Clear Sky Science · pl
Kontrola adaptacyjna sieci neuronowej oparta na ESO dla quadrotora przeciwko zakłóceniom wiatrowym i ładunkowym
Utrzymanie dronów stabilnymi w nieprzyjaznym świecie
Małe drony czterowirnikowe są coraz częściej używane do zadań takich jak inspekcja mostów, monitorowanie upraw czy przewóz drobnych przesyłek. W świecie rzeczywistym te latające roboty muszą jednak radzić sobie z porywistym wiatrem i bujającymi się ładunkami zawieszonymi pod nimi, które łatwo wyprowadzają je z kursu. Artykuł przedstawia nową metodę utrzymywania takich dronów na zaplanowanej trajektorii, nawet gdy powietrze jest niespokojne, a wahający się ładunek je odciąga.
Dlaczego wiatr i wiszące ładunki sprawiają tyle problemów
Quadrotor jest z natury trudny do sterowania. Jest lekki, szybko reaguje na niewielkie zmiany w pracy silników, a jego ruchy w różnych kierunkach są ściśle sprzężone. Gdy uderzają w niego silne lub szybko zmieniające się podmuchy wiatru, działają na niego w nieprzewidywalny sposób. Dodanie ładunku zawieszonego na linke, na przykład kamery czy butelki z cieczą, pogarsza sytuację: ładunek może kołysać się jak wahadło i przekazywać dodatkowe siły z powrotem na drona. Tradycyjne regulatory, takie jak powszechnie stosowany PID czy bardziej zaawansowane metody typu sliding-mode i backstepping, działają dobrze tylko wtedy, gdy inżynierowie bardzo dokładnie znają fizykę drona i gdy zakłócenia są niewielkie. Jeśli model matematyczny jest niedokładny albo siły wiatru i ładunku zmieniają się w skomplikowany sposób, te metody mogą dawać ospałe reakcje, przeregulowania lub widoczne chybotanie w locie.
Sprytny strażnik dla ukrytych zakłóceń
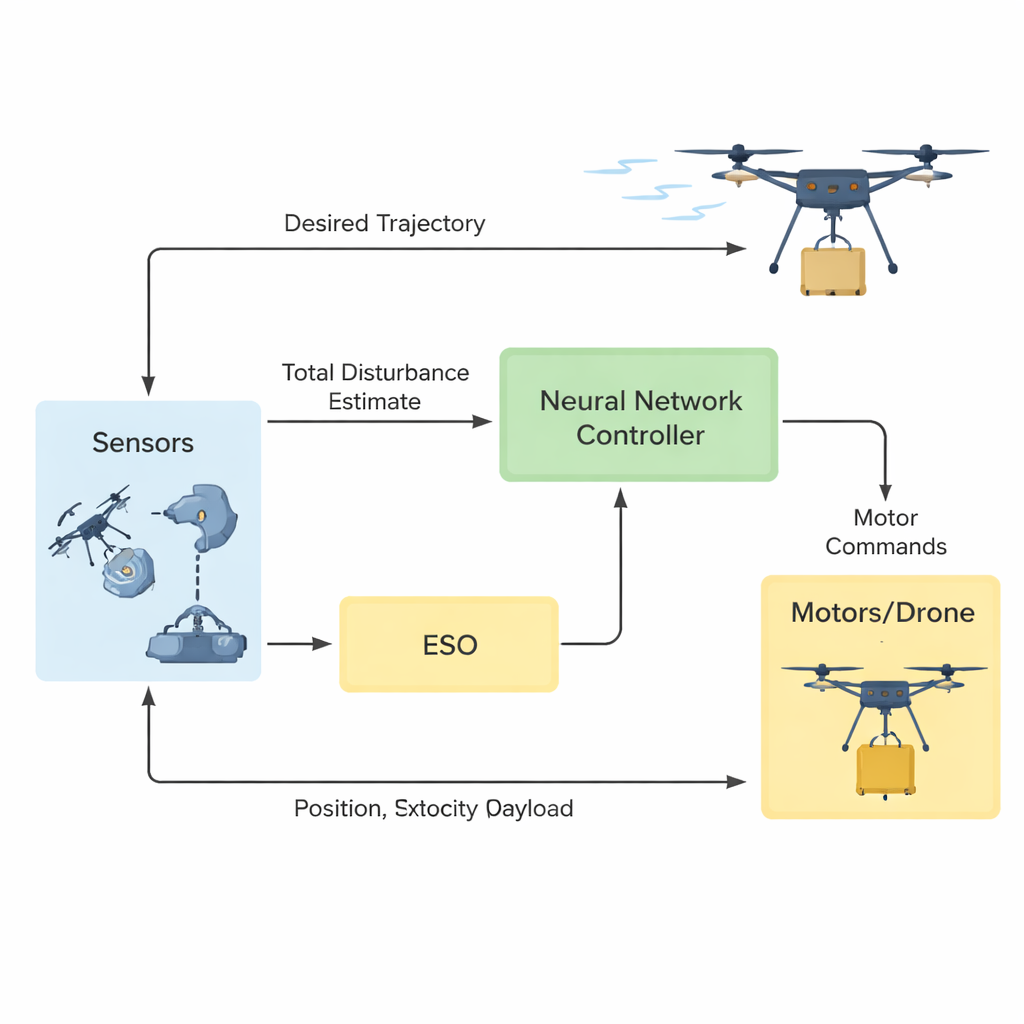
Aby to rozwiązać, autorzy opierają się na koncepcji aktywnego tłumienia zaburzeń. Zamiast modelować każdy detal wiatru i bujającego się ładunku, traktują wszystkie nieznane wpływy łącznie jako pojedyncze „zagregowane” zakłócenie. Specjalnie zaprojektowany rozszerzony obserwator stanu działa jak matematyczny strażnik, nieustannie wywnioskowując całkowite zakłócenie na podstawie ruchu drona. Co istotne, obserwator jest strojonypoprzez tylko jeden główny parametr, co znacznie upraszcza konfigurację w porównaniu z wieloma istniejącymi projektami. Teoria pokazuje, że przy właściwym doborze parametrów estymata zakłócenia zbiega szybko i pozostaje ściśle ograniczona, co oznacza, że można na niej polegać jako na korekcji feedforward w czasie rzeczywistym, a nie jedynie przybliżonym oszacowaniu.
