Clear Sky Science · pl
Rozpoznawanie i ekstrakcja parametrów kotew/przewodów stropowych z chmur punktów 3D za pomocą skanowania mobilnego (MLS)
Utrzymanie bezpieczeństwa wyrobisk kopalnianych
Głębokie podziemne kopalnie węgla polegają na metalowych kotwach i kablach wierconych w strop tunelu, aby zapobiec osuwaniu się skał. Jeśli te elementy nośne są źle umieszczone lub zaczynają zawodzić, zagrożone jest życie pracowników. Dziś sprawdzanie tysięcy kotew wciąż odbywa się w dużej mierze ręcznie, za pomocą taśm i mierników, w ciemnych, zapylonych chodnikach. Badanie przedstawia zautomatyzowaną metodę „widzenia” i pomiaru tych ukrytych lifeline’ów przy użyciu mobilnych skanerów laserowych i danych 3D, obiecując szybsze i bardziej obiektywne kontrole bezpieczeństwa we współczesnych kopalniach.
Skanowanie tunelu w trzech wymiarach
Naukowcy zbudowali przenośny system mobilnego skanowania laserowego zaprojektowany specjalnie do wyrobisk podziemnych. Wyposażony w dalmierz laserowy i czujniki ruchu, urządzenie jest noszone lub pchane przez tunel, szybko emitując impulsy laserowe w kierunku otaczającej skały. W miarę przemieszczania się technika nawigacyjna zwana SLAM (Simultaneous Localization and Mapping) skleja napływające pomiary w ciągły model 3D tunelu. Nawet bez sygnałów GPS, które nie docierają pod ziemię, system potrafi odtworzyć kształt odcinka drogi o długości 50 metrów z dokładnością rzędu centymetrów, rejestrując nie tylko powierzchnie skalne, ale też elementy wsporcze, takie jak kotwy, kable i stalowe płyty.
Czyszczenie cyfrowego tunelu
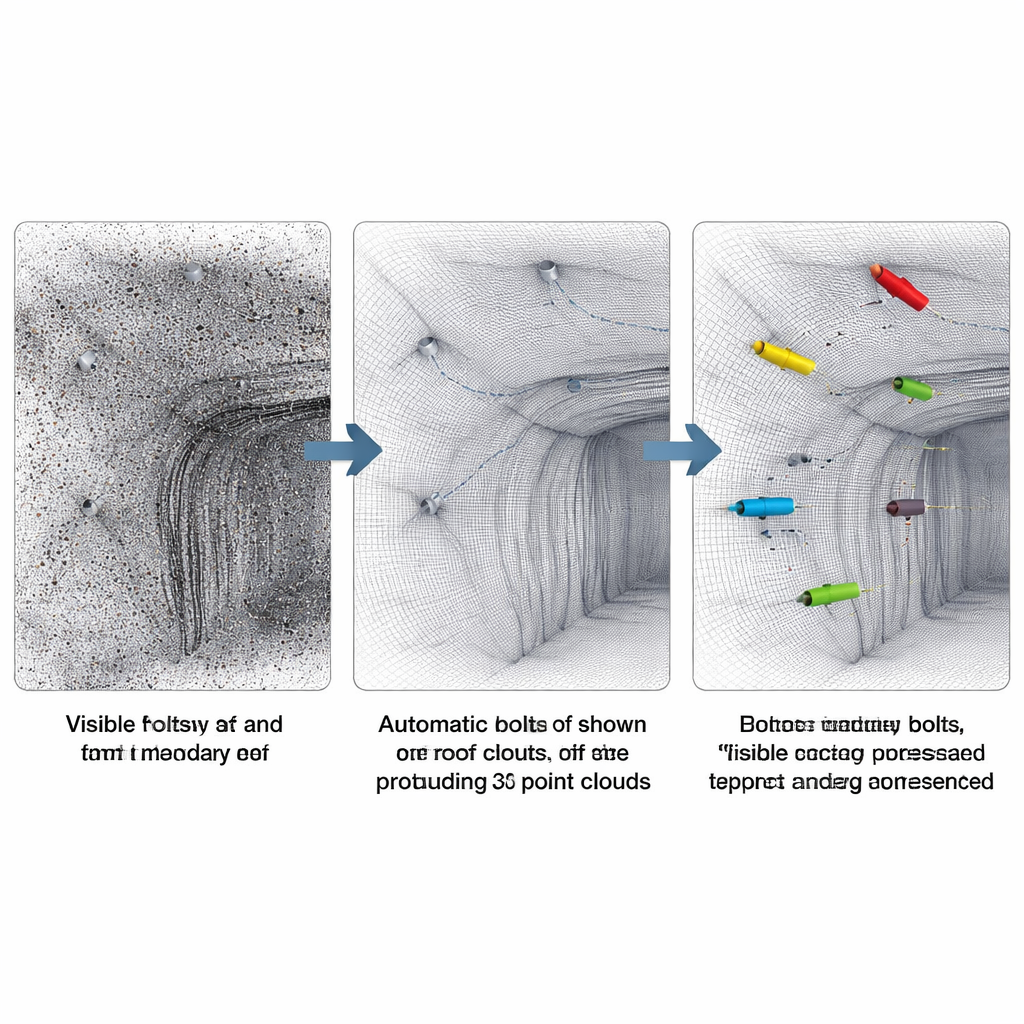
Surowe skany 3D z kopalni są chaotyczne. Kurz, mgiełka wodna, pracownicy i maszyny generują rozproszone punkty, które zaśmiecają dane. Zespół najpierw stosuje dwuetapowy proces odszumiania, który usuwa oczywiste odstające punkty, jednocześnie odzyskując prawdziwe powierzchnie, które mogły zostać błędnie odrzucone. Następnie izolują sam strop tunelu, ponieważ to tam są mocowane kotwy i kable. Poprzez matematyczne obrócenie danych wyrównują strop tak, by leżał płasko w standardowej orientacji, co ułatwia rozumienie „góry” i „dołu” oraz spójne mierzenie kierunku i długości każdego elementu nośnego w całej scenie.
