Clear Sky Science · pl
Egzoszkielet do teleoperacji kończyny górnej z płynną parametryzacją długości ramienia i adaptacyjnym łączonym impedancyjnie sterowaniem wyzwalanym siłą
Bezpieczniejsza praca bez bezpośredniego ryzyka
Wiele z najniebezpieczniejszych zawodów na Ziemi — i w kosmosie — wciąż wymaga ludzkiego osądu i zręczności. Pomyśl o naprawie uszkodzonego obiektu jądrowego, obchodzeniu się z materiałami wybuchowymi czy stabilizowaniu statku kosmicznego. W tym badaniu przedstawiono nowy rodzaj napędzanego egzoszkieletu ramienia, który pozwala osobie sterować odległym ramieniem robota tak, jakby było jej własnym, pozostając przy tym z dala od zagrożenia. Urządzenie koncentruje się na tym, by ruchy robota i jego „odczucie” były naturalnym przedłużeniem ciała noszącego, nawet gdy dostosowuje się do różnych rozmiarów ramienia i zmieniających się sił w otoczeniu.
Dlaczego zdalne ramiona mają znaczenie
Roboty już pracują pod wodą, w strefach klęsk żywiołowych i we wnętrzach reaktorów, lecz większość z nich jest albo zaprogramowana z góry, albo kierowana prostymi joystickami. Ogranicza to ich możliwości przy nagłych zmianach warunków. Systemy teleoperacji — gdzie osoba steruje zdalnym robotem w czasie rzeczywistym — oferują środkową ścieżkę, łącząc ludzkie podejmowanie decyzji z siłą i zasięgiem robota. Wcześniejsze systemy potrafiły poruszać narzędziami, ale często brakowało im precyzyjnego sprzężenia zwrotnego sił i możliwości łatwego dopasowania do ciała różnych użytkowników. Skutkowało to niezgrabnymi ruchami, słabym „odczuciem” i dodatkowym obciążeniem zarówno operatora, jak i maszyny.
Nakładany robotyczny rękaw, który naprawdę pasuje
Zespół zbudował noszony egzoszkielet kończyny górnej z siedmioma napędzanymi stawami, które korespondują z barkiem, łokciem i nadgarstkiem. Lekkie materiały, takie jak włókno węglowe i aluminium, utrzymują urządzenie responsywnym, a nie ciężkim i ospałym. Istotną innowacją jest możliwość płynnej regulacji długości ramienia