Clear Sky Science · pl
Szacowanie stanu naładowania baterii w czasie rzeczywistym i autonomiczna strategia ładowania dla dynamicznego robota ładującego z filtrem Kalmana rozszerzonym
Dlaczego inteligentniejsze baterie robotów mają znaczenie
Od kurierów magazynowych po roboty inspekcyjne — mobilne roboty są użyteczne tyle, ile pozwalają ich baterie. Jeśli robot źle oceni, ile energii mu pozostało, może ugrzęznąć daleko od stacji ładującej, przerywając pracę i narażając baterię na uszkodzenie. W artykule przedstawiono nowy sposób, dzięki któremu roboty mogą w czasie rzeczywistym „znać” rzeczywisty poziom naładowania oraz decydować, kiedy i jak się doładować, by pracować dłużej, bezpieczniej i przy mniejszym nadzorze człowieka.

Roboty, intensywne zadania i obciążone baterie
W przeciwieństwie do samochodów elektrycznych płynnie jadących autostradą, wiele robotów mobilnych doświadcza gwałtownych startów, zatrzymań i częstych zmian obciążenia. Te szoki powodują szybkie wahania prądu i napięcia baterii, które mylą tradycyjne metody estymacji pozostałego ładunku. Proste techniki, które odczytują napięcie baterii lub liczą prąd w czasie, zakładają zwykle spokojne, stabilne warunki i nie uwzględniają starzenia ani nagrzewania ogniwa. W rezultacie ich oszacowania dryfują, błędy narastają, a robot może zbyt często się ładować lub nadmiernie eksploatować baterię, skracając jej żywotność.
Dokładniejszy model procesów wewnątrz baterii
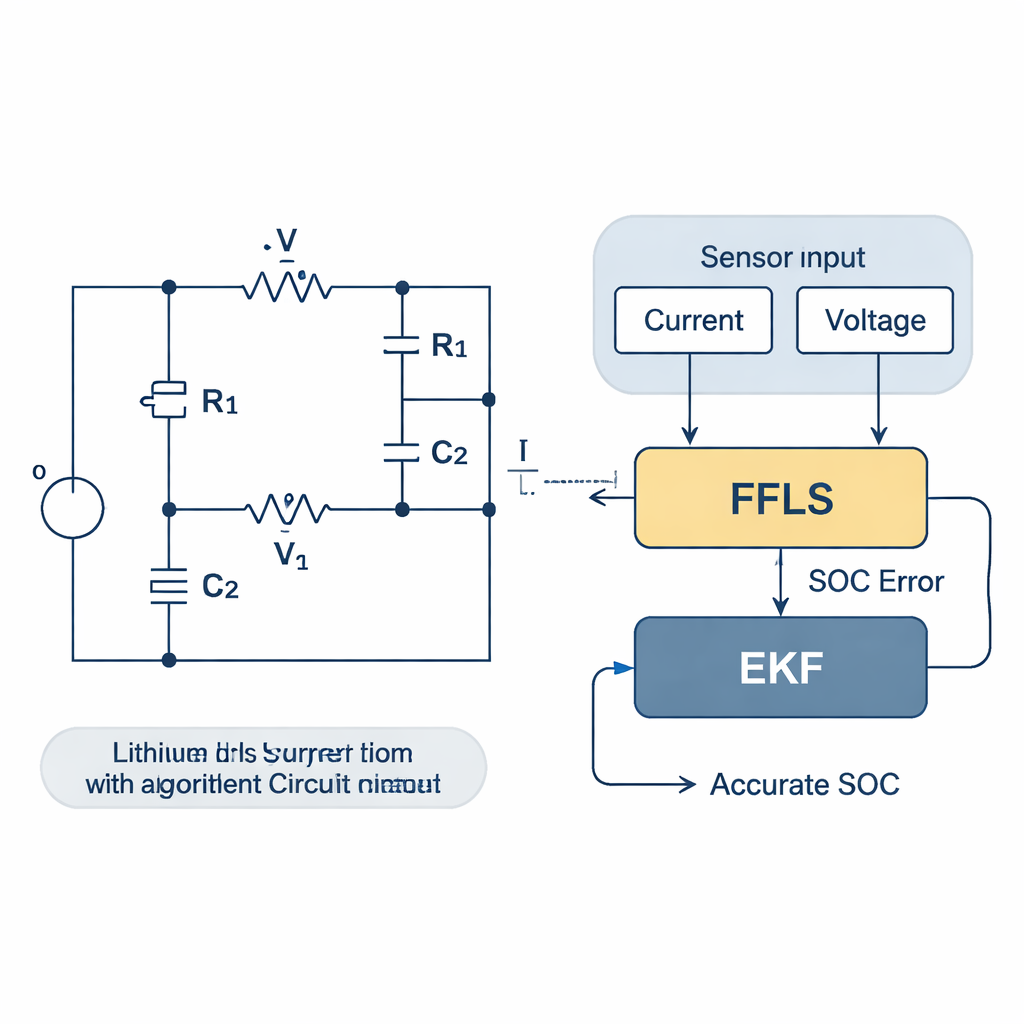
Autorzy rozwiązują ten problem, dając robotowi bardziej realistyczny obraz pakietu baterii litowo-żelazowo-fosforanowych. Zamiast traktować baterię jako czarną skrzynkę z jedną wartością napięcia, reprezentują ją jako sieć elektryczną z oporem wewnętrznym i dwiema gałęziami „polaryzacyjnymi”, które naśladują ruch i akumulację jonów wewnątrz ogniwa. Ten model RC drugiego rzędu odzwierciedla szybkie i wolne reakcje na zmiany obciążenia. Robot nieustannie mierzy prąd i napięcie i dopasowuje te sygnały do modelu za pomocą metody najmniejszych kwadratów z tzw. czynnikiem zapominania — matematycznym sposobem, by mocniej ważyć niedawne dane i wygaszać przestarzałą historię, gdy warunki się zmieniają.
