Clear Sky Science · pl
Bezpieczne skalowanie formacji i planowanie ruchu dla heterogenicznych zespołów UAV–UGV w zatłoczonych środowiskach
Roboty współpracujące w powietrzu i na ziemi
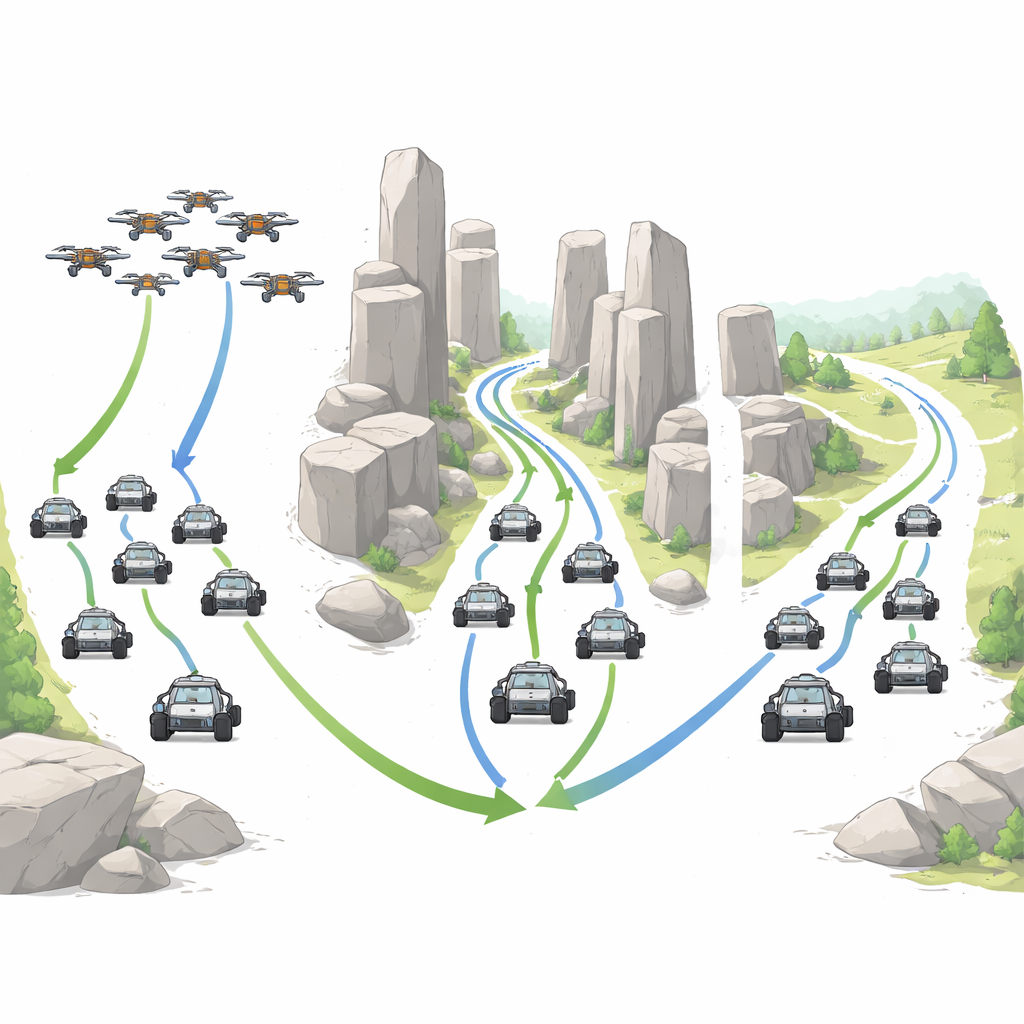
Wyobraź sobie rój małych latających dronów rozpoznających teren nad strefą klęski żywiołowej, podczas gdy wytrzymałe pojazdy terenowe przedzierają się przez gruz poniżej — wszystkie poruszają się jako jeden skoordynowany zespół. Artykuł bada, jak utrzymać takie mieszane grupy robotów razem w ciasnych, pełnych przeszkód przestrzeniach, bez kolizji i konieczności gwałtownych przeliczeń planów. Autorzy proponują nowe podejście, dzięki któremu roboty powietrzne i lądowe dzielą stabilną formację, przeciskają się przez wąskie szczeliny i nadal szybko oraz bezpiecznie docierają do celu.
