Clear Sky Science · pl
Ulepszony pure pursuit z dynamiczną kontrolą skrętu dla autonomicznych robotów mobilnych oraz zastosowanie do bezpiecznej nawigacji w zakładach chemicznych
Roboty, które trzymają kurs
Gdy roboty wychodzą z czystych hal fabrycznych i wjeżdżają na pola uprawne oraz do zakładów chemicznych, muszą precyzyjnie podążać wąskimi trasami. Nawet niewielkie kołysanie może zgnieść plony, uderzyć w rury lub wjechać w obszar z obecnością łatwopalnych gazów. W artykule opisano nowy sposób sterowania kierunkiem i prędkością robotów kołowych, dzięki któremu mogą one utrzymywać się blisko zaplanowanej trasy zarówno na otwartej przestrzeni, jak i w ciasnych środowiskach przemysłowych.
Dlaczego prowadzenie robota jest trudne
Wiele współczesnych autonomicznych robotów mobilnych korzysta z prostej zasady zwanej „pure pursuit” do podążania za ścieżką. Robot patrzy krótki dystans naprzód wzdłuż trasy, kieruje się ku temu punktowi i powtarza ten proces szybko. W praktyce inżynierowie muszą zdecydować, jak daleko robot ma „patrzeć” oraz jak szybko ma się poruszać. Gdy odległość lookahead jest zbyt krótka, robot reaguje nerwowo i może kołysać się z boku na bok. Jeśli jest zbyt długa, reaguje za wolno i przecina zakręty, zwłaszcza na ostrych łukach lub przy większych prędkościach. Na zewnątrz pojawia się kolejna komplikacja: pozycja robota jest estymowana na podstawie połączenia sygnałów satelitarnych, czujników inercyjnych i pomiarów obrotów kół, z których każdy ma własne błędy i opóźnienia.
Sprytniejszy sposób skręcania i regulacji prędkości
Autorzy proponują ulepszoną metodę nazwaną Pure Pursuit with Dynamic Steering Control (PP-DSC). Zamiast utrzymywać stałą odległość lookahead i prędkość, robot dostosowuje oba parametry w czasie rzeczywistym w zależności od ostrości skrętu. Gdy kąt skrętu jest niewielki, a ścieżka niemal prosta, robot używa dłuższego lookahead i wyższej prędkości, by poruszać się płynnie i efektywnie. W miarę narastania kąta skrętu na zakrętach, odległość lookahead zmniejsza się, a prędkość automatycznie spada, dając robotowi więcej czasu na reakcję i redukując dryf boczny. To zachowanie zaimplementowano na czterokołowym robocie typu samochodowego, który korzysta z nowoczesnego frameworka robotycznego oraz wysokoprecyzyjnego pozycjonowania satelitarnego, czujnika inercyjnego i enkoderów kół do estymacji ruchu.

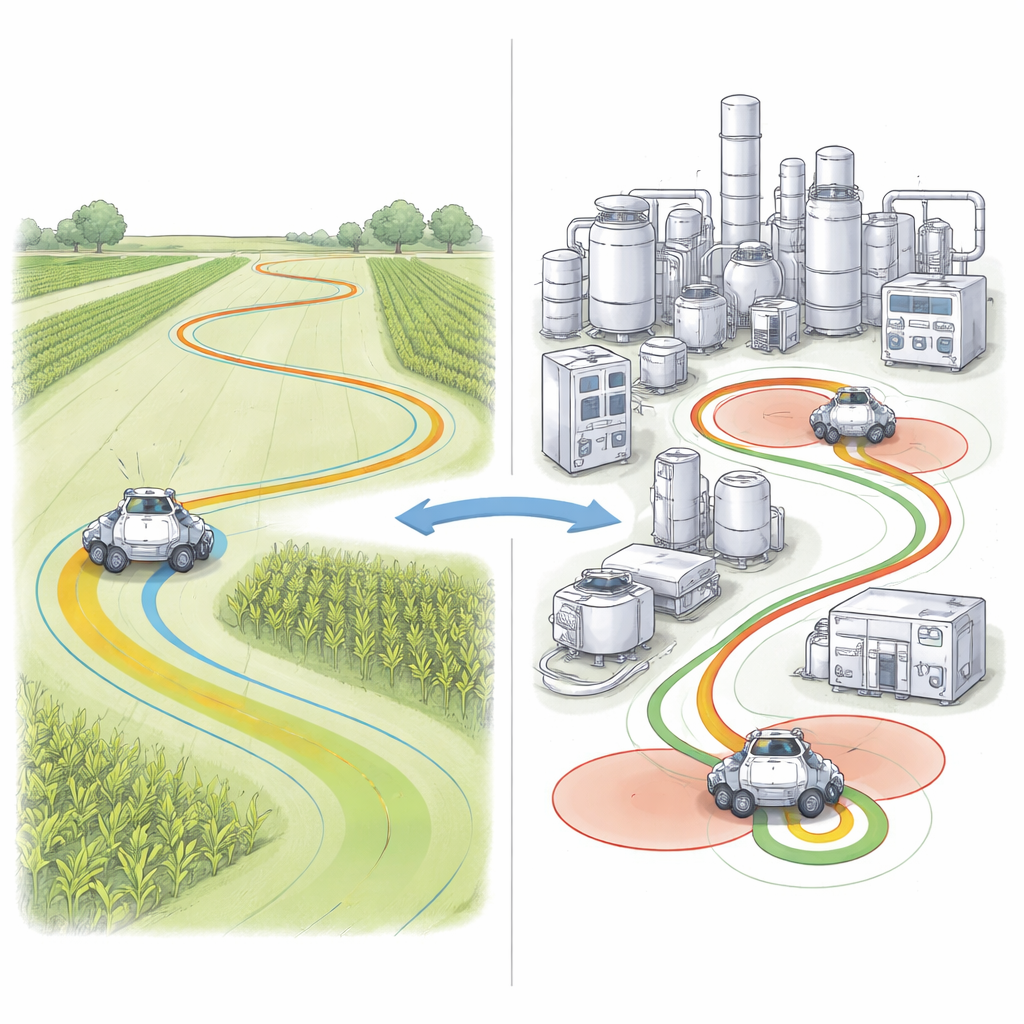
Testy w polach i wirtualnych zakładach chemicznych
