Clear Sky Science · pl
Dynamiczne planowanie tras z uwzględnieniem jakości dla sześciostopniowych ramion robotycznych z użyciem BiRRT i metaheurystycznej optymalizacji opartych na ścieżkach B-sklejanych
Roboty, które poruszają się płynnie i bezpiecznie
Przemysłowe roboty współdzielą teraz zatłoczone przestrzenie pracy z ludźmi, narzędziami i taśmociągami. W takich ciasnych warunkach ramię robota nie może po prostu przemieścić się z punktu A do punktu B; musi to zrobić bez kolizji, przy niskim zużyciu energii i bez wstrząsów grożących uszkodzeniem go samego lub pobliskiego sprzętu. W artykule opisano praktyczną metodę planowania takich ostrożnych ruchów dla typowego sześciostawowego ramienia przemysłowego, zamieniając szorstkie, komputerowo znalezione trasy w gładkie, świadome energetycznie ruchy możliwe do wykonania na rzeczywistym sprzęcie fabrycznym.
Dlaczego zaplanowanie prostego sięgnięcia jest zaskakująco trudne
Gdy ramię robota się porusza, trzeba jednocześnie uwzględnić wiele czynników. Trasa powinna być krótka, aby zadania wykonywać szybko; zużycie energii powinno być umiarkowane, by ograniczyć nagrzewanie i zużycie; a ruch powinien być na tyle łagodny, by ramię nie szarpało ani nie wprowadzało wibracji. Klasyczne podejścia rysują gładkie krzywe matematyczne (np. spline’y) przez kilka ręcznie wybranych punktów pośrednich, co dobrze sprawdza się w otwartej przestrzeni, ale w zagraconych komórkach może stać się nieefektywne lub nawet niebezpieczne. Nowsze metody próbkujące, takie jak Rapidly Exploring Random Trees (RRT), dobrze radzą sobie z prowadzeniem przez złożone pola przeszkód, lecz mają tendencję do generowania tras z ostrymi zagięciami, które obciążają silniki i przekładnie. Autorzy argumentują, że żadna z tych rodzin metod nie wystarcza sama w sobie; zamiast tego łączą je w dwustopniowe ramy działania.
