Clear Sky Science · pl
Dynamiczny łańcuch do harmonogramowania systemów wielu AGV z profilem ruchu uwzględniającym ładunek
Dlaczego roboty w magazynach potrzebują lepszego wyczucia czasu
Zakupy online zapełniły magazyny towarami, które trzeba przemieszczać szybko, bezpiecznie i przez całą dobę. Wiele obiektów polega dziś na flotach robotów podłogowych — Automatycznych Pojazdach Prowadzonych (AGV) — które kursują z regałami i paletami. Jeśli jednak roboty są harmonogramowane na podstawie uproszczonych założeń dotyczących ich ruchu, mogą tracić czas, potrząsać delikatnymi paczkami, a nawet stwarzać ryzyko kolizji. W artykule przedstawiono nowe podejście do planowania i koordynacji wielu AGV jednocześnie, uwzględniające ich rzeczywiste zachowanie fizyczne, obiecujące płynniejszy ruch i bezpieczniejszy ładunek w zatłoczonych magazynach.
Roboty, które przenoszą towary, a nie tylko liczby
Współczesne AGV już przemierzają magazyny, lotniska i fabryki, ciągnąc wózki lub podnosząc regały i palety. Większość istniejącego oprogramowania zarządzającego tymi flotami działa na wysokim poziomie: decyduje, który robot wykona zadanie i w przybliżeniu jaką trasą ma się poruszać. Aby uprościć obliczenia, zwykle zakłada się stały czas przejazdu między dwoma punktami, ignorując to, jak szybko robot może przyspieszać lub zwalniać oraz jaki ma ładunek. Autorzy pokazują, że to uproszczenie rodzi problemy w rzeczywistych budynkach. Roboty mogą przybywać na skrzyżowania wcześniej lub później niż oczekiwano, co zwiększa ryzyko zablokowania ruchu, niebezpiecznych mijanek lub nagłego hamowania, które powoduje kołysanie przewożonych przedmiotów.
Dodanie fizyki rzeczywistego świata do harmonogramu
Badacze rozwiązują tę lukę dwuetapowym podejściem łączącym fizykę z harmonogramowaniem. Najpierw opracowali estymator Dynamic Traveling Time dla AGV, nazwany DTT-AGV. Zamiast traktować korytarz jako jeden odcinek o stałym czasie, DTT-AGV dzieli każdy ruch na fazy: rozpędzanie, jazda z prędkością ustaloną i hamowanie. Wykorzystuje prosty model mechaniczny AGV niosącego regał, gdzie regał zachowuje się jak masa połączona sprężynami i tłumikami. Model ten oddaje, jak przyspieszanie i zwalnianie mogą powodować kołysanie lub drgania ładunku. Na tej podstawie algorytm oblicza, jak szybko pojazd może bezpiecznie się poruszać na danym odcinku i z danym ładunkiem, nie przekraczając limitów prędkości, sił czy drgań, i zwraca realistyczny czas przejazdu dla każdego segmentu trasy.
Zapobieganie spotkaniom nos w nos
Po drugie, zespół wprowadza metodę Łączenia Czasów Przybycia, ATC-AGV, która koordynuje wielu robotów na współdzielonych odcinkach. Gdy DTT-AGV oszacuje czas trwania każdego segmentu, ATC-AGV przypisuje dokładne czasy przybycia i odjazdu w każdym węźle — skrzyżowaniach, zakrętach czy punktach przekazania — wzdłuż trasy każdego robota. Buduje w każdym współdzielonym węźle „łańcuch” czasowy, zapewniając bezpieczną przerwę między pojazdami i uwzględniając bieżące stany robotów, takie jak załadunek, ładowanie czy wykonywanie skrętu. Jeśli nowy plan spowodowałby zbyt bliskie czasowo zajęcie tego samego węzła przez dwa AGV, ATC-AGV przesuwa harmonogram jednego z robotów tyle, ile potrzeba, by przywrócić margines bezpieczeństwa. W praktyce przekształca to siatkę magazynu w mapę świadomą czasu, która pomaga zapobiegać kolizjom zanim się pojawią.
