Clear Sky Science · pl
Badania nad metodą pozycjonowania przy sortowaniu paczek w nieuporządkowanej logistyce
Dlaczego inteligentniejsze sortowanie paczek ma znaczenie
Każde złożone przez ciebie zamówienie uruchamia ukryty balet pudełek w ogromnych centrach logistycznych. Zanim paczka popędzi ku twoim drzwiom, trzeba ją odnaleźć, podnieść, zmierzyć, zeskanować i skierować dalej — często z chaotycznej sterty różnych przesyłek. Dziś wiele z tych pierwszych etapów „rozpakowywania chaosu” wciąż opiera się na pracy ludzi wykonujących powtarzalne, męczące czynności. W artykule przedstawiono nową metodę opartą na widzeniu, która pomaga robotom wiarygodnie odnaleźć punkty chwytu dla każdej paczki w stosie, przybliżając nas do w pełni zautomatyzowanego, szybszego i mniej pracochłonnego sortowania.
Z bałaganu do danych przyjaznych dla robotów
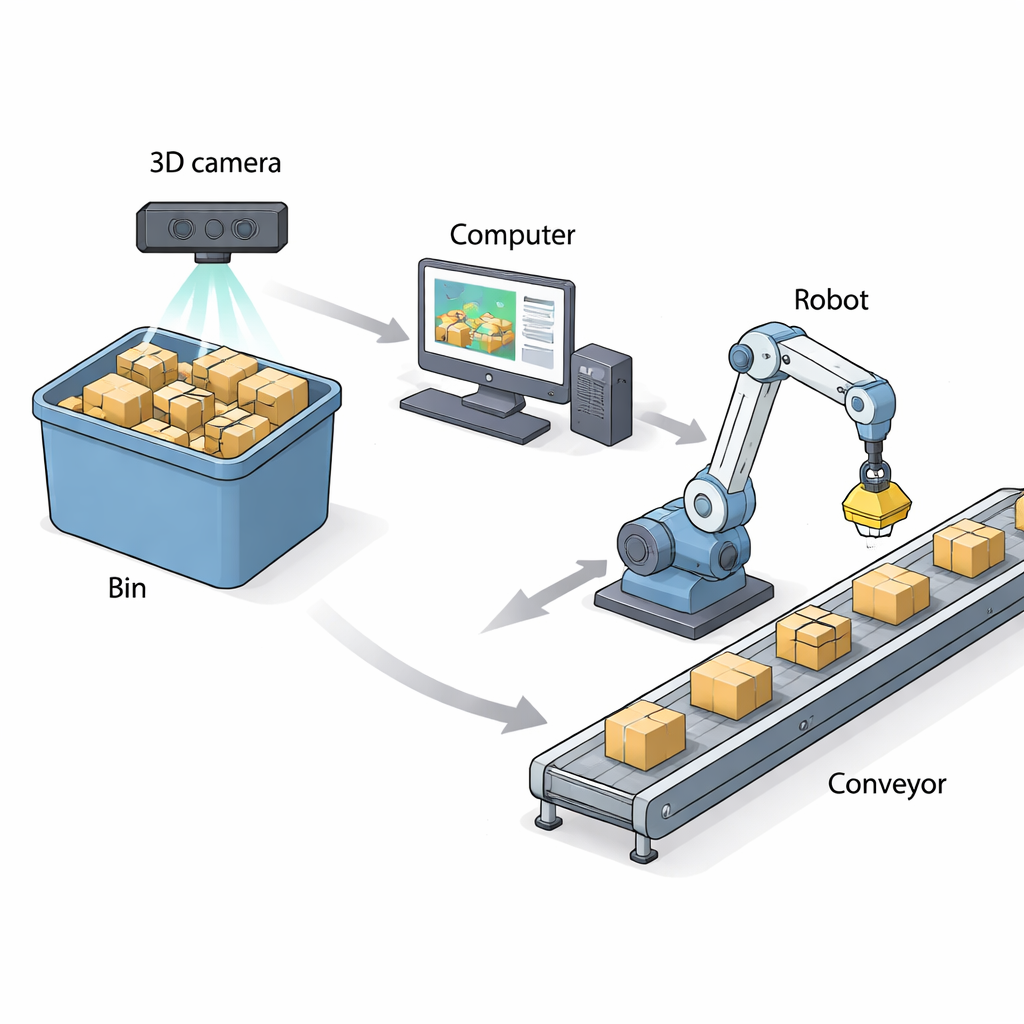
Naukowcy skupiają się na tym, co nazywają „nieuporządkowanymi” przesyłkami logistycznymi: codziennymi pudełkami i miękkimi kopertami wrzuconymi do pojemników bez szczególnego porządku, czasem zgniecionymi lub wygiętymi pod naciskiem innych. Aby zastąpić pracowników w takim środowisku, robot najpierw musi wiedzieć dokładnie, gdzie sięgnąć i jak ustawić chwytak względem powierzchni docelowej paczki. Zespół zbudował system wokół kamery 3D, która rejestruje zarówno obraz kolorowy, jak i mapę głębokości górnej warstwy paczek. Nowoczesna sieć rozpoznawcza (oparta na YOLOv8) wykrywa pojedyncze przesyłki na obrazie kolorowym, a mapa głębokości ujawnia ich trójwymiarowy kształt. To połączenie pozwala komputerowi wybrać najlepszą paczkę do chwycenia — taką, która nie jest zbyt zasłonięta i znajduje się wystarczająco daleko od krawędzi pojemnika — a następnie obliczyć dokładny punkt chwytu.