Pozwól sieci neuronowej nauczyć się trudnych zależności
Nawet przy dobrych estymatach zakłóceń, regulator nadal musi znać, jak polecenia dla silników przekładają się na rzeczywisty ruch — zależność ta zależy od masy, geometrii i innych parametrów fizycznych, które mogą się zmieniać w czasie. Zamiast polegać na żmudnie identyfikowanym modelu, autorzy wprowadzają sieć neuronową z funkcjami bazowymi radialnymi, która uczy się tej zależności bezpośrednio z sygnałów lotu. Regulator potrzebuje jedynie informacji, gdzie dron się znajduje, dokąd powinien zmierzać i drugiej pochodnej żądanej trajektorii (jak szybko przyspiesza punkt docelowy). Reguła adaptacyjna ciągle aktualizuje wewnętrzne wagi sieci neuronowej, aby zmniejszać błędy śledzenia. Przy użyciu analizy opartej na funkcji Lyapunowa autorzy dowodzą, że w ramach tego adaptacyjnego schematu błędy śledzenia pozostają jednorodnie ograniczone i można je dowolnie zmniejszać, przy jednoczesnym zachowaniu stabilności aktualizacji wag.
Sprawdzenie metody w praktyce
Zespół weryfikuje swoje podejście zarówno w symulacjach komputerowych, jak i w eksperymentach rzeczywistych. W symulacjach dron ma za zadanie podążać po wymagających trójwymiarowych ścieżkach spiralnych podczas losowych podmuchów wiatru i sił ładunku zmieniających się w czasie. Nowy regulator porównano z trzema innymi zaawansowanymi metodami: liniowym aktywnym tłumieniem zaburzeń, sterowaniem sliding-mode, bezmodelowym terminalnym sterowaniem sliding-mode, a w trudniejszym teście — adaptacyjnym sterowaniem ułamkowym. W wielu scenariuszach proponowana metoda osiąga gładsze trajektorie i mniejsze średnie kwadratowe błędy pozycji, zwłaszcza po wystąpieniu zakłóceń. W testach fizycznych badacze latali quadrotorem w pomieszczeniu, podczas gdy dwie wentylatory przemysłowe dmuchały na niego powietrze, a pod nim wisiała butelka wody o masie 200 gramów. Kamery do przechwytywania ruchu rejestrowały pozycję drona. Nawet przy ciągłym wietrze i ręcznych pociągnięciach za ładunek dron utrzymywał punkt docelowy w granicach kilku centymetrów, a polecenia silników pozostawały stabilne, co sugeruje, że metoda nadaje się do praktycznego zastosowania na sprzęcie.
Co to oznacza dla codziennego używania dronów
Dla osób niezajmujących się tą specjalizacją kluczowy wniosek jest taki, że ta praca oferuje sposób uczynienia dronów bardziej niezawodnymi w trudnych warunkach bez konieczności posiadania perfekcyjnej wiedzy o ich wewnętrznej fizyce. Łącząc prosty, lecz skuteczny obserwator zaburzeń z kontrolerem opartym na uczeniu, system może adaptować się w locie do porywów wiatru i kołyszących się ładunków, utrzymując drona na kursie przy minimalnym wysiłku strojenia. Tego rodzaju odporne, mało-modelowe sterowanie może ułatwić wdrożenie dronów do rutynowych zadań w miastach, na farmach i w fabrykach, a te same idee mogą w przyszłości rozszerzyć się na zespoły dronów oraz na projekty tolerujące uszkodzenia, które pozwolą kontynuować lot nawet przy awarii niektórych elementów.
Cytowanie: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
Słowa kluczowe: sterowanie quadrotorem, stabilność drona, zakłócenia wiatrowe, regulator sieci neuronowej, śledzenie ładunku