Clear Sky Science · pl
Strategia rekonstrukcji trajektorii pojazdów dla rozpoznawania wideo oparta na dwustopniowej metodzie interpolacji i filtrowania
Dlaczego oczyszczanie cyfrowych danych o ruchu ma znaczenie
Za każdym razem, gdy kamera nadzorująca ruch obserwuje pojazdy przejeżdżające przez skrzyżowanie, generuje ukryty strumień danych opisujących, dokąd każdy pojazd jedzie, jaką ma prędkość oraz jak przyspiesza lub hamuje. Te informacje są bezcenne dla bezpieczniejszych dróg, inteligentniejszych sygnalizacji świetlnych i przyszłych pojazdów autonomicznych. W praktyce jednak te dane są nieuporządkowane: samochody mogą być zasłonięte przez ciężarówki, reflektory odbijają w deszczu, a systemy widzenia komputerowego popełniają błędy. W badaniu tym zajmujemy się bardzo praktycznym pytaniem: jak przekształcić takie wadliwe dane wideo w wiarygodny zapis rzeczywistego ruchu pojazdów?
Kiedy kamery źle odczytują ruch pojazdów
Śledzenie oparte na wideo jest atrakcyjne, ponieważ jest tanie, nieinwazyjne i obejmuje duże obszary. Surowe wyniki jednak zawierają dwa główne problemy. Pierwszym są oczywiste błędy, takie jak samochód, który wydaje się skakać do tyłu, nagle zatrzymywać z prędkości autostradowej lub wykazywać niemożliwe skoki przyspieszenia. Zwykle wynikają one z zasłonięcia, rozmycia ruchu lub chwilowej utraty śledzenia pojazdu przez oprogramowanie. Drugim problemem jest losowe drżenie—małe, szybkie wahania zgłaszanej pozycji. Gdy prędkości i przyspieszenia są wyliczane z tych pozycji, drżenie zostaje wzmocnione, przez co normalna jazda wygląda na chaotyczną. Niekorygowane, te błędy mogą zniekształcić modele ruchu nawet o ponad 40 procent, co z kolei może wprowadzać w błąd badania bezpieczeństwa i systemy jazdy autonomicznej.
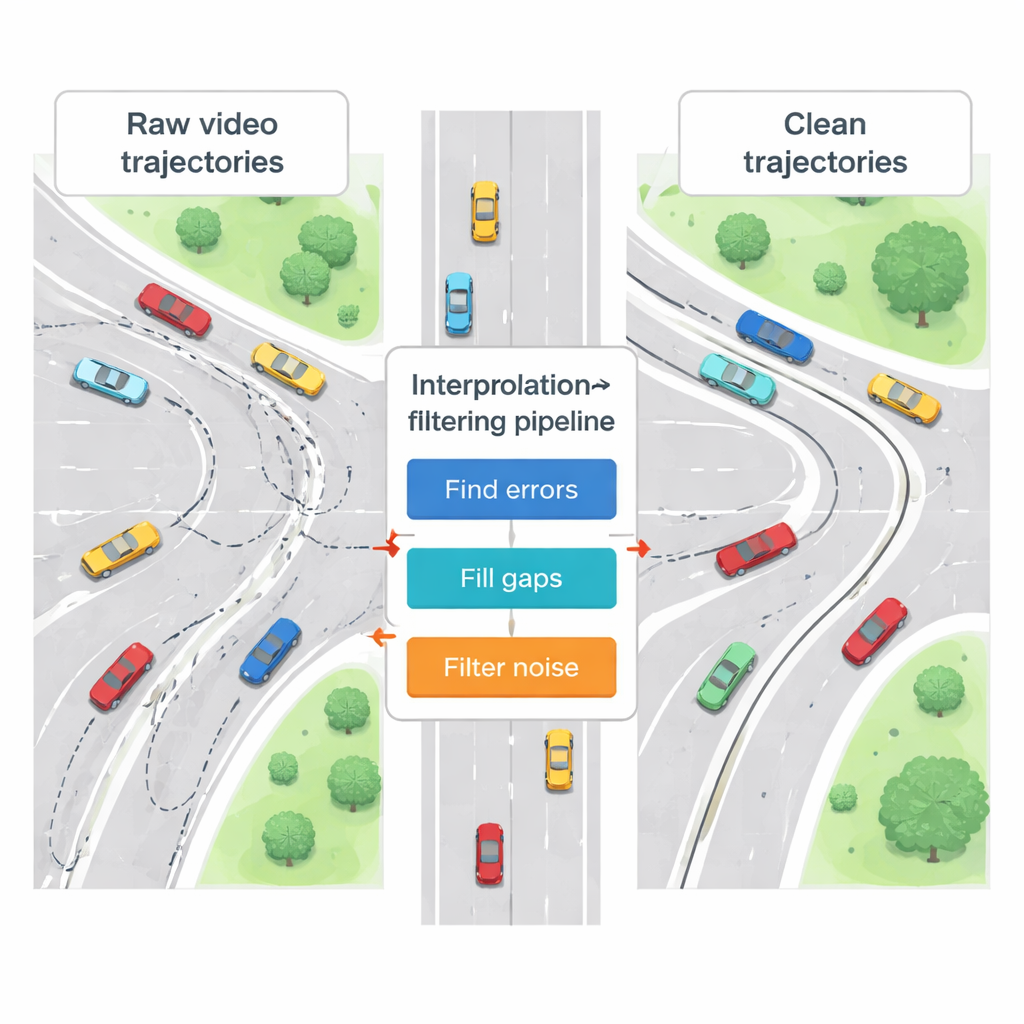
Plan naprawczy w dwóch krokach