Dlaczego koordynacja mieszanych zespołów robotów jest trudna
Latające drony i kołowe pojazdy lądowe zachowują się bardzo odmiennie. Drony przemieszczają się w trzech wymiarach i łatwo zbaczają z kursu pod wpływem wiatru. Pojazdy lądowe muszą respektować ograniczenia skrętu i radzić sobie z trudnym terenem. A przecież wiele rzeczywistych zadań — od poszukiwań i ratownictwa po inspekcje infrastruktury — skorzystałoby, gdyby te roboty potrafiły poruszać się razem jako jedna, trójwymiarowa jednostka. Istniejące metody często traktują utrzymanie formacji i unikanie przeszkód jako oddzielne problemy. Gdy środowisko staje się zatłoczone, formacje mają tendencję do rozpadu i późniejszego ponownego scalania, co marnuje czas i zwiększa ryzyko kolizji.
Nowy sposób na utrzymanie grupy razem
Aby rozwiązać ten problem, autorzy zaprojektowali ramy, które nazwali RG–ASAPF, ściśle łączące kształtowanie formacji z jej ruchem. U podstaw leży matematyczny opis formacji jako struktury „sztywnej”: pożądane odległości między robotami są dobrane tak, by ogólny kształt był jednoznacznie określony, jak pręty stabilnego, trójwymiarowego rusztowania. Każdy robot stosuje wspólną regułę korygującą ruch, tak aby te odległości były odtwarzane i utrzymywane, nawet gdy formacja się przemieszcza i obraca. Reguła ta została zaprojektowana tak, by działać zarówno dla robotów latających, jak i jeżdżących, i dostosowuje się online do niepewności, takich jak niemodelowane tarcie czy niewielkie zewnętrzne pchnięcia.
Pozwalanie formacji „oddychać” w ciasnych przestrzeniach
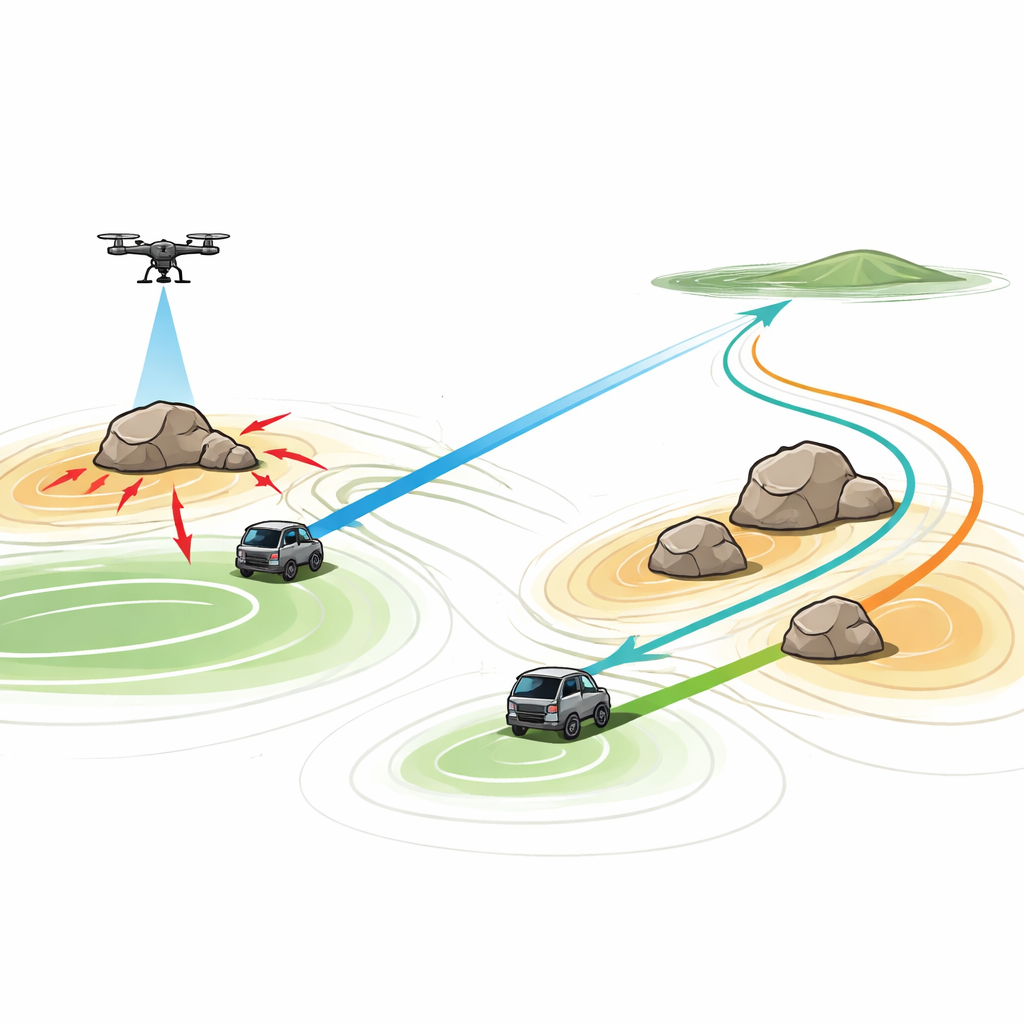
Prawdziwe środowiska rzadko są otwartymi polami; pełne są budynków, drzew, pojazdów i poruszających się obiektów. Formacja bezpieczna na otwartej przestrzeni może być zbyt duża, by przejść przez wąską uliczkę lub gęsty skupisko przeszkód. Proponowana metoda pozwala formacji płynnie skalować się — kurczyć lub rozszerzać ogólny rozmiar — przy zachowaniu jej podstawowej struktury. Zespół wprowadza pojazd lądowy jako lidera, który planuje trasę wykorzystując sztuczne pole potencjału, gdzie cel działa jak przyciągacz, a przeszkody odpychają formację. W przeciwieństwie do tradycyjnych pól potencjału, które mogą utknąć w martwych punktach lub powodować nerwowe ruchy, ich „adaptacyjna bezpieczna” wersja ciągle dostraja siłę odpychania przeszkód tak, by utrzymać bezpieczny dystans bez nadmiernej ostrożności czy utknięcia.
