Clear Sky Science · pl
Estymatory rozmyte H_\infty dla sterowania próbkowanych nieliniowych parabolicznych równań różniczkowych cząstkowych
Utrzymywanie złożonych systemów w stanie równowagi
Wiele systemów fizycznych i biologicznych — na przykład przepływ ciepła w pręcie metalowym, rozprzestrzenianie się substancji w reakcji chemicznej czy sygnały przemieszczające się przez tkankę — zmienia się zarówno w czasie, jak i w przestrzeni. Takie systemy trudno utrzymać w stabilnym stanie, szczególnie gdy występują rzeczywiste szumy i zaburzenia. W artykule przedstawiono nową metodę projektowania cyfrowych regulatorów, które utrzymują takie systemy stabilne i odporne na zakłócenia, pozostając jednocześnie praktycznymi do wdrożenia na współczesnych komputerach i mikrokontrolerach.
Dlaczego ważne są zarówno przestrzeń, jak i czas
W codziennych problemach sterowania inżynierowie często modelują systemy za pomocą zwykłych równań różniczkowych, gdzie zmienne zależą tylko od czasu. Jednak wiele istotnych zjawisk — od temperatury w piecu po stężenia chemikaliów w reaktorze — zależy także od położenia. Lepiej opisują je równania różniczkowe cząstkowe, które śledzą, jak wielkości ewoluują w przestrzeni i czasie. Takie modele są potężne, ale matematycznie wymagające, zwłaszcza gdy zachowanie układu jest nieliniowe i podlega losowym zaburzeniom oraz szumom pomiarowym.
Od reguł rozmytych do zarządzalnego modelu