Aby naprawić ten problem, autorzy proponują dwustopniową strategię rekonstrukcji działającą jak precyzyjny mechanik cyfrowy. Krok pierwszy koncentruje się na oczywistych błędach: skanuje zapis każdego pojazdu pod kątem prędkości i przyspieszeń przekraczających proste granice fizyczne, takie jak ekstremalnie wysoki «jerk» (bardzo gwałtowne zmiany przyspieszenia) czy przyspieszenia przekraczające to, co rzeczywisty samochód i kierowca mogą znieść. Gdy takie wartości odstające zostaną wykryte, są one zastępowane za pomocą narzędzi matematycznych zwanych interpolacją, które estymują brakujące wartości na podstawie pobliskich, bardziej wiarygodnych punktów. Badanie porównuje kilka wariantów interpolacji i wykazuje, że interpolacja Hermite’a lepiej zachowuje naturalny kształt trajektorii niż bardziej tradycyjna metoda Lagrange’a, szczególnie gdy ruch jest złożony.
Wygładzanie cyfrowej jazdy
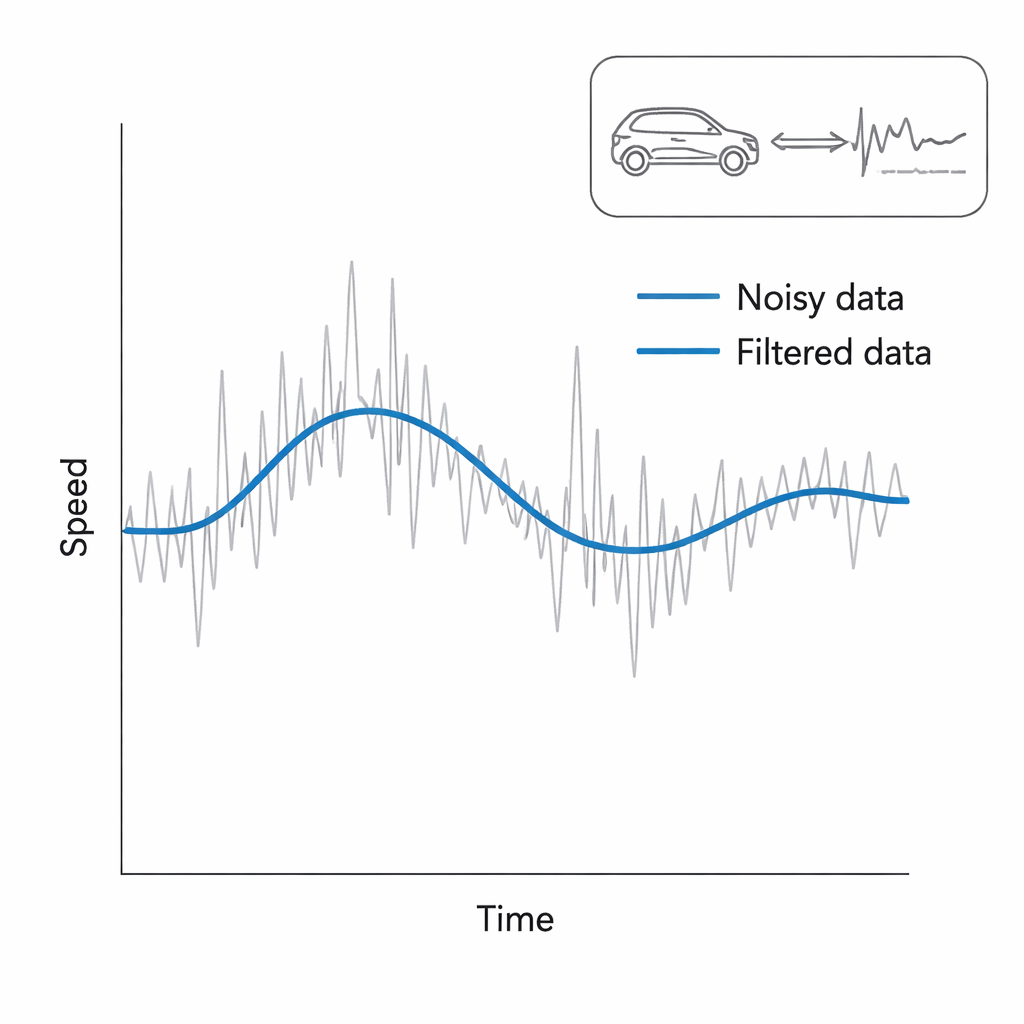
Krok drugi dotyczy subtelniejszego problemu szumu. Nawet po naprawie grubych błędów pozostałe ślady mogą nadal wyglądać nieco chwiejnie. Naukowcy testują tu dwie metody wygładzania danych: udoskonaloną metodę średniej kroczącej, która nadaje większą wagę nowszym punktom, oraz technikę statystyczną znaną jako filtr Kalmana, który ciągle aktualizuje najlepsze przybliżenie rzeczywistej pozycji i prędkości pojazdu w miarę napływu nowych pomiarów. Obie techniki tłumią drżenie, ale filtr Kalmana lepiej podąża za rzeczywistymi zmianami w zachowaniu kierowcy—na przykład łagodnym hamowaniem czy zmianą pasa—bez ich rozmywania. Efektem jest płynniejszy, bardziej realistyczny opis tego, jak każdy pojazd rzeczywiście zachowywał się w czasie.
Testy metody