Znalezienie stabilnego punktu chwytu przy pomocy trzech punktów i cienia
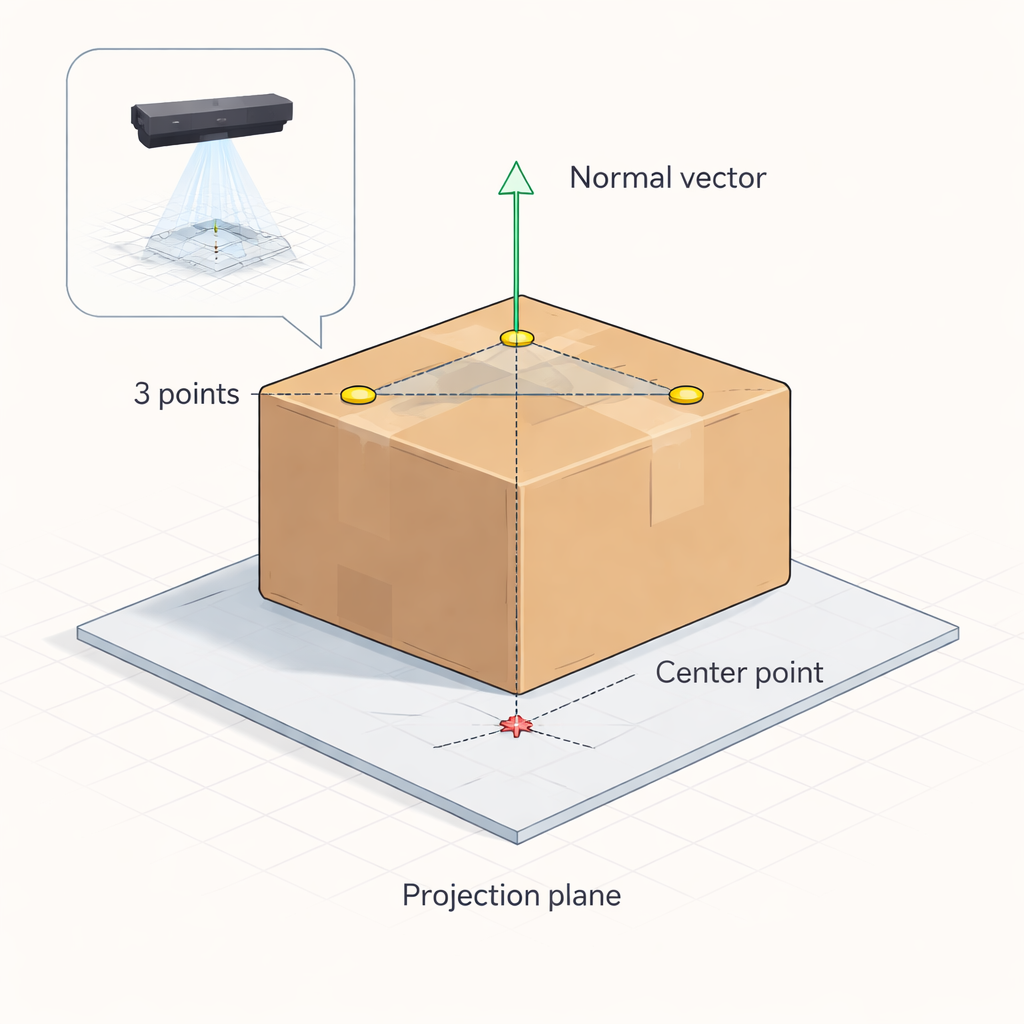
W sercu metody leży geometryczny trik, który autorzy nazywają algorytmem centrowania orientacji‑projekcji na trzech punktach. Gdy wybiorą paczkę, system losowo wybiera trzy punkty na jej górnej powierzchni na podstawie danych głębokości. Te trzy punkty definiują płaszczyznę, tak jak trzy pinezki na stole określają jego pochylenie. Z tej płaszczyzny algorytm oblicza kierunek normalny — prostą wystającą prostopadle do powierzchni paczki. Równolegle system wykorzystuje cztery górne narożniki paczki na obrazie, aby wywnioskować geometryczne centrum jej rzutowanego obrysu, podobnie jak znajdowanie środka cienia prostokąta. Połączenie orientacji płaszczyzny z tym punktem środka daje precyzyjną pozycję chwytu 3D oraz pochylenie górnej powierzchni paczki, co może kierować przyssawką lub chwytakiem robota.