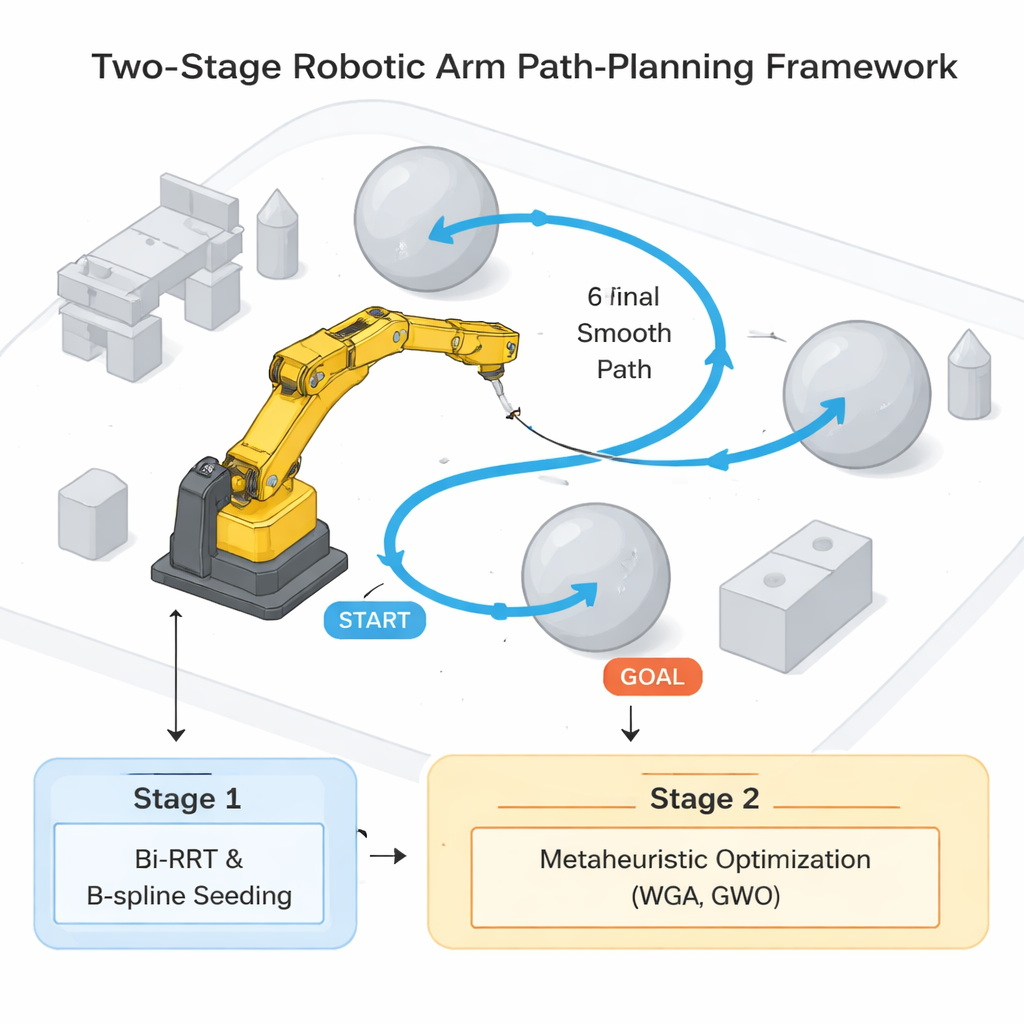
Dwustopniowa mapa drogowa dla ruchu robota
W pierwszym etapie zespół buduje bezpieczną „trasę referencyjną” w przestrzeni stawów robota, a nie tylko w przestrzeni pozycji chwytaka. Zaczynają od gładkiej krzywej B-sklejanej łączącej pozycję startową i docelową, omijającej sferyczne przeszkody z marginesem bezpieczeństwa. Ta krzywa następnie prowadzi dwukierunkowy planner RRT (Bi-RRT), który rozwija dwa losowe drzewa — od startu i od celu — aż się połączą w trasę wolną od kolizji. Po drodze każdy próbny ruch całego ramienia jest sprawdzany względem uproszczonych kształtów przeszkód. Gdy trasa zostanie znaleziona, zbędne zagięcia są skracane przez „short-cutting”, a wynik ponownie wyrażany jest jako spline parametryzowany w czasie, który robot mógłby w zasadzie podążać.
Nauka bardziej łagodnego ruchu robota
Drugi etap bierze tę wykonalną, lecz niedoskonałą trasę i dopracowuje ją pod kątem jakości. Autorzy stosują tutaj dwa zainspirowane naturą algorytmy optymalizacyjne: hybrydowy algorytm Wieloryb–Genetyczny (WGA) oraz Optymalizator Szarego Wilka (GWO). Oba działają na ograniczonym zestawie punktów kontrolnych i parametrach czasowych wzdłuż pierwotnego spline’a, ale mogą przesuwać te punkty wyłącznie w ramach uprzednio obliczonych bezpiecznych korytarzy wokół trasy. Każdy kandydacki ruch oceniany jest jedną złożoną miarą łączącą trzy składniki: jak daleko porusza się chwytak robota, ile energii zużywa na poziomie stawów (na podstawie charakterystyk poszczególnych silników) oraz jak „szarpane” są stawy — jak szybko zmieniają się ich przyspieszenia w czasie. Poprzez wielokrotne proponowanie, testowanie i ulepszanie kandydatów, optymalizatory te poszukują ruchów, które pozostają wolne od kolizji, ale są znacznie gładsze i bardziej gotowe do wykonania.
