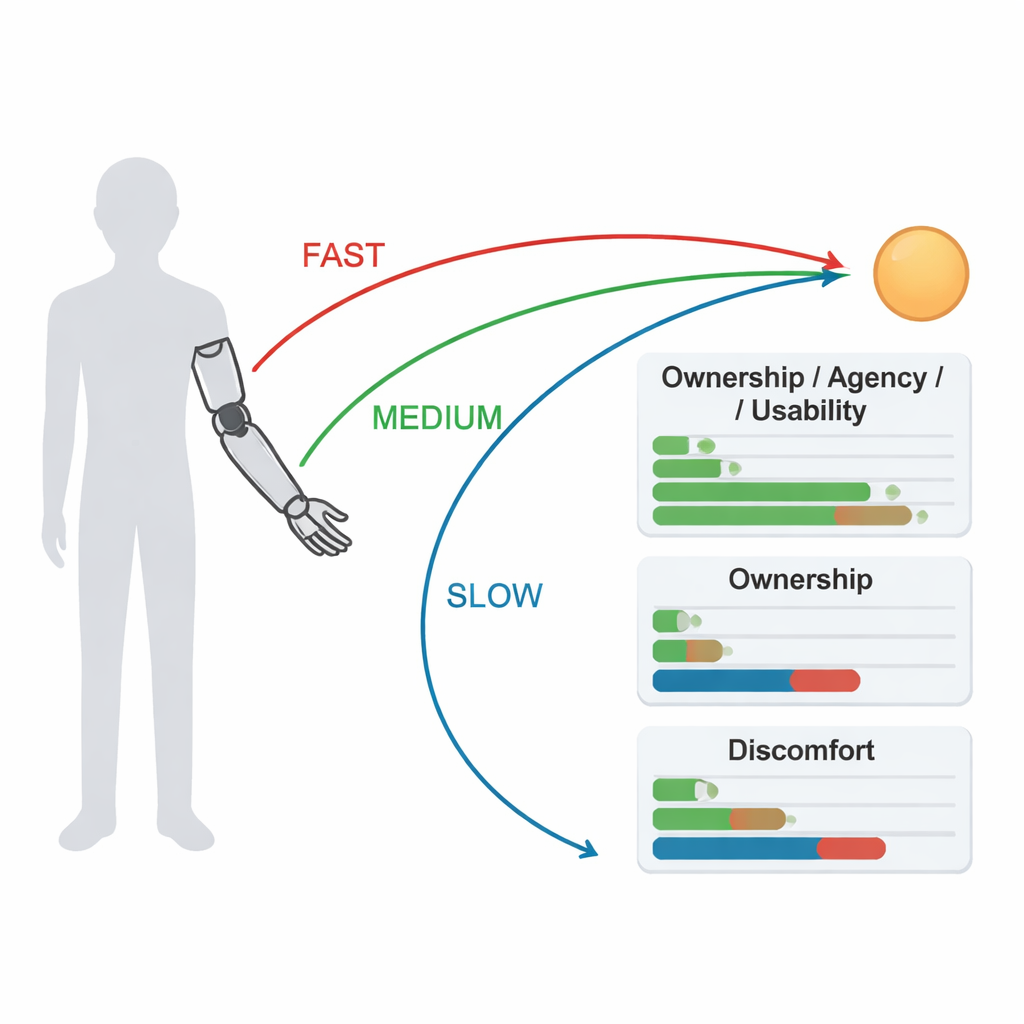
Aby rozwiązać to pytanie, badacze umieścili ochotników w immersyjnym środowisku rzeczywistości wirtualnej i dali im cyfrowe ciało z amputowanym lewym przedramieniem. W wirtualnym świecie brakująca część ramienia została zastąpiona eleganckim, autonomicznie zginającym się przedramieniem robota. Uczestnicy kontrolowali ramię górne i bark, ale gdy ich wirtualny łokieć zbliżał się wystarczająco do świecącego celu, proteza automatycznie dokonywała ruchu dopełniającego sięgnięcie. Ruch podążał po gładkiej trajektorii typu „minimum‑jerk” — łagodnym, krzywoliniowym torze znanym z przypominania naturalnego ludzkiego ruchu.

