Clear Sky Science · pl
Rekonfigurowalna analiza i optymalizacja przestrzeni roboczej modułowego równoległego robota zawieszonego na linach
Roboty poruszające się po niewidocznych szynach
Wyobraź sobie robota, który może gładko przesuwać ciężką kamerę po stadionie, podnosić materiały budowlane nad placem budowy lub prowadzić urządzenie rehabilitacyjne wokół pacjenta, a wszystko to wisząc na linach zamiast poruszać się po sztywnych ramionach. W artykule przedstawiono nowy typ robota zawieszonego na linach, którego strukturę można dowolnie przekształcać, dzięki czemu jedna maszyna może dopasować się do wielu różnych zadań, wykorzystując przy tym przestrzeń roboczą w sposób najbardziej efektywny.
Budowanie robota z wymiennych elementów
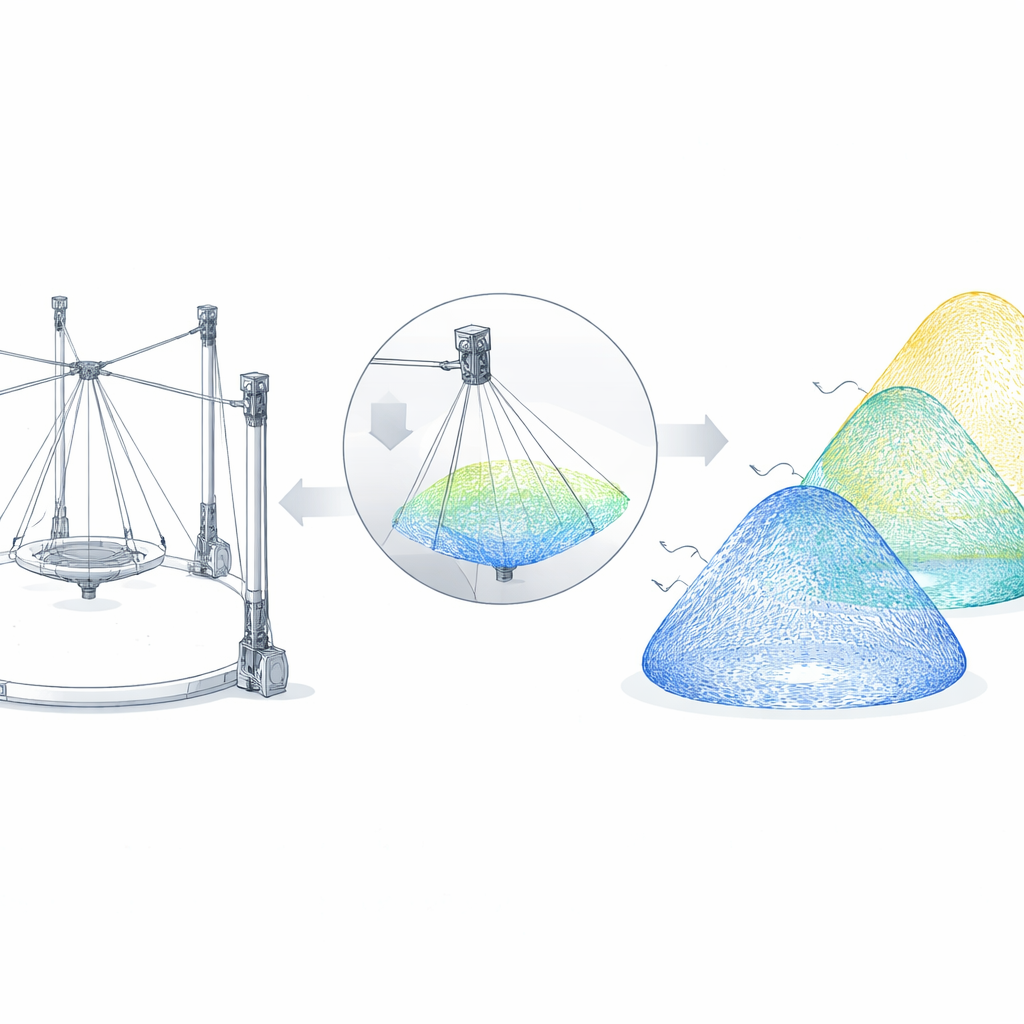
W centrum badania znajduje się modułowy równoległy robot zawieszony na linach (MCSPR). Zamiast stałych metalowych ramion używa on do sześciu identycznych „gałęzi”, z których każda jest wieżą z silnikami, bloczkami i liną łączącą się z centralną poruszającą się platformą, nazywaną efektorem końcowym. Te gałęzie rozmieszczone są wokół okrągłej prowadnicy i mogą być dodawane, usuwane, obracane oraz podnoszone i opuszczane. Przez ich przestawianie to samo wyposażenie może zachowywać się jak kilka różnych robotów: z dwiema gałęziami porusza się w płaszczyźnie, z trzema lub czterema porusza się swobodnie w przestrzeni, a z pięcioma lub sześcioma może dodatkowo pochylać i obracać platformę w wielu kierunkach.

