Clear Sky Science · pl
System rozmy typu 3 oparty na strukturze wirtualnej do predykcyjnego wykrywania, kompensacji i sterowania w przypadku uszkodzeń czujników i aktuatorów w układach nieliniowych
Utrzymanie maszyn na kursie, gdy elementy zawodzą
Nowoczesne technologie — od ramion robotycznych na halach produkcyjnych po zakłady chemiczne regulujące kwasowość — polegają na czujnikach i aktuatorach, które dyskretnie utrzymują pracę systemu. Gdy te elementy dryfują, zacinają się lub zawodzą, system może stać się niebezpieczny dużo wcześniej, niż ktokolwiek to zauważy. W artykule przedstawiono nowy sposób, który pozwala maszynom wykrywać i korygować takie problemy samodzielnie, nawet gdy inżynierowie nie dysponują dokładnym modelem matematycznym wewnętrznego działania układu.
Dlaczego ukryte problemy są trudne do wykrycia
W wielu rzeczywistych zastosowaniach zachowanie układu jest silnie nieliniowe: drobne zmiany wejścia mogą wywołać duże, nieoczekiwane skoki wyjścia. Tradycyjne metody sterowania zakładają, że projektanci znają równania opisujące to zachowanie i że czujniki oraz aktuatory w większości działają prawidłowo. W praktyce komponenty się zużywają, generują szum lub są wymieniane na nieco inny sprzęt. Konwencjonalne rozwiązania odporne na uszkodzenia albo wprowadzają stałe marginesy bezpieczeństwa (metody pasywne), albo polegają