Clear Sky Science · pl
Ulepszona sieć YOLOv11 do wykrywania odpadów morskich w środowisku podwodnym
Dlaczego wykrywanie śmieci pod wodą ma znaczenie
Długo pod powierzchnią oceanu worki plastikowe, butelki, żyłki i inne odpady gromadzą się niemal niezauważalnie. Ten śmieć szkodzi życiu morskiemu, zatyka wrażliwe siedliska i może nawet utrudniać pracę podwodnych robotów, których naukowcy używają do badań i ochrony morza. Artykuł streszczony tutaj opisuje bardziej zaawansowany system widzenia komputerowego, który pomaga kamerom i robotom automatycznie odnajdywać i oznaczać podwodne odpady w czasie rzeczywistym, nawet w mętnej, zagraconej wodzie.
Trudność w wyraźnym widzeniu pod wodą
W przeciwieństwie do jasnych zdjęć na lądzie, obrazy podwodne często są ciemne, zamglone i zabarwione na niebiesko lub zielono. Światło szybko zanika wraz z głębokością, piasek i plankton mącą wodę, a przedmioty będące śmieciami bywają małe, częściowo ukryte lub podobne do skał i roślin. Tradycyjne metody przetwarzania obrazu mają trudności w takich warunkach, a nawet nowoczesne detektory uczące się głęboko mogą przeoczyć drobne obiekty albo pomylić teksturę tła z odpadami. Tymczasem precyzyjne i szybkie wykrywanie jest kluczowe do mapowania zanieczyszczeń, kierowania robotami sprzątającymi i śledzenia, jak odpady morskie zmieniają się w czasie.
Budowanie na szybkim narzędziu widzenia
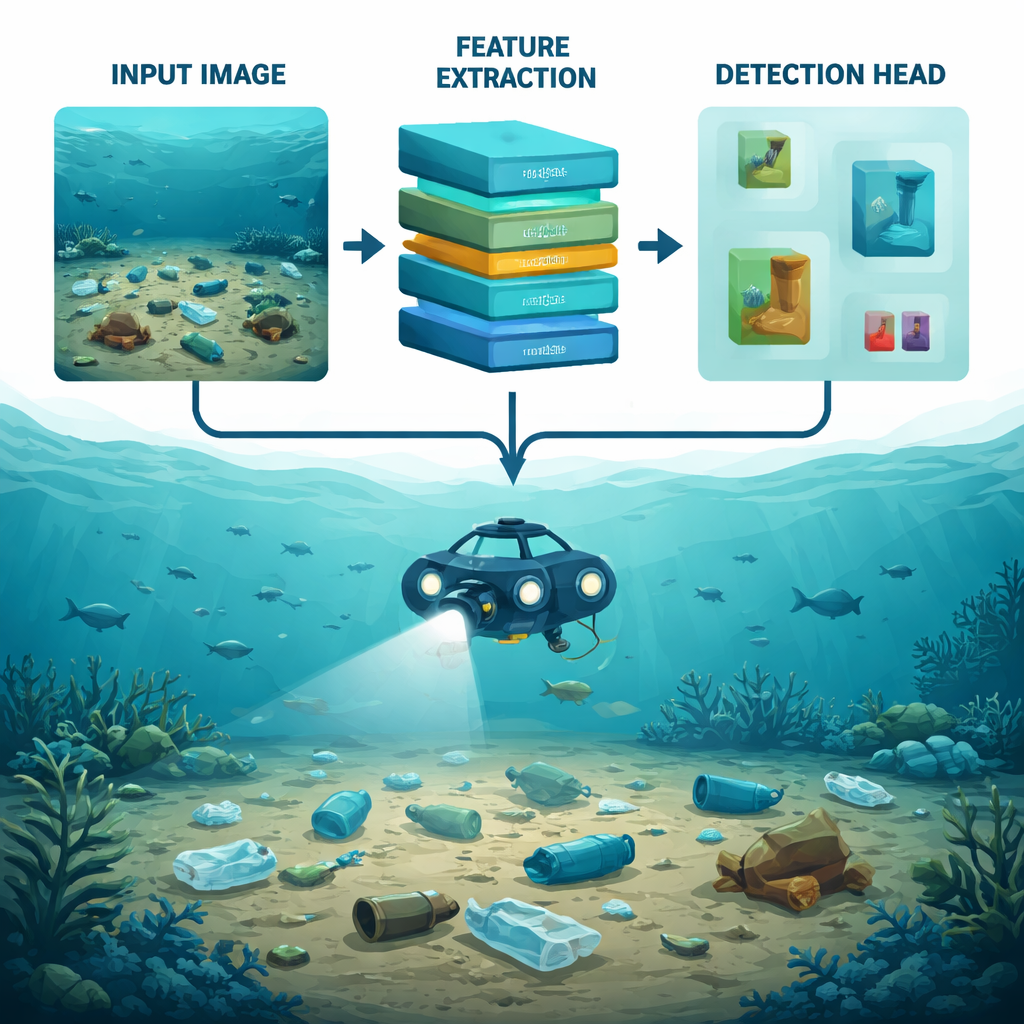
Autorzy opierają się na YOLOv11, niedawnym członku rodziny detektorów „You Only Look Once”. Modele YOLO są popularne, ponieważ raz przeglądają obraz i przewidują położenia oraz typy wielu obiektów w czasie rzeczywistym. Jednak standardowa konstrukcja YOLOv11 została stworzona z myślą o typowych scenach, takich jak ulice czy zdjęcia wnętrz, a