Planowanie szkieletu maszyny zmieniającej kształt
Zaplanowanie tak elastycznego systemu to nie tylko kwestia przykręcenia części. Autorzy korzystają z systematycznego podejścia „syntezy strukturalnej”, traktując każdą linę, bloczek i przegub jako podstawowy element sieci. Za pomocą diagramów przypominających grafy odwzorowują, jak te elementy się łączą, aby platforma miała pożądane stopnie swobody ruchu — na przykład przesuwanie wzdłuż trzech osi lub obracanie wokół nich. Ten katalog modułów i połączeń służy jako zestaw narzędzi projektowych: w zależności od wymaganego ruchu projektant może wybrać liczbę gałęzi i ich rozmieszczenie na okrągłej prowadnicy, mając pewność, że otrzymana struktura będzie działać zgodnie z założeniami.
Wiedza, w którym kierunku platforma będzie się poruszać
Ponieważ platforma wisi na linach, które mogą tylko ciągnąć, a nie pchać, przewidywanie jej ruchu jest bardziej złożone niż w tradycyjnych robotach. Zespół opracowuje zunifikowany opis matematyczny, który działa dla wszystkich pięciu głównych konfiguracji MCSPR. Dla zadanej pozycji i orientacji platformy obliczają dokładnie, jak długie muszą być poszczególne liny i jak szybko powinny zmieniać długość. Następnie budują fizyczny prototyp i wydają polecenie platformie, aby narysowała gładką spiralną trajektorię w przestrzeni. Czujniki na linach rejestrują rzeczywiste ruchy, które są bardzo zbliżone do przewidywanych. Potwierdza to, że model może niezawodnie sterować robotem nawet w trakcie rekonfiguracji jego geometrii.
Określanie miejsc, gdzie robot może bezpiecznie pozostać w spoczynku
Równie ważne jest zrozumienie, w których miejscach zawieszona platforma może utrzymać równowagę. Jeśli którakolwiek lina straci naprężenie, kontrola zostaje utracona. Autorzy koncentrują się na tym, co nazywają statyczną przestrzenią równowagi: obszarze przestrzeni, w którym wszystkie liny mogą zachować dodatnie naprężenie przy działaniu jedynie siły grawitacji na platformę. Przy użyciu podejścia Monte Carlo losowo próbkują wiele możliwych pozycji i orientacji platformy i sprawdzają dla każdej, czy naprężenia lin potrzebne do utrzymania tej pozy są wszystkie w bezpiecznych granicach. Przyjęte próbki tworzą trójwymiarową chmurę, która wyznacza objętość roboczą dostępną robotowi.
Poszerzanie zasięgu robota poprzez inteligentne dostrojenie
Ponieważ gałęzie MCSPR mogą zmieniać wysokość i kąt, a platforma może przenosić ładunki o różnej masie i kątach przechylenia, rozmiar i kształt tej bezpiecznej objętości nie są stałe. Badacze systematycznie zmieniają te czynniki w konfiguracji z sześcioma gałęziami. Pokazują, że cięższy ładunek znacząco zmniejsza obszar, w którym robot może pozostać w równowadze, podczas gdy staranne dobranie wysokości gałęzi i ich rozmieszczenia kątowego może go powiększyć. Następnie stawiają problem optymalizacyjny: dostosować ładunek, wysokości gałęzi, kąty gałęzi i zakres pochylenia platformy tak, aby zmaksymalizować objętość bezpiecznej przestrzeni roboczej. Uruchamiając tę procedurę w oprogramowaniu, znajdują konfigurację, w której osiągalna, zbalansowana przestrzeń jest kilkukrotnie większa niż w prostym, domyślnym układzie.
Dlaczego to ma znaczenie dla zadań w świecie rzeczywistym
Dla osoby niebędącej specjalistą kluczowy wniosek jest taki, że tego typu robot można przekształcać niemal jak zestaw konstrukcyjny, a jednocześnie da się go analizować i optymalizować ze znaczną precyzją. Łącząc modułowy sprzęt z rygorystycznym planowaniem matematycznym i poszukiwaniem wspomaganym komputerowo, autorzy przekształcają pojedynczą maszynę zawieszoną na linach w wszechstronną platformę, którą można dostosować do wielu zadań — od precyzyjnej produkcji po rehabilitację — jednocześnie maksymalizując jej przestrzeń operacyjną i bezpiecznie podtrzymując ładunki.
Cytowanie: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Słowa kluczowe: roboty linowe, robotyka modularna, mechanizmy rekonfigurowalne, przestrzeń robocza robota, manipulatory równoległe