górnego i przedramienia egzoszkieletu, a nie tylko kilku stałych położeń. Szyny przesuwne z wbudowanymi czujnikami elektrycznymi ciągle mierzą rzeczywistą długość ramienia noszącego i podają te dane do cyfrowego modelu ciała. W efekcie urządzenie automatycznie dostosowuje swoją wewnętrzną geometrię do każdej osoby, poprawiając komfort i sprawiając, że ruchy robota wierniej oddają zamiary człowieka. 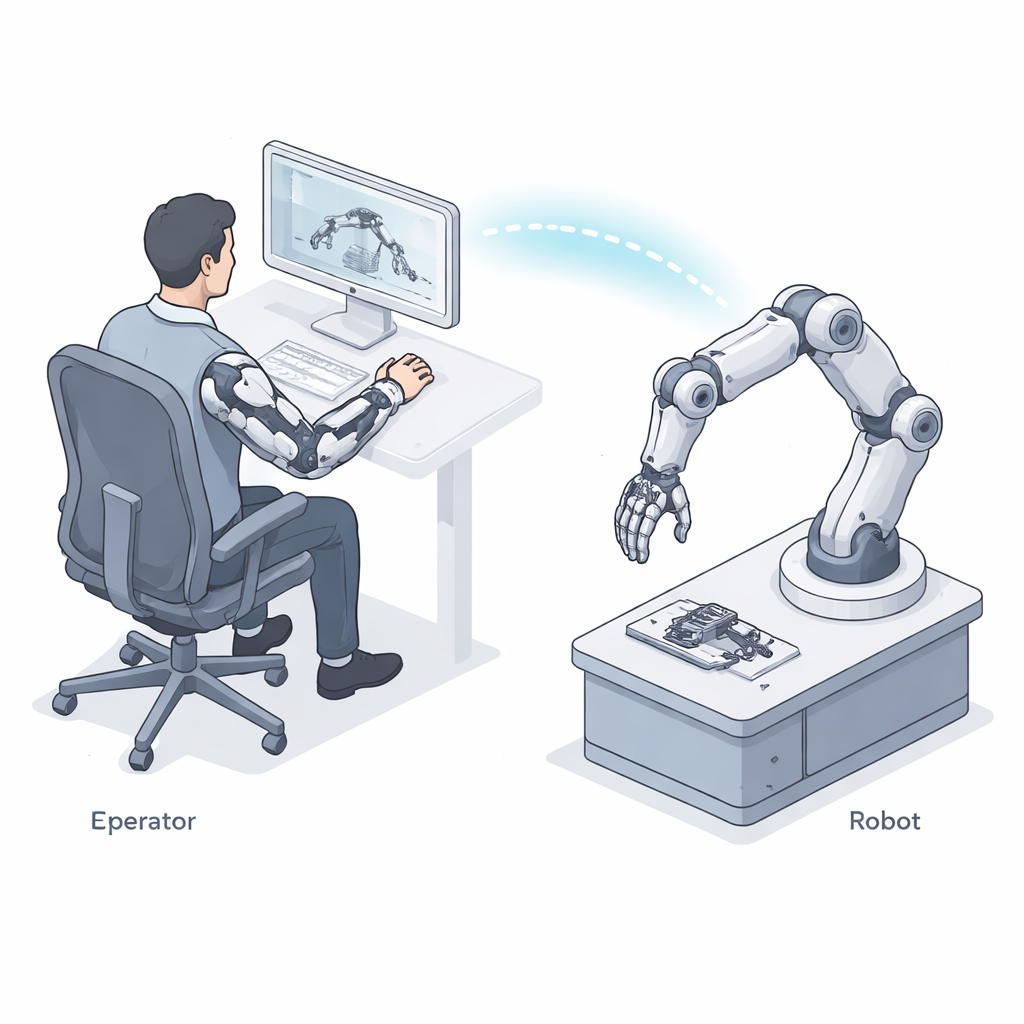
Ruch zgodny z ciałem, a nie przeciw niemu
Barki człowieka nie obracają się jedynie jak zawiasy; łopatka przesuwa się też po klatce piersiowej. Wiele egzoszkieletów to ignoruje i w efekcie walczy z naturalnym ruchem, powodując dyskomfort. Ten projekt dodaje pasywny moduł z kilkoma dodatkowymi stopniami swobody, który dyskretnie podąża za subtelnymi przesunięciami barku i tułowia, zmniejszając nacisk na skórę i stawy. Jednocześnie napędzane stawy są dostrojone tak, by ich moment obrotowy — siła skręcająca — pozostawał poniżej bezpiecznych granic dla ludzkich tkanek. Wyłączniki awaryjne i detektory zacięcia dopełniają funkcje bezpieczeństwa, pozwalając systemowi szybko zareagować, jeśli coś pójdzie nie tak.
Mądrzejsze odczuwanie kontaktu
Ponad aspekty mechaniczne, autorzy koncentrują się na tym, co odczuwa noszący. Gdy zdalny robot dotyka lub naciska coś — ścianę, uchwyt narzędzia czy inny obiekt — te siły są przekazywane z powrotem przez egzoszkielet, aby użytkownik wyczuł opór. System sterowania łączy dwa zwykle sprzeczne wymagania: dokładne śledzenie ruchów operatora i delikatne, podatne zachowanie przy rosnących siłach kontaktu. Przy niskich siłach system jest sztywny i precyzyjny, ściśle naśladując tor ruchu ramienia noszącego. Gdy siły przekraczają próg bezpieczeństwa, sterowanie automatycznie zmiękcza się, pozwalając na pewną uległość, tak by uderzenia były amortyzowane, a nie gwałtowne. Autorzy wykorzystują narzędzia matematyczne oparte na energii, aby wykazać, że to połączone zachowanie pozostaje stabilne, zamiast wpadać w oscylacje. 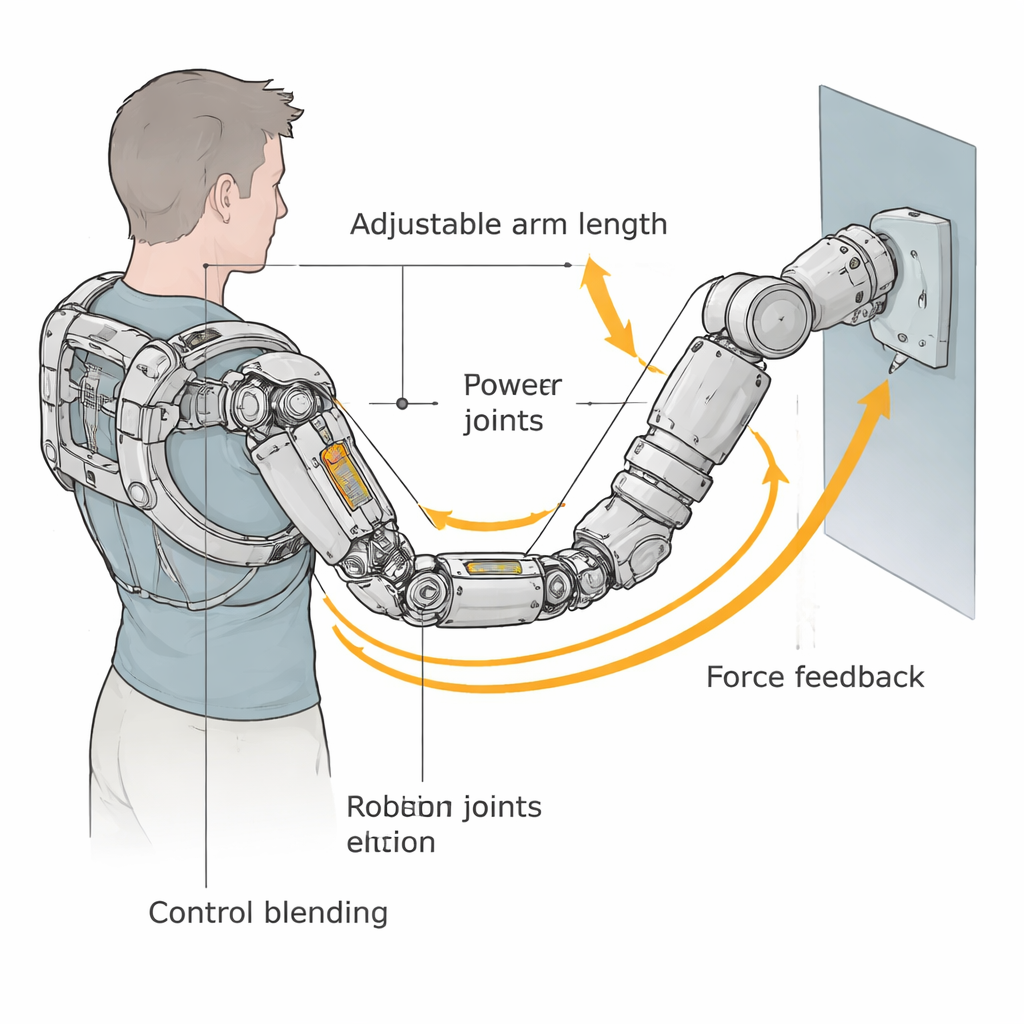