Pozwalanie algorytmowi uczyć się i adaptować w locie
Nad tym modelem zespół stosuje rozszerzony filtr Kalmana, powszechnie używane narzędzie do śledzenia ukrytych stanów w zaszumionych danych. W tym wypadku ukrytym stanem jest prawdziwy stan naładowania baterii. W trakcie pracy robotu filtr przewiduje, jak ładunek powinien się zmieniać na podstawie modelu i mierzonego prądu, a następnie koryguje to przewidywanie wykorzystując zmierzone napięcie. Moduł najmniejszych kwadratów z czynnikiem zapominania ciągle aktualizuje kluczowe parametry modelu online, dzięki czemu filtr nie polega na przestarzałym, fabrycznym opisie baterii. Sprytnie, badacze wykorzystują też związek między oporem wewnętrznym a wielkością zwaną pojemnością polaryzacyjną: gdy rośnie temperatura, opór maleje, a pojemność rośnie. Obserwując te wielkości razem system może wywnioskować efekty temperaturowe bez fizycznego czujnika temperatury i odpowiednio dopasować model.
Nauczanie robotów, kiedy i jak doładowywać
Dokładne oszacowania ładunku to tylko połowa historii; druga to sposób ich wykorzystania przez robota. Autorzy opracowali autonomiczną strategię ładowania, która unika zarówno ciągłego „dolewania” energii, jak i głębokich rozładowań. Definiują górne i dolne limity naładowania: jeśli bateria spadnie poniżej progu, robot priorytetowo wraca do stacji dokującej; jeśli jest już blisko górnego limitu, odkłada ładowanie i kontynuuje pracę. W bezpiecznym zakresie robot doładowuje się podczas chwil bezczynności. System monitoruje też każde ogniwo w pakiecie i wyrównuje ich ładunek, by żadne nie było przeładowane, podczas gdy inne pozostają z tyłu — kluczowy krok w zapobieganiu przedwczesnemu starzeniu. Aby przyspieszyć dokowanie, robot łączy nawigację na poziomie pomieszczeń z krótkodystansowym prowadzeniem podczerwienią, skracając trasy i czas dokowania.
Dłużej działające, bardziej niezawodne zasilanie robotów
W testach na publicznych zbiorach danych o bateriach, w symulacjach i na rzeczywistych robotach nowa metoda oszacowała stan naładowania z dokładnością około 98%, wyraźnie przewyższając kilka zaawansowanych alternatyw opartych na filtrach cząsteczkowych, sieciach neuronowych i transformatorach. Baterie zarządzane tą metodą utrzymywały ładunek lepiej w tygodniach symulowanego użytkowania i przetrwały o 15–40% więcej cykli ładowania–rozładowania niż przy porównywalnych metodach. Opór wewnętrzny rósł wolniej, co wskazuje na zdrowsze ogniwa, a roboty spędzały mniej czasu w dokach przy jednoczesnym utrzymaniu lepszej kondycji baterii. Dla niewyszkolonego czytelnika główna konkluzja jest taka, że ta technika pozwala robotom lepiej „opiekować się” własnymi bateriami: potrafią precyzyjniej oceniać energię, wybierać mądrzejsze momenty na doładowanie i cicho wydłużać czas pracy drogich pakietów akumulatorowych bez dodatkowych czujników czy dużej mocy obliczeniowej.
Cytowanie: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Słowa kluczowe: roboty mobilne, stan naładowania baterii, autonomiczne ładowanie, rozszerzony filtr Kalmana, baterie litowo-żelazowo-fosforanowe