Aby okiełznać tę złożoność, autorzy wykorzystują ramy modelowania rozmytego znane jako podejście Takagi–Sugeno (T–S). Zamiast pracować bezpośrednio z jednym skomplikowanym równaniem nieliniowym, przybliżają układ przez płynne łączenie kilku prostszych modeli liniowych, z których każdy jest ważny w lokalnym obszarze pracy. Te elementy są powiązane regułami „jeżeli–to” w sensie rozmytym, przekształcając trudny do analizy nieliniowy układ równań różniczkowych cząstkowych w uporządkowaną rodzinę układów liniowych. Badacze starannie uwzględniają niewielkie błędy wprowadzone przez to przybliżenie, zapewniając, że nie podważają one stabilności ani osiągów.
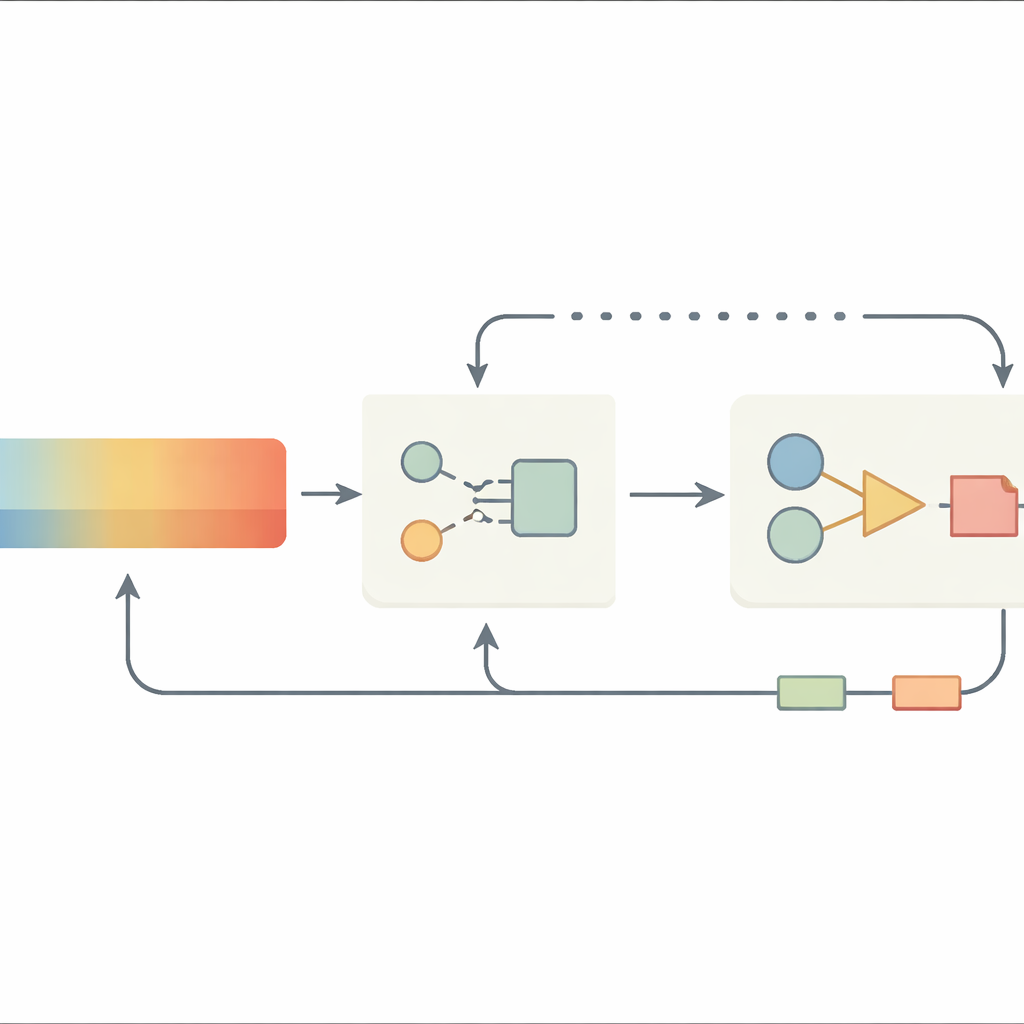
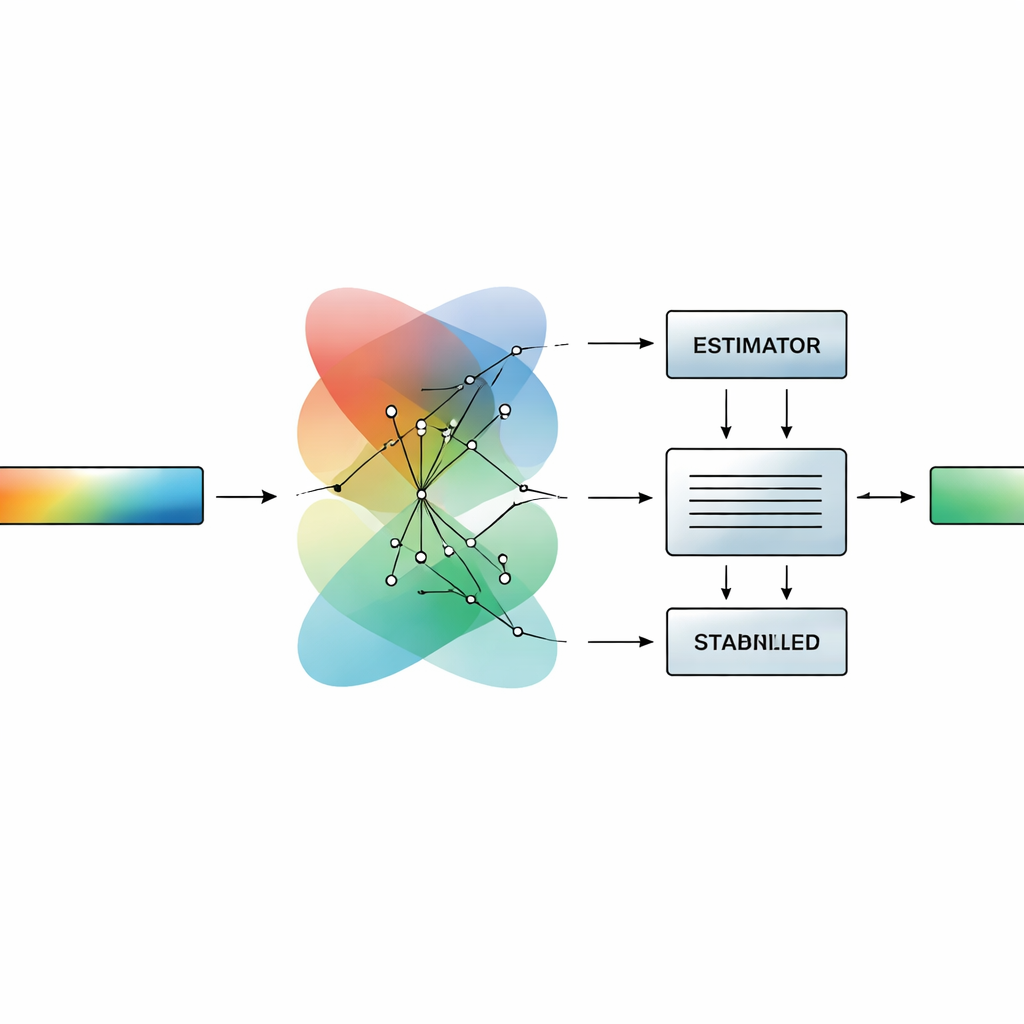
Sterowanie cyfrowe oparte na próbkowaniu w czasie
Współczesne regulatory są zwykle realizowane na sprzęcie cyfrowym, który aktualizuje działania sterujące w dyskretnych momentach czasu zamiast ciągle. Takie zachowanie „próbkowanych danych” może samo w sobie wprowadzać wyzwania, na przykład opóźnienia i nagłe zmiany między aktualizacjami. W artykule zaprojektowano regulator, który explicite uwzględnia tę próbkowaną naturę. Opiera się na estymatorze, który rekonstruuje stan wewnętrzny systemu rozproszonego z zaszumionych pomiarów, oraz na rozmytym prawie sprzężenia zwrotnego, które oblicza sygnał sterujący przy każdym kroku próbkowania. Traktując efekt próbkowania jako opóźnienie czasowe w kanale sterowania, autorzy budują ramy matematyczne opisujące, jak te cyfrowe aktualizacje oddziałują z przestrzennie rozproszoną dynamiką.