Pozwolenie wirtualnej tkaninie na odnalezienie kotew
Aby oddzielić powierzchnię stropu od zamontowanego na niej osprzętu, badacze używają sprytnego zabiegu znanego jako filtr symulacji tkaniny (Cloth Simulation Filter). Wyobrażają sobie elastyczny arkusz tkaniny powoli opadający pod wpływem grawitacji na odwrócony cyfrowy strop. Tam, gdzie jest prawdziwa skała, tkanina przylega do powierzchni. Tam, gdzie wystaje kotwa, kabel lub płyta, tkanina układa się nad nimi, pozostawiając szczelinę. Mierząc niewielką różnicę wysokości między tkaniną a rzeczywistymi punktami, algorytm oznacza, które punkty należą do gładkiego stropu skalnego, a które prawdopodobnie są wypukłymi obiektami. Starannie dobrane ustawienia zapewniają, że tkanina jest wystarczająco szczegółowa, by odwzorować naturalne nierówności stropu, ale nie tak drobiazgowa, by przypadkowo „połknąć” kotwy, które ma ujawnić.
Nauka komputera liczenia i mierzenia podpór
Po odizolowaniu potencjalnych wypukłości metoda musi jeszcze zdecydować, które zgrupowania punktów to rzeczywiste kotwy lub kable, a które to rury, wiszące przewody lub szum. Tutaj technika grupowania oparta na gęstości łączy pobliskie punkty tworzące wydłużone kształty. Algorytm dopasowuje promień wyszukiwania i minimalny rozmiar klastra tak, aby każdy gwint kotwy zazwyczaj tworzył jedną czystą grupę, bez łączenia sąsiednich elementów. Dla każdej grupy prosta analiza geometryczna wyznacza główną oś obiektu i projektuje na nią wszystkie punkty, dając oszacowanie wystającej długości i kąta nachylenia. Dodatkowe reguły oparte na znanym projekcie kopalni — takie jak typowe rozstawy, spodziewana średnica i dopuszczalny kąt montażu — pomagają odfiltrować impostorów i pozostawić tylko prawdziwe, prawidłowo zamontowane podpory.
Z map 3D do praktycznych wniosków o bezpieczeństwie
Metodę przetestowano w głębokiej kopalni węgla w Mongolii Wewnętrznej, na pięciu kolejnych odcinkach stropu zawierających 127 kotew i kabli, które zostały dokładnie oznaczone ręcznie. Zautomatyzowany system poprawnie wykrył 118 z nich, z zaledwie kilkoma pominięciami i fałszywymi alarmami, nawet w trudnych warunkach z pyłem, częściowym pokryciem natryskowym (shotcrete) i zakłócającymi metalowymi elementami. Równie ważne jest to, że system wygenerował ustrukturyzowaną bazę danych dla każdej podpory: jej dokładną lokalizację, rozstaw, długość wystającą ze stropu oraz kąt względem skały. Dla inżynierów kopalni przekształca to złożoną chmurę punktów 3D w gotową listę kontrolną do kontroli jakości i długoterminowego monitoringu stanu. Choć podejście nadal zależy od uzyskania dobrych danych skanowania i widoczności przynajmniej części każdej kotwy, wskazuje na przyszłość, w której rutynowe kontrole bezpieczeństwa tuneli będą szybsze, częstsze i mniej zależne od subiektywnej oceny człowieka.
Cytowanie: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Słowa kluczowe: mobilne skanowanie laserowe, chmury punktów 3D, inspekcja kotew skalnych, bezpieczeństwo w górnictwie podziemnym, monitoring podpór tunelowych