Radzenie sobie ze zgniecionymi i wypukłymi paczkami
Prawdziwe przesyłki nie są idealnymi prostopadłościanami: koperty z folią bąbelkową opadają, miękkie torby wypukleją, a kartony tekturowe mogą się odkształcać pod obciążeniem. Proste założenie o płaskiej powierzchni zawiodłoby w takich przypadkach. Aby temu sprostać, autorzy rozszerzają model matematyczny, rozróżniając trzy sytuacje: paczki niemal płaskie, o powierzchniach wypukłych (wypuklenia) oraz wklęsłych (opadanie). Porównując najwyższe i najniższe wartości głębokości na powierzchni paczki, system najpierw ocenia, czy jest ona znacząco odkształcona. Jeśli tak, analizuje przecięcie zdeformowanej powierzchni z wyimaginowaną płaszczyzną odniesienia i dopasowuje przybliżoną elipsę do tego przecięcia. Na tej podstawie wyznacza „optymalną” płaszczyznę najlepiej reprezentującą stabilną powierzchnię chwytu — nawet jeśli rzeczywista góra paczki się zapada lub wypukla — i następnie rzutuje kluczowy punkt chwytu z powrotem na tę płaszczyznę.
Testy algorytmu
Aby sprawdzić, czy matematyka działa w praktyce, zespół zbudował stanowisko testowe z sześcioprzegubowym robotem przemysłowym, kamerą 3D i niestandardowym urządzeniem laserowo‑sondowym. Najpierw oznaczyli rzeczywisty geometryczny środek górnej powierzchni każdej testowej paczki i użyli dwóch wiązek laserowych, aby wskazać tę fizyczną lokalizację w przestrzeni. Następnie pozwolili algorytmowi wzrokowemu obliczyć własne oszacowanie tego samego środka i nakazali robotowi przesunięcie drugiej sondy do obliczonego punktu. Mierząc drobne przesunięcie między końcówkami dwóch sond, mogli obliczyć błąd pozycjonowania. Testy zarówno na sztywnych modelach drewnianych pudeł, jak i na realistycznych materiałach opakowaniowych — karton falisty, koperty z folią bąbelkową i plastikowe torby, w rozmiarach do 250×250 mm — wykazały maksymalny błąd pozycjonowania około 1,7 milimetra i średnie błędy bliskie 1 milimetrowi na oś. Pełne obliczenie dla każdej paczki zajmowało około 17,5 milisekundy, co jest wystarczająco szybkie dla linii sortujących o dużej przepustowości.
Co to oznacza dla przyszłych magazynów
Mówiąc prościej, badanie pokazuje, że robot wyposażony w kamerę 3D i ten trójpunktowy, oparty na projekcji algorytm może wiarygodnie określić gdzie i jak chwycić paczki z nieuporządkowanego pojemnika z precyzją rzędu milimetrów. Choć silne odkształcenia bardzo miękkich paczek nadal nieco obniżają dokładność, metoda pozostaje wystarczająco odporna w realistycznych warunkach magazynowych. W miarę jak wolumen przesyłek rośnie, a braki kadrowe utrzymują się, takie algorytmy mogą pozwolić przenieść najcięższe i najbardziej monotonne zadania sortowania z ludzi na maszyny — przyczyniając się do bezpieczniejszej, mniej monotonnej pracy i płynnego funkcjonowania rosnącego rynku e‑commerce.
Cytowanie: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
Słowa kluczowe: wizja 3D, sortowanie paczek, robotyczne chwytanie, automatyzacja logistyki, lokalizacja obiektów