Gwarantowanie odpornej wydajności
Prawdziwe systemy nigdy nie są całkowicie wolne od zakłóceń: zewnętrzne perturbacje, szumy czujników i niepewności modelowe mogą pogorszyć działanie. Aby temu sprostać, autorzy przyjmują miarę wydajności w stylu H-infinity, która wymaga, aby regulator utrzymywał wpływ zaburzeń poniżej zadanej wartości dla wszystkich dopuszczalnych sygnałów szumu. Wykorzystując współczesne narzędzia teorii stabilności — takie jak funkcjonały Lyapunowa, nierówności całkowe oraz formułę obsługującą termy dyfuzji — wyprowadzają warunki, przy których układ zamknięty jest nie tylko stabilny w czasie, ale też odporny na zaburzenia. Kluczowe jest przedstawienie tych warunków jako liniowych nierówności macierzowych, standardowego formatu optymalizacyjnego, który można efektywnie sprawdzić i rozwiązać przy użyciu gotowego oprogramowania, np. toolboxu LMI w MATLAB-ie.
Testowanie metody na oscylującej reakcji chemicznej
Aby wykazać, że teoria działa także poza papierowymi rozważaniami, autorzy zastosowali swoją metodę do reakcji Belousova–Żabotyńskiego, klasycznego oscylującego układu chemicznego, którego fale przypominają te spotykane w tkankach biologicznych, takich jak serce. Zmodelowali reakcję jako proces rozproszony przestrzennie, a następnie zaprojektowali próbkowany estymator rozmyty i regulator zgodnie z proponowanymi kryteriami. Symulacje numeryczne pokazują, że regulator doprowadza układ do stabilnego zachowania, zarówno bez zaburzeń, jak i przy obecności znacznego szumu zewnętrznego. Metoda przewyższa też kilka wcześniejszych podejść pod względem poziomu zaburzeń, które jest w stanie tolerować przy zachowaniu stabilności.
Co to oznacza w praktyce
Mówiąc prosto, praca pokazuje, jak zaprojektować cyfrowy regulator, który może niezawodnie stabilizować złożone procesy rozłożone w przestrzeni, nawet gdy system jest nieliniowy i podlega zakłóceniom. Łącząc modelowanie rozmyte, estymator rekonstruujący ukryte stany oraz miarę odpornej wydajności, autorzy przedstawiają przepis, który inżynierowie mogą zaimplementować przy użyciu standardowych narzędzi numerycznych. To otwiera drogę do bardziej niezawodnego sterowania procesami, od reaktorów chemicznych po zaawansowane systemy termiczne i biologiczne, przy użyciu regulatorów działających efektywnie na współczesnym sprzęcie cyfrowym.
Cytowanie: Sivakumar, M., Dharani, S. & Cao, J. Sampled-data fuzzy \(H_\infty\) estimators for control of nonlinear parabolic partial differential equations. Sci Rep 16, 9010 (2026). https://doi.org/10.1038/s41598-026-37959-0
Słowa kluczowe: sterowanie rozmyte, systemy próbkowane, systemy o parametrach rozproszonych, odporna stabilizacja, reakcja Belousova–Żabotyńskiego