Inteligentniejsze trasy przez zator i ruch
Pole potencjału zostało dodatkowo udoskonalone tak, by ogólny „krajobraz” przyciągania i odpychania zawsze miał swoje najniższe położenie w miejscu celu. Pomaga to zapobiegać utknięciu formacji w niewygodnych miejscach między przeszkodami. Siła efektu odpychającego jest regulowana w locie za pomocą prostej reguły uczenia zapożyczonej z wczesnych metod trenowania sieci neuronowych. Gdy roboty zbliżają się zbyt blisko przeszkód, odpychanie automatycznie rośnie; gdy mają wystarczający prześwit, rozluźnia się. Jeśli środowisko staje się tak ciasne, że nawet pomniejszona formacja nie może bezpiecznie przejść, metoda uruchamia plan awaryjny: zespół chwilowo zatrzymuje się, rozszerza umowny korytarz bezpieczeństwa i ponownie planuje bezpieczniejszą trasę wokół problematycznego obszaru, zanim wznowi ruch.
Testy w wirtualnych światach
Aby ocenić skuteczność metody, autorzy przeprowadzili obszerne symulacje komputerowe z mieszanymi zespołami dronów i pojazdów lądowych. Testowali otwarte obszary z kilkoma przeszkodami, gęste labirynty z wieloma barierami, sceny z poruszającymi się przeszkodami oraz formacje, które musiały zmieniać się w bardziej złożone kształty 3D, takie jak pryzmat sześciokątny. We wszystkich tych przypadkach formacja utrzymywała spójność w trzech wymiarach, bezpiecznie omijała przeszkody statyczne i ruchome oraz dostosowywała rozmiar, gdy było to potrzebne. Roboty podążały gładkimi, efektywnymi ścieżkami, zamiast zygzakować wokół barier. W porównaniu z kilkoma popularnymi metodami planowania — w tym klasycznymi i ulepszonymi polami potencjału, optymalizacją roju cząstek oraz liniową i nieliniową predykcyjną kontrolą modelu — nowe podejście znajduje trasy zwykle krótsze, płynniejsze i mniej energochłonne, a jednocześnie oblicza je szybciej niż ciężkie metody oparte na optymalizacji.
Co to oznacza dla misji w świecie rzeczywistym
Dla nietechnika kluczowym przekazem jest to, że artykuł pokazuje, jak sprawić, by mieszane zespoły robotów latających i jeżdżących poruszały się jak jedno, elastyczne ciało przez zatłoczone przestrzenie 3D. Zamiast rozpraszać formację przy pojawieniu się przeszkód, grupa może się zginać, kurczyć i przestawiać, pozostając spójna i bezpieczna. Może to przełożyć się na szybsze i bardziej niezawodne wsparcie robotów podczas klęsk żywiołowych, inspekcji przemysłowych i patroli bezpieczeństwa. Choć obecna praca została zademonstrowana w symulacjach i opiera się na wyznaczonym pojeździe-liderze, autorzy opisują dalsze kroki w kierunku bardziej odpornego na awarie zespołu i eksperymentów w rzeczywistym świecie, przybliżając wizję ściśle skoordynowanych rojów robotów powietrzno‑lądowych do praktyki.
Cytowanie: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Słowa kluczowe: formacja wielorobotowa, współpraca UAV UGV, unikanie przeszkód, planowanie ruchu, robotyka rojowa