Zespół zastosował swoją ramę do rzeczywistego wideo nagranego na ruchliwym skrzyżowaniu w Zhengzhou w Chinach, wykorzystując nowoczesne oprogramowanie do wykrywania obiektów i śledzenia, aby wydobyć ścieżki pojazdów. Następnie przetworzyli dziesiątki różnych śladów przez swój dwustopniowy proces i ocenili skuteczność za pomocą prostych miar fizycznych: jak gwałtownie waha się przyspieszenie i jak często «jerk» przekracza poziom uważany za nierealistyczny dla samochodów osobowych. Porównali również oczyszczone trajektorie z wideo z danymi referencyjnymi rejestrowanymi bezpośrednio z przyrządów pokładowych samochodu. W różnych scenariuszach jazdy—stałe przemieszczanie się, gwałtowne hamowanie, zmiany pasa—połączona strategia interpolacji i filtrowania zmniejszyła zmienność przyspieszenia o około 85 procent i niemal wyeliminowała nierealistyczne skoki «jerk», jednocześnie lepiej dopasowując się do zapisów z przyrządów niż kilka porównywanych metod.
Co to oznacza dla codziennych podróży
Mówiąc prosto, artykuł pokazuje, jak przekształcić niedoskonały materiał z powszechnych kamer ruchu w dane, którym inżynierowie i systemy autonomiczne mogą naprawdę ufać. Najpierw naprawiając oczywiste błędy, a potem starannie wygładzając szum, proponowana metoda generuje realistyczne cyfrowe odzwierciedlenia ruchu samochodów bez potrzeby stosowania egzotycznego sprzętu czy ogromnej mocy obliczeniowej. Ten czystszy obraz może zasilać lepsze sterowanie sygnalizacją świetlną, dokładniejsze symulacje zatorów oraz bezpieczniejsze algorytmy jazdy autonomicznej, które polegają na zrozumieniu zachowań kierowców w rzeczywistych warunkach. Choć badanie koncentruje się na jednym mieście i nie obejmuje jeszcze wszystkich warunków pogodowych czy drogowych, wyznacza jasną i praktyczną ścieżkę do wykorzystania istniejących sieci wideo jako wiarygodnych sensorów dla kolejnej generacji inteligentnych systemów transportowych.
Cytowanie: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
Słowa kluczowe: trajektoria pojazdu, dane z wideo ruchu drogowego, odszumianie danych, inteligentny transport, jazda autonomiczna