Próby systemu
Aby ocenić egzoszkielet, badacze podłączyli go do szeroko używanego przemysłowego ramienia robota. Gdy osoba nosząca egzoszkielet odwzorowywała w powietrzu tor ósemki, zdalny robot wiernie odtwarzał ruch, mimo niewielkich opóźnień komunikacyjnych. Dodatkowe testy sprawdzały, jak działa pomiar długości ramienia: odczyty napięcia z czujników przesuwu odpowiadały pomiarom fizycznym z błędami mniejszymi niż kilka milimetrów, nawet po wielokrotnym zakładaniu i zdejmowaniu. W kontrolowanych symulacjach, w których robot naciskał na wirtualną sztywną ścianę, pełny schemat sterowania zmniejszył szczytowe siły kontaktu o niemal 70 procent w porównaniu z podstawową konfiguracją, przy jednoczesnym zachowaniu dużej dokładności śledzenia w ruchu swobodnym.
Co to znaczy dla pracy i opieki w rzeczywistym świecie
Mówiąc prościej, to badanie przybliża nas do zdalnych robotów, które są tak naturalne i bezpieczne w obsłudze, jak poruszanie własnym ramieniem. Łącząc dopasowaną, przylegającą ramę o regulowanej budowie, precyzyjne śledzenie ruchu ludzkiego i inteligentne sprzężenie zwrotne sił, które adaptuje się w locie, system obiecuje precyzyjniejszą i mniej męczącą teleoperację w niebezpiecznych środowiskach. Ta sama technologia mogłaby też służyć pacjentom rekonwalescencji po udarze, pozwalając terapeutom kierować i rejestrować ruchy ramienia, podczas gdy pacjenci otrzymują realistyczną pomoc i informację zwrotną. W miarę jak przyszłe wersje będą integrować sygnały z mięśni i kierunku wzroku oraz uczyć się na podstawie doświadczeń, takie pary egzoszkielet–robot mogą stać się wszechstronnymi narzędziami zarówno dla ekstremalnych misji, jak i codziennej rehabilitacji.
Cytowanie: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Słowa kluczowe: egzoszkielet do teleoperacji, sterowanie ramieniem robota, sprzężenie zwrotne siłowe, robotyka rehabilitacyjna, prace zdalne w niebezpiecznych warunkach