Testowanie płynniejszego ruchu i łagodniejszych przejazdów
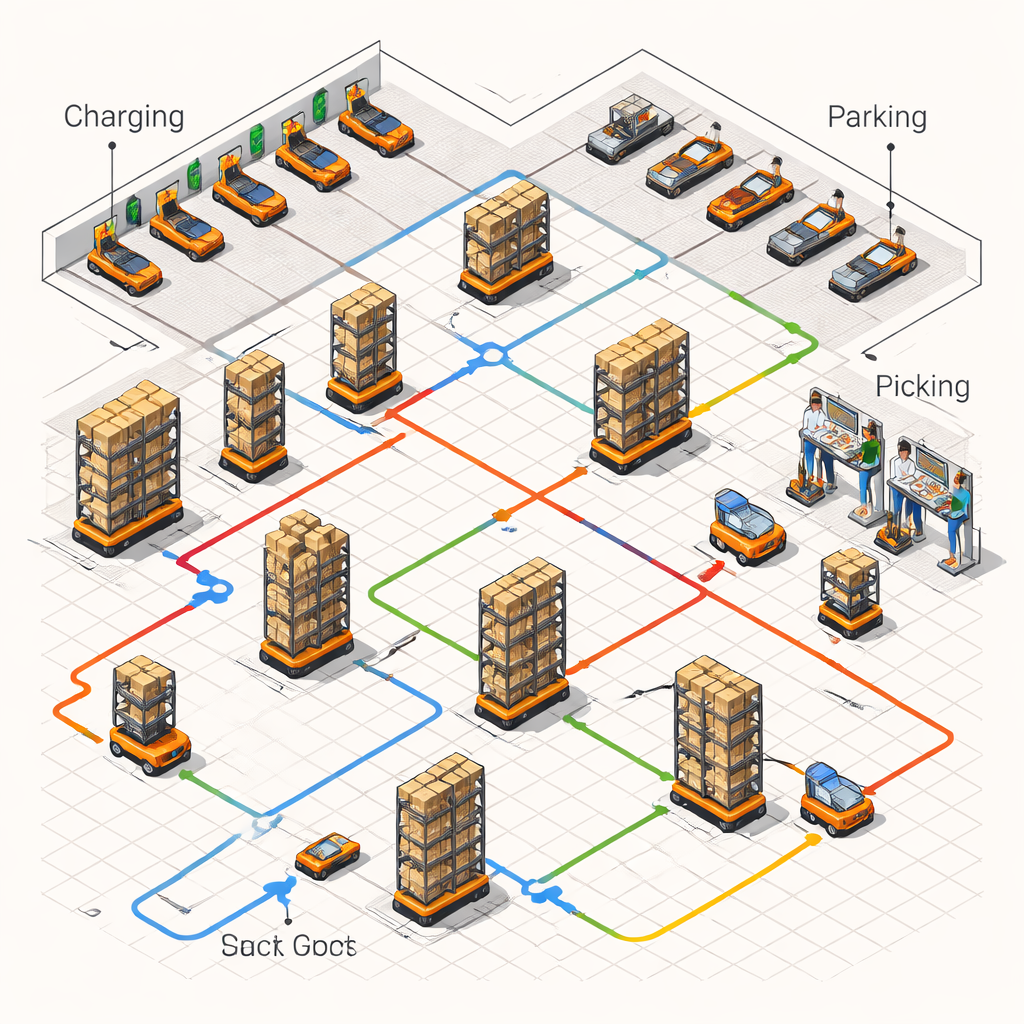
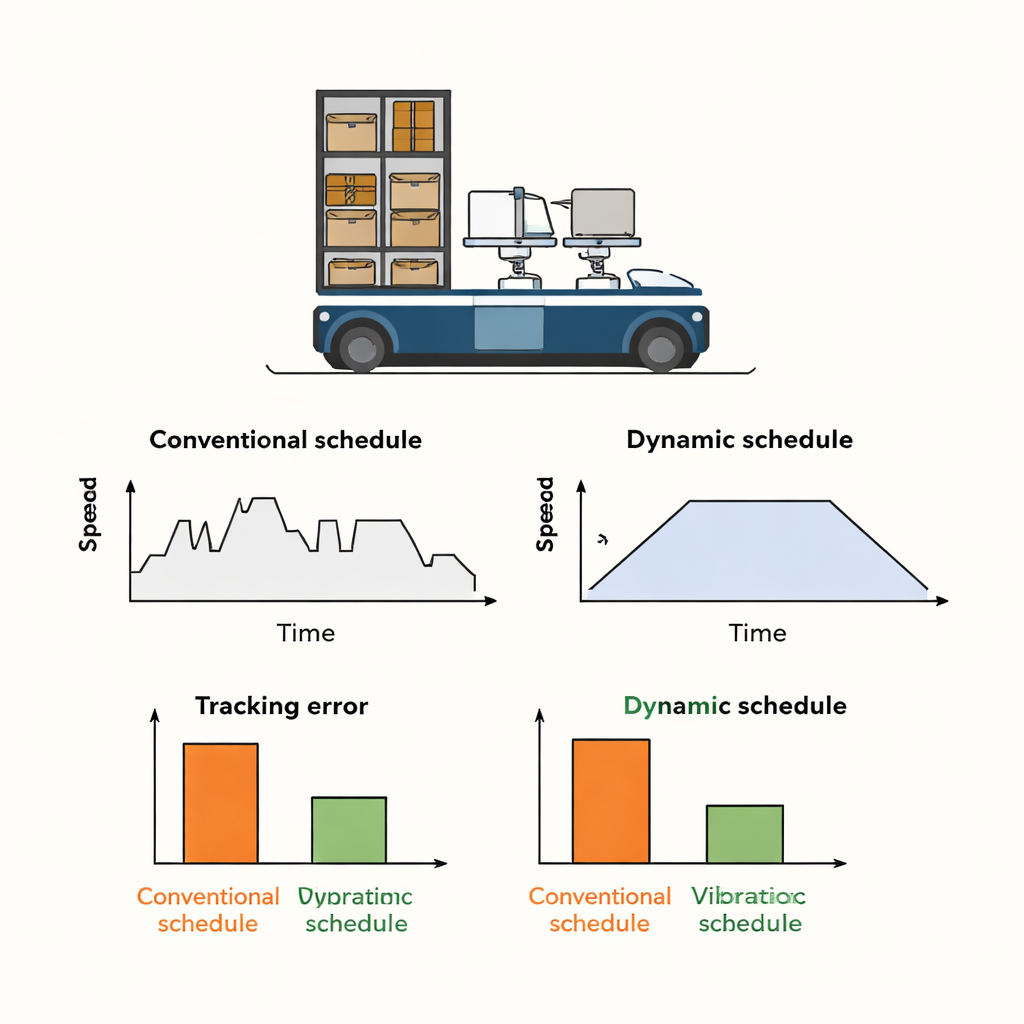
Aby przetestować pomysły, autorzy symulowali AGV w magazynie typu cross-docking w układzie siatki, uwzględniając obszary ładowania, miejsca postojowe i strefy regałów. Porównali swój planer z konwencjonalną metodą zakładającą niemal stałą prędkość i ignorującą szczegółowe fazy ruchu. W jednym z testów robot porusza się po ścieżce w kształcie litery L, a następnie wykonuje skręt o 90 stopni. Tradycyjne podejście generuje gwałtowne zmiany prędkości w narożniku, których rzeczywisty robot nie jest w stanie idealnie odwzorować. Skutkiem są duże błędy śledzenia — rozbieżności między pozycją docelową a rzeczywistą — oraz