Aby sprawdzić skuteczność PP-DSC, zespół przeprowadził eksperymenty zewnętrzne na trzech podstawowych trasach: linii prostej, pętli oraz ósemki, przy prędkościach od 1 do 5 metrów na sekundę. Porównali nową metodę ze standardowym podejściem pure pursuit. Ulepszony regulator utrzymywał robota znacznie bliżej zamierzonej ścieżki w każdym przypadku. Na prostych odcinkach średni błąd boczny spadł do około pięciu centymetrów, a na krzywych błąd utrzymywał się poniżej ośmiu centymetrów. W przeciwieństwie do tego tradycyjna metoda mogła dryfować o kilkadziesiąt centymetrów i wykazywała większe piki przy wchodzeniu lub wychodzeniu z zakrętów, zwłaszcza przy wyższych prędkościach.
Dodanie bezpieczeństwa w strefach zagrożenia
Badacze zastanawiali się także, jak taki robot mógłby zachowywać się wewnątrz zakładu chemicznego, gdzie mógłby np. inspekcjonować gorące reaktory lub przewozić próbki. Zamiast budować pełne przemysłowe stanowisko testowe, użyli szczegółowego modelu komputerowego zakładu biodiesla, który uwzględniał położenie urządzeń i stref o wyższym ryzyku pożaru i eksplozji. Rozszerzyli swój regulator o czynnik bezpieczeństwa, który automatycznie zwalnia robota po wejściu do tych stref zagrożenia, opierając się na standardowym wskaźniku pożarowo-wybuchowym stosowanym w bezpieczeństwie procesowym. Symulacje wykazały, że ta wersja PP-DSC uwzględniająca bezpieczeństwo nieznacznie zwiększała błąd śledzenia—mniej niż o jeden procent średnio—jednocześnie zapewniając, że robot zmniejsza prędkość w pobliżu niebezpiecznego wyposażenia.
Wybór właściwego narzędzia do zadania
Ciekawym wnioskiem jest to, że żadna pojedyncza strategia sterowania nie była najlepsza we wszystkich sytuacjach. Na otwartych polach z łagodnymi łukami metoda dynamiczna wyraźnie przewyższała podejście tradycyjne, utrzymując tor ruchu robota ciasny i płynny nawet przy wyższych prędkościach. W ciasnej geometrii zakładu chemicznego jednak proste pure pursuit ze stałym lookaheadem czasami sprawdzało się lepiej, zwłaszcza na ostrych pętlach i trasach „ósemkowych” przecinających się, gdzie dynamiczny lookahead mógł przypadkowo skierować robota na niewłaściwy odcinek ścieżki. Autorzy wnioskują, że roboty powinny przełączać strategie w zależności od kształtu trasy: używać ulepszonego, zintegrowanego z bezpieczeństwem regulatora dla umiarkowanych zakrętów i jazdy uwzględniającej zagrożenia, a w razie bardzo ostrych lub pętlowych torów wracać do schematu o stałym lookaheadzie. Dla osób niebędących ekspertami kluczowym przesłaniem jest to, że bezpieczna i niezawodna nawigacja robotów w rzeczywistych zakładach i na polach to nie tylko dobre mapy i czujniki—tak samo istotne jest, gdzie robot „patrzy” i jak szybko się porusza.
Cytowanie: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
Słowa kluczowe: autonomiczne roboty mobilne, śledzenie ścieżki, kontrola skrętu, nawigacja GNSS-RTK, bezpieczeństwo w zakładach chemicznych