Sześć różnych prędkości, jedno proste zadanie
Kluczowy twist polegał na tym, że automatyczne zgięcie protezy mogło być bardzo szybkie lub bardzo wolne. Zespół testował sześć czasów ruchu, od błyskawicznych 125 milisekund do relaksujących 4 sekund, z kilkoma stopniami pośrednimi. W każdym warunku prędkości ochotnicy wykonywali serię prób sięgania, próbując dotknąć pojawiających się celów tak szybko, jak potrafili. Po każdym bloku prób oceniali, jak silne było u nich poczucie, że ramię jest ich własne (własność ciała), na ile czuli, że ruchy są „ich” ruchami (poczucie sprawstwa), jak użyteczny jest system oraz jak ramię wypada pod względem społecznych cech robotycznych, takich jak kompetencje, życzliwość i dyskomfort. Badacze mierzyli też, jak szybko uczestnicy poruszali prawdziwym ramieniem górnym w kierunku celu, zanim przejęła to proteza.
Średnia prędkość najbardziej przypomina część ciała
Wyniki ukazały klarowny obraz: umiarkowany czas ruchu około jednej sekundy wywołał najsilniejsze poczucie własności ciała i sprawstwa, a także najwyższe oceny użyteczności. Gdy proteza poruszała się znacznie szybciej (125 ms) lub znacznie wolniej (4 s), ludzie mniej odczuwali, że jest ona częścią ich ciała i mniej, że działa w ich imieniu. Nieco szybszy, półsekundowy ruch również sprawdzał się dobrze, utrzymując wysokie oceny własności i sprawstwa w porównaniu z ekstremami. Ten wzorzec sugeruje istnienie „słodkiego punktu” prędkości, w którym autonomiczna kończyna wydaje się jednocześnie naturalna i pomocna — zbyt szybkie lub zbyt powolne ruchy utrudniają mózgowi integrację urządzenia z obrazem ciała.
Komfort, kompetencje i adaptacja ludzi
Sposób, w jaki prędkość ramienia kształtowała jego „osobowość”, był równie wymowny. Ruchy o umiarkowanej prędkości oceniano jako bardziej kompetentne niż najwolniejsze, podczas gdy najszybsze ruchy wywoływały największy dyskomfort, co powtarza wcześniejsze obserwacje dotyczące robotów autonomicznych. Co ciekawe, oceny życzliwości — mniej więcej, jak przyjazne i przystępne wydawało się ramię — zmieniały się niewiele wraz z prędkością. Ludzie subtelnie modyfikowali też własne zachowanie: gdy proteza poruszała się wolno, mieli tendencję do poruszania realnym ramieniem górnym wolniej w kierunku celu, jakby nieświadomie dostosowywali się do tempa robota. Ta adaptacja sugeruje, że gdy autonomiczna kończyna jest częściowo uosobiona, użytkownik może dostroić swoje ruchy, by lepiej się z nią koordynować.
Co to oznacza dla przyszłych protez
Dla osób niebędących ekspertami wniosek jest prosty: jak szybko porusza się autonomiczna proteza, to nie tylko ustawienie techniczne; bezpośrednio wpływa na to, czy użytkownik czuje, że urządzenie jest naprawdę jego częścią, oraz czy wydaje się bezpieczne i kompetentne. W tym badaniu w rzeczywistości wirtualnej z udziałem zdrowych uczestników ruchy trwające około sekundy osiągnęły najlepszy balans, maksymalizując poczucie własności, kontroli i użyteczności, przy jednoczesnym uniknięciu niepokoju wywołanego ultra‑szybkimi ruchami. W miarę jak bardziej zaawansowane protezy i noszone urządzenia robotyczne będą trafiać do codziennego użytku, staranne dostrojenie prędkości ruchu — i utrzymanie jej w ludzkim, komfortowym zakresie — może być równie ważne jak dodawanie większej liczby czujników czy mądrzejszych algorytmów, jeśli chcemy, by te urządzenia były zarówno skutecznymi narzędziami, jak i naprawdę przystępnymi przedłużeniami ciała.
Cytowanie: Hapuarachchi, H., Inoue, Y., Shigemasu, H. et al. Movement speed of an autonomous prosthetic limb shapes embodiment, usability and robotic social attributes in virtual reality. Sci Rep 16, 7750 (2026). https://doi.org/10.1038/s41598-026-38977-8
Słowa kluczowe: protezy kończyn, rzeczywistość wirtualna, uosobienie, interakcja człowiek–robot, prędkość ruchu