Clear Sky Science · pl
Lekka detekcja celów i śledzenie wielu obiektów dla inspekcji UAV w kopalniach odkrywkowych
Mądrzejsze oczy na niebie
Kopalnie odkrywkowe to rozległe, surowe tereny, po których wciąż poruszają się ciężarówki, koparki i ludzie. Utrzymanie bezpieczeństwa i płynności pracy zwykle wymaga wielu pracowników na ziemi oraz kosztownego sprzętu do pozycjonowania, a mimo to drobne usterki i intruzi mogą umykać uwadze. W artykule badano, jak lekkie, inteligentne drony mogą patrolować te kopalnie z powietrza, automatycznie wykrywając sprzęt, osoby i problemy w czasie rzeczywistym, działając w ramach ograniczeń obliczeniowych pokładowej elektroniki.
Dlaczego kopalnie potrzebują lepszych strażników
Nowoczesne kopalnie już korzystają z narzędzi takich jak pozycjonowanie satelitarne i specjalne radiowe beacony do śledzenia ciężarówek i maszyn. Jednak te „aktywne” systemy mają martwe pola: sygnały mogą być blokowane przez strome skarpy, pył lub zakłócenia, a działają tylko na pojazdy i osoby noszące odpowiednie urządzenia. Nie pokazują też, jak w praktyce wygląda usterka. Drony natomiast mogą przelatywać nad trudnym terenem, rejestrować bogaty materiał obrazowy i śledzić niekooperujące cele, takie jak pojazdy naruszające teren. Wyzwanie polega na tym, że wydajne algorytmy wizyjne zwykle wymagają ciężkich komputerów, podczas gdy drony mają ograniczenia wagowe, energetyczne i obliczeniowe. Autorzy postawili sobie za cel zaprojektowanie systemu detekcji i śledzenia, który będzie zarówno dokładny, jak i na tyle lekki, by działać bezpośrednio na dronie.
Nauczanie dronów rozpoznawania małych i ukrytych celów
Rdzeniem pracy jest ulepszona wersja popularnego modelu wizyjnego o nazwie YOLO, dopasowana specjalnie do warunków kopalni odkrywkowych. Badacze przeprojektowali „kręgosłup” modelu tak, by lepiej śledził nieregularne kontury ciężarówek, koparek i hałd skał, zamiast polegać na sztywnych, siatkowych filtrach. Przeprojektowali także część sieci łączącą informacje z grubych i drobnych skal obrazu, tak aby drobne, odległe maszyny i większe, bliskie obiekty były wychwytywane razem bez wzajemnego zagubienia. Ponadto nowy, lekki moduł decyzyjny koncentruje uwagę na najbardziej informacyjnych detalach sceny, pomagając systemowi odróżniać małe punkty awarii i częściowo zasłonięte maszyny od zatłoczonego tła.
Zmniejszanie rozmiarów mocnych modeli, by zmieściły się na dronie
Nawet przy tych usprawnieniach model wizyjny może łatwo stać się zbyt duży dla sprzętu dronowego. Aby temu zaradzić, zespół zastosował staranną strategię przycinania, analizując, które wewnętrzne połączenia najbardziej przyczyniają się do wydajności, a następnie usuwając pozostałe. Proces ten zmniejsza liczbę parametrów i ilość obliczeń, jednocześnie zachowując najsilniejsze ścieżki w sieci. Przy optymalnym poziomie przycięcia system utrzymuje wysoką dokładność detekcji, a jednocześnie redukuje rozmiar modelu, liczbę operacji i czas reakcji na tyle, by działać na kompaktowym procesorze wbudowanym, zużywając mniej energii i wydłużając czas lotu. Testy na niestandardowym zestawie danych z kopalni oraz na publicznym benchmarku dronów pokazują, że przycięty model przewyższa kilka znanych alternatyw, zwłaszcza w przypadku małych i częściowo ukrytych celów.