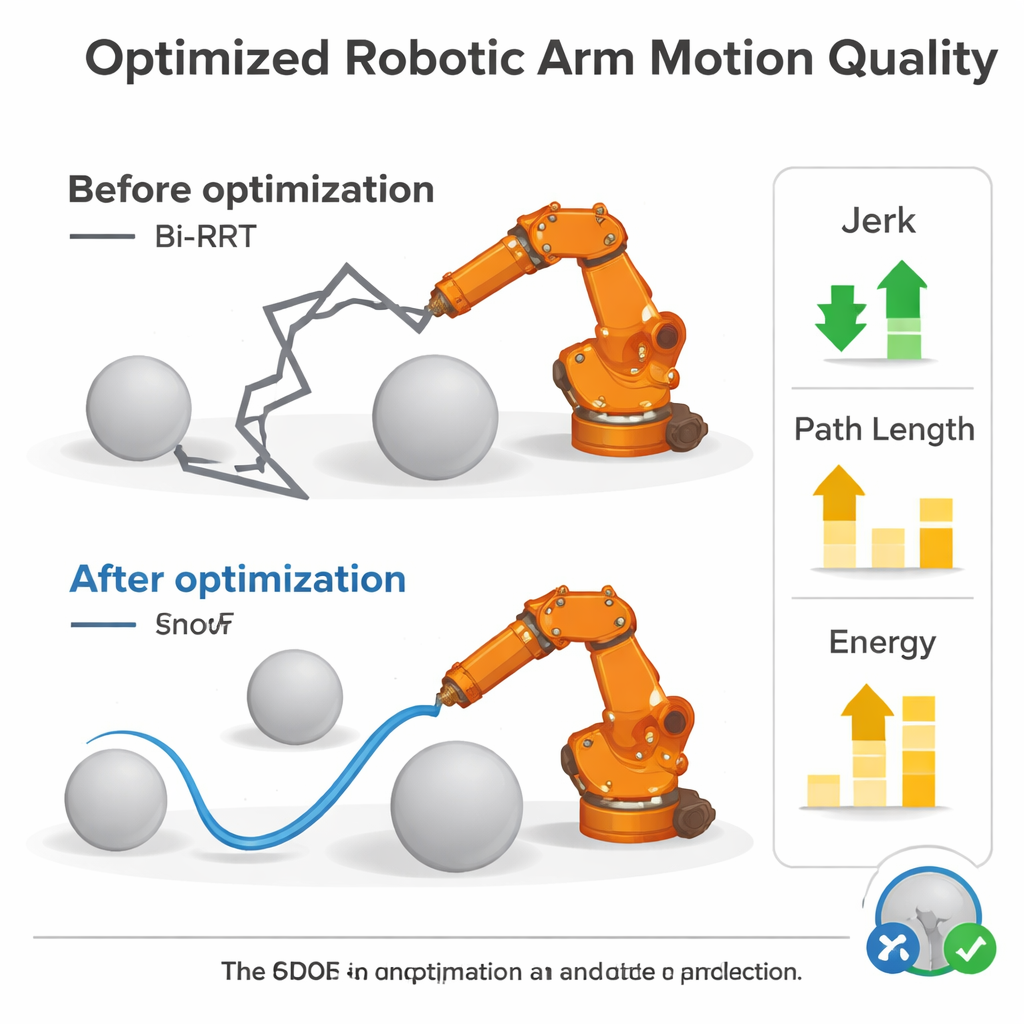
Co ujawniają symulacje
Autorzy testują swój proces na cyfrowym modelu powszechnie stosowanego ramienia przemysłowego KUKA KR 4 R600, poruszającego się przez scenę z trzema przeszkodami w stałym dwusekundowym ruchu. Czyste rozwiązanie oparte na spline’ach jest już stosunkowo płynne, ale nie wykorzystuje systematycznie wszystkich możliwych bezpiecznych ścieżek. Bi-RRT ze skracaniem znajduje trasę o podobnej długości geometrycznej i nawet o niższym zużyciu energii, lecz ma poważną wadę: jego wskaźnik jerk — miara gwałtowności zmian przyspieszenia stawów — jest około dziesięć razy wyższy, co sygnalizuje ruch prawdopodobnie powodujący wibracje i obciążenie rzeczywistej maszyny. Po zastosowaniu WGA lub GWO wartość jerk spada o około 94–96 procent względem surowej ścieżki Bi-RRT. To dramatyczne wygładzenie wiąże się jedynie z umiarkowanym wzrostem dystansu podróży (około 15–17 procent) i energii (około dwukrotnie), kompromisem, który autorzy uznają za wart zachodu dla rzeczywistego sprzętu.
Od teorii do hali produkcyjnej
Dla osoby niespecjalizującej kluczowy wniosek jest taki, że autorzy dostarczają konkretny przepis — oraz narzędzia oparte na MATLABie — pozwalające przekształcić pierwszą, surową koncepcję ruchu robota w dopracowany, przyjazny dla sprzętu manewr. Ich podejście najpierw gwarantuje istnienie trasy przez zagracone środowisko, a następnie przekształca tę trasę tak, by ramię poruszało się z mniejszą liczbą szarpnięć, przy zachowaniu wszystkich ograniczeń stawów i zachowalności odległości. Efektem końcowym jest zestaw ruchów, które rzeczywisty robot przemysłowy może wykonać bezpieczniej i niezawodniej, tworząc podwaliny pod przyszłe rozszerzenia, w których roboty współdzielą przestrzenie pracy z ludźmi i dostosowują swoje ruchy w czasie rzeczywistym przy użyciu kamer, a nawet interfejsów mózg–komputer.
Cytowanie: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Słowa kluczowe: planowanie trajektorii robota, przemysłowe ramię robota, unikanie kolizji, płynność ruchu, optymalizacja metaheurystyczna