nie o wizualnie surowym świecie podwodnym. Aby zmniejszyć tę lukę, badacze przeprojektowali dwa kluczowe fragmenty sieci: sposób, w jaki najpierw wydobywa wzorce wizualne z obrazu, oraz sposób, w jaki później decyduje, które fragmenty są istotnymi odpadami, a które to jedynie szum tła.
Nowy sposób wyłapywania detali w różnych rozmiarach
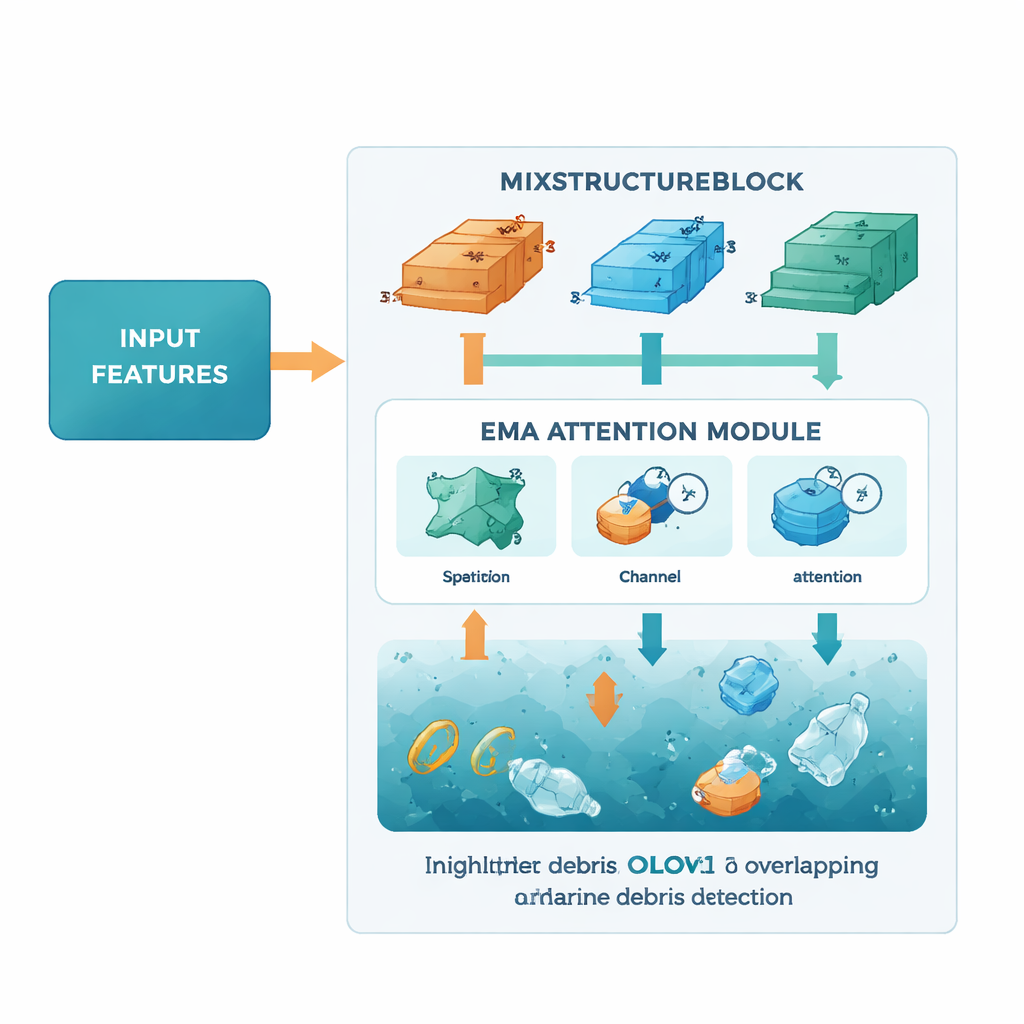
Pierwszą poprawką jest moduł o nazwie MixStructureBlock, który zastępuje standardowy blok konstrukcyjny w rdzeniu YOLOv11. Zamiast wykorzystywać jeden stały schemat filtrów, MixStructureBlock uruchamia kilka gałęzi równolegle, które patrzą na scenę z różnymi „rozmiarami okien” i odstępami. To pomaga sieci zauważyć zarówno drobne detale, jak krawędź zakrętki butelki, jak i większe kształty, jak unoszący się worek. Ponadto blok zawiera proste mechanizmy uwagi, które uczą się podkreślać informacyjne kolory i lokalizacje, przy jednoczesnym tłumieniu nieistotnych fragmentów tła. Efektem jest bogatszy, czystszy zestaw cech, które ułatwiają dostrzeżenie małych, słabo widocznych kawałków odpadów.
Nauka, gdzie sieć ma się skupić
Drugie ulepszenie to moduł Efficient Multi-scale Attention (EMA), dodany dalej w sieci, tam gdzie dokonywane są detekcje. EMA przygląda się mapom cech zarówno w przestrzeni, jak i po kanałach, zadając w praktyce dwa pytania jednocześnie: „Gdzie na obrazie dzieje się coś ważnego?” oraz „Które typy wzorców są obecnie najbardziej istotne?” Poprzez łączenie informacji na wielu skalach i wykorzystanie lekkich operacji matematycznych, EMA zaostrza koncentrację sieci na prawdopodobnych obszarach z odpadami — takich jak nachodzące na siebie obiekty czy słabo widoczne przedmioty daleko od kamery — przy jednoczesnym zachowaniu kompaktowości i szybkości modelu wystarczającej do pracy w czasie rzeczywistym na wbudowanym sprzęcie.