na dokładnych modelach do wykrywania i kompensacji usterek (metody aktywne). Oba podejścia mają trudności, gdy układ zmienia się w czasie lub gdy jego wewnętrzne działanie nie jest w pełni znane. Autorzy argumentują, że przemysł potrzebuje regulatorów uczących się na żywo, rozpoznających, kiedy czujniki albo aktuatory źle się zachowują, i korygujących te usterki w czasie rzeczywistym bez potrzeby szczegółowego planu systemu.
Sterownik uczący się, traktujący układ jak czarną skrzynkę
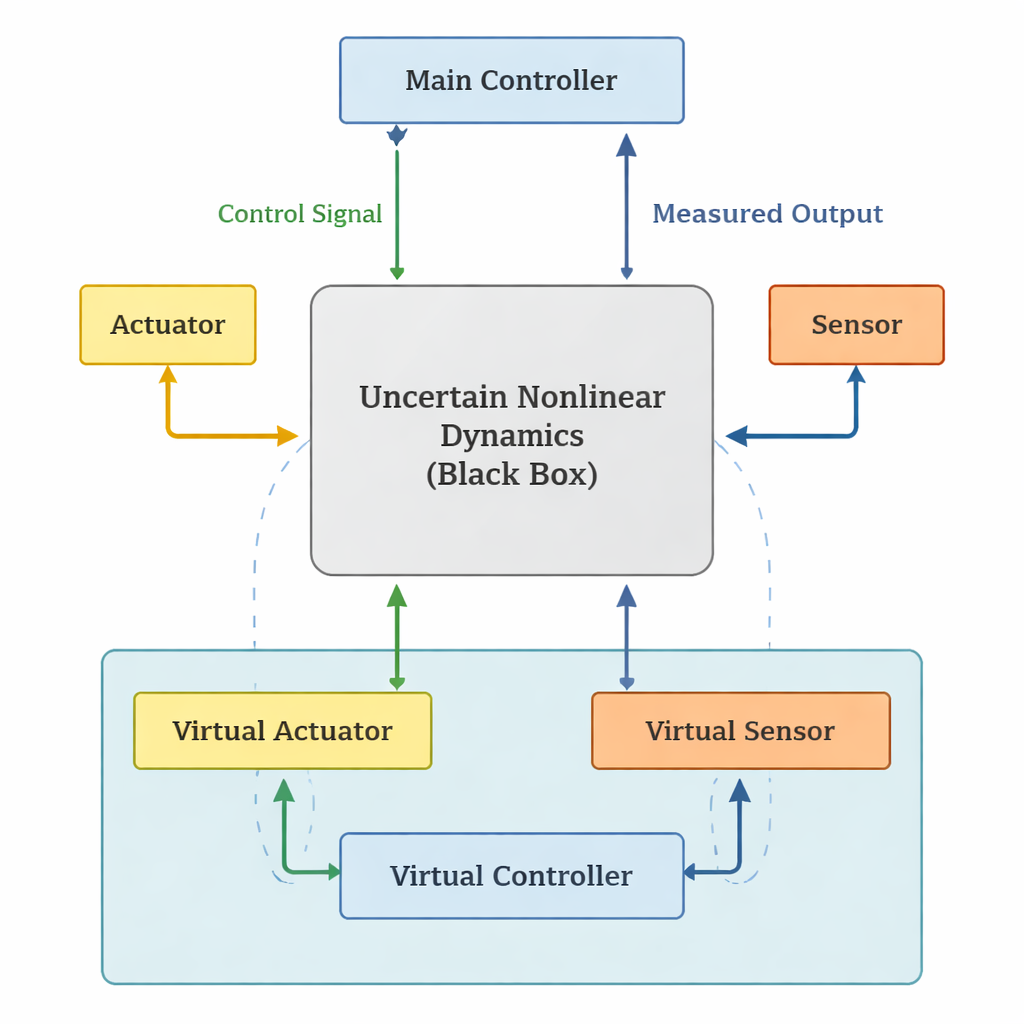
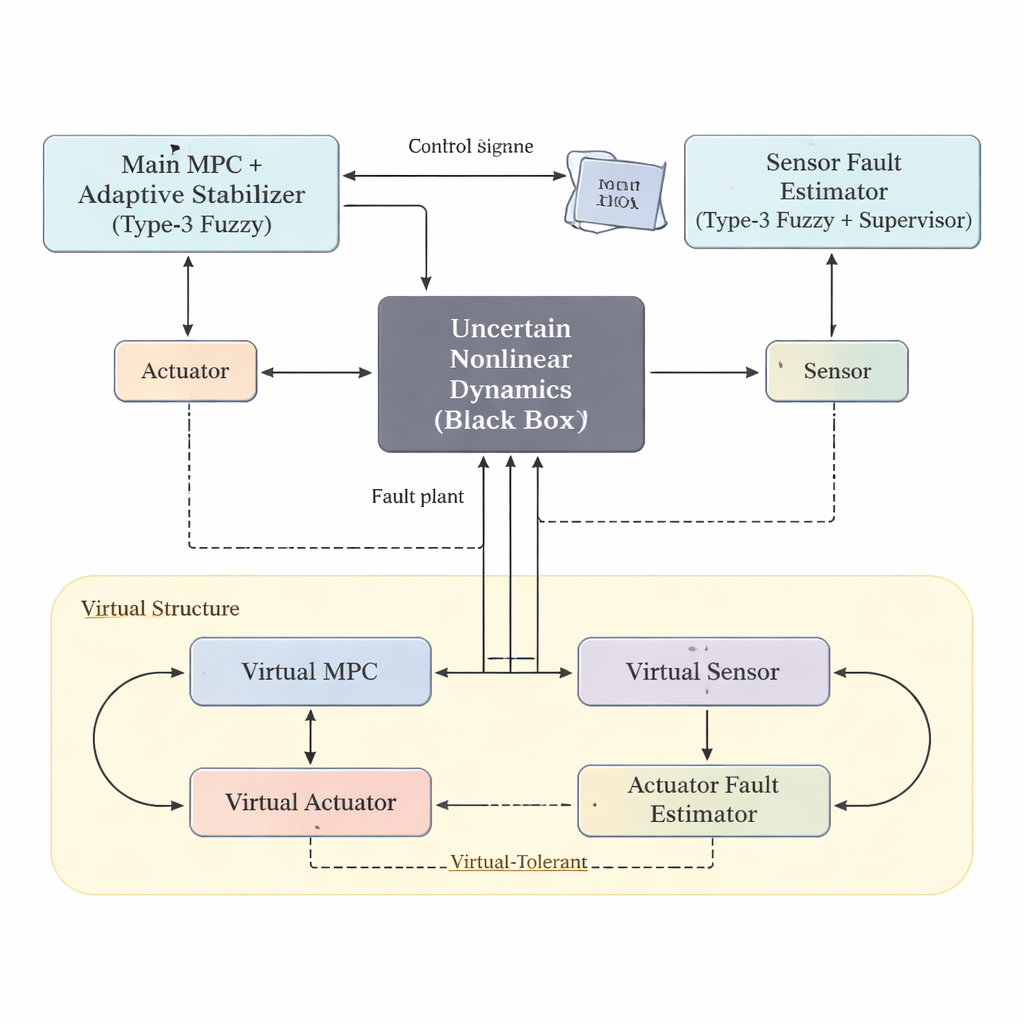
Proponowane rozwiązanie traktuje obiekt wyłącznie jak czarną skrzynkę: widzi jedynie sygnały sterujące wysyłane do układu oraz wyjścia mierzone przez czujniki. W jego rdzeniu znajduje się system logiki rozmytej typu 3, zaawansowana forma modelowania rozmytego zaprojektowana do radzenia sobie z silną niepewnością i szumem pomiarowym. System ten uczy się zwartego opisu wejście–wyjście nieznanej dynamiki online, podczas gdy predykcyjny regulator modelowy (MPC) wykorzystuje wyuczony model do planowania przyszłych działań sterujących na krótkim horyzoncie. Równolegle działa jednostka adaptacyjna stabilizująca, zapewniająca, że nawet gdy model jest niedoskonały lub parametry ulegają dryfowi, złożone sprzężenie zwrotne utrzymuje błędy śledzenia ograniczone i ostatecznie dąży do zera.
Obserwowanie obserwatorów: wykrywanie uszkodzeń czujników i aktuatorów
Ramka dzieli obsługę usterek na dwie skoordynowane części. Po pierwsze, jednostka detekcji uszkodzeń czujników wykorzystuje dwa dodatkowe estymatory rozmyte typu 3 oraz blok nadzorczy do wnioskowania, o ile wskazanie czujnika odchyliło się od oczekiwanej wartości stanu ustalonego. Na tej podstawie generuje sygnał korygujący, który skutecznie „odgina” błędny pomiar tak, by główny regulator nadal otrzymywał wiarygodne wyjście. Po drugie, metoda buduje wirtualną strukturę, która odzwierciedla rzeczywisty system: zawiera wirtualny czujnik, wirtualny aktuator, własny identyfikator rozmyty i wirtualny MPC. Ponieważ pętla wirtualna nie cierpi z powodu degradacji rzeczywistego aktuatora, różnice między ścieżkami sterowania wirtualną i rzeczywistą ujawniają, jak bardzo rzeczywisty aktuator zawodzi. Prosty wzór przekłada tę różnicę na oszacowany poziom usterki, który następnie jest kompensowany w głównym sygnale sterującym.
Dowód stabilności i testy na robotach i zbiornikach chemicznych
Aby wykazać, że podejście jest nie tylko intuicyjne, lecz także matematycznie poprawne, autorzy konstruują funkcję Lyapunowa — swego rodzaju miarę energii — obejmującą błędy śledzenia, błędy modelowania oraz regulowane parametry rozmyte. Wyprowadzają prawa aktualizacji dla terminów adaptacyjnych tak, by ta energia stale malała, demonstrując, że błędy kurczą się w czasie nawet w obecności zakłóceń i usterek. W symulacjach metoda jest testowana na dwóch bardzo różnych przykładach: jednostopniowym ramieniu robotycznym oraz procesie neutralizacji pH w zbiorniku chemicznym. W obu przypadkach rzeczywista dynamika traktowana jest jako całkowicie nieznana, parametry się zmieniają, a w trakcie działania wprowadzane są zarówno uszkodzenia czujników, jak i aktuatorów. Regulator utrzymuje dokładne śledzenie, szybko uczy się wielkości usterek i utrzymuje niskie miary ryzyka i błędów, przewyższając prostsze regulatory rozmyte i inne zaawansowane schematy odporne na uszkodzenia opisane w literaturze.
Co to oznacza dla rzeczywistych systemów
Dla osób niebędących specjalistami kluczowe przesłanie jest takie, że ta metoda daje złożonym systemom swego rodzaju wrodzoną samoświadomość. Zamiast polegać na idealnym modelu czy ręcznym dostrajaniu przez inżynierów, regulator ciągle uczy się z obserwowanych danych, dostrzega, kiedy czujniki lub aktuatory zaczynają fałszować odczyty lub słabnąć, i automatycznie koryguje swoje działania, by utrzymać stabilność wydajności. Ponieważ potrzebuje jedynie danych wejściowych i wyjściowych, w zasadzie można ją zastosować do wielu różnych maszyn bez przeprojektowywania wszystkiego od podstaw. Choć wyniki opierają się na symulacjach i kwestie praktyczne związane ze sprzętem wciąż wymagają zbadania, praca ta wskazuje drogę do bardziej odpornych robotów, procesów przemysłowych i innych systemów autonomicznych, które pozostają niezawodne nawet gdy ich komponenty i otoczenie są dalekie od idealnych.
Cytowanie: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
Słowa kluczowe: sterowanie odporne na uszkodzenia, logika rozmyta, predykcyjne sterowanie modelowe, uszkodzenia czujników i aktuatorów, układy nieliniowe