Od migawki do płynnych trajektorii
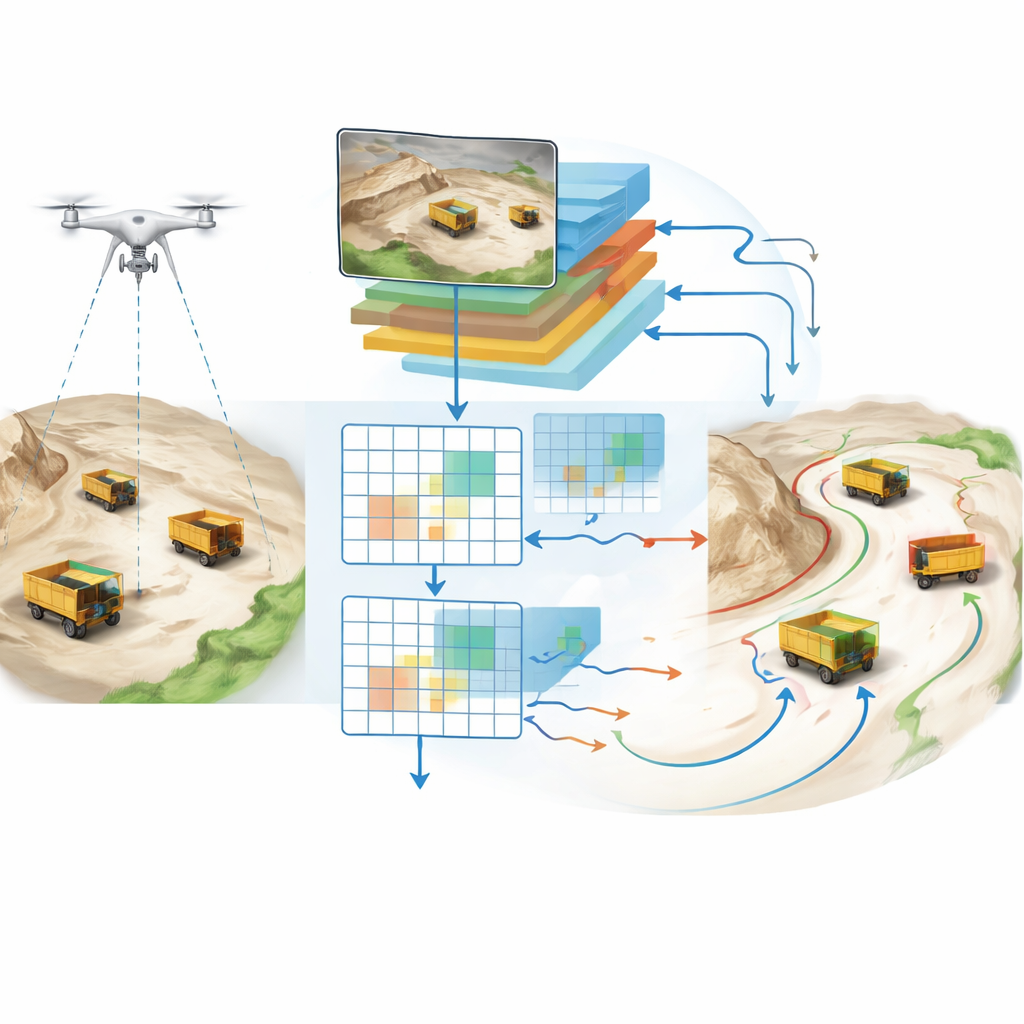
Wykrycie obiektu na pojedynczym obrazie to tylko połowa historii; kopalnie muszą też wiedzieć, jak każdy samochód czy osoba porusza się w czasie. W tym celu autorzy udoskonalili istniejące podejście do śledzenia wielu obiektów, tak aby lepiej radziło sobie z zatłoczonymi scenami, podobnymi pojazdami i nagłymi zmianami ruchu. Stworzyli złożoną miarę podobieństwa, która uwzględnia, gdzie znajduje się cel, jak wygląda, a nawet czy jest załadowany czy pusty. Skorygowali też przewidywania ruchu, by uwzględnić zmienne przyspieszenie, na przykład gdy ciężarówka skręca lub wspina się po stoku. Te kroki razem redukują zamiany tożsamości—gdy jeden pojazd mylony jest z innym—i utrzymują trajektorie płynne i wiarygodne, przy jednoczesnym zachowaniu szybkości wystarczającej do użycia w czasie rzeczywistym na sprzęcie klasy dronowej.
W kierunku bezzałogowych, ciągłych patroli kopalni
Na koniec autorzy umieścili swoje moduły wizyjne i śledzące w wielowarstwowym systemie inspekcyjnym, który może koordynować kilka dronów, przesyłać dane przez 5G i łącza ad-hoc oraz przekazywać wyniki do centrum kontroli. W eksperymentach nad rzeczywistymi kopalniami takie rozwiązanie wyraźnie poprawiło dokładność i stabilność monitorowania sprzętu w porównaniu z metodami tradycyjnymi. Dla osób niebędących specjalistami kluczowy wniosek jest taki, że badanie pokazuje praktyczną drogę do tego, by małe, wydajne latające roboty nieustannie nadzorowały ogromne zakłady przemysłowe, wykrywając drobne usterki, niezarejestrowanych gości i niebezpieczne sytuacje zanim eskalują—bez potrzeby stosowania masywnych komputerów czy gęstej sieci beaconów na każdym pojeździe.
Cytowanie: Liu, G., Zhang, L., Lei, J. et al. Lightweight target detection and multi target tracking for UAV inspection in open pit mines. Sci Rep 16, 8084 (2026). https://doi.org/10.1038/s41598-026-38676-4
Słowa kluczowe: inspekcja dronem, górnictwo odkrywkowe, detekcja obiektów, śledzenie wielu obiektów, lekkie modele AI