Testowanie systemu
Aby ocenić swój projekt, zespół trenował i testował model na TrashCan, dużej publicznej kolekcji głębinowych zdjęć zebranej w Japonii. Jedna wersja zbioru danych oznacza odpady według konkretnego typu obiektu (jak kubek, worek czy metalowa rura), podczas gdy inna grupuje przedmioty według materiału (jak plastik czy tkanina). W obu wersjach ulepszona sieć przewyższa kilka silnych punktów odniesienia, w tym oryginalne YOLOv11, wcześniejsze systemy do wykrywania odpadów morskich oraz inne odmiany YOLO ukierunkowane na środowisko podwodne. Nie tylko wykrywa poprawnie więcej odpadów, zwłaszcza małych i ciasno ułożonych, ale robi to przy zauważalnie małym rozmiarze modelu — około 5 megabajtów — co jest dobrze dopasowane do pojazdów podwodnych o ograniczonej mocy.
Co to oznacza dla czystszych oceanów
Mówiąc prosto, badanie pokazuje, że przemyślane przeprojektowanie sposobu, w jaki SI „patrzy” na obrazy podwodne, może znacząco poprawić wykrywanie śmieci pod falami. Łącząc wieloskalowe wydobywanie wzorców z inteligentną uwagą na ważne regiony, proponowany system odnajduje więcej odpadów, zachowując przy tym efektywność wystarczającą do pracy w czasie rzeczywistym. Wdrożony w systemach kamer i podwodnych robotach, taki sprzęt mógłby pomóc naukowcom i agencjom ochrony środowiska w mapowaniu miejsc o dużym natężeniu zanieczyszczeń, kierowaniu akcjami sprzątania i monitorowaniu, czy polityki ograniczające zaśmiecanie morza przynoszą efekty — przybliżając nas do zdrowszych oceanów.
Cytowanie: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
Słowa kluczowe: wykrywanie odpadów morskich, robotyka podwodna, detekcja obiektów, uczenie głębokie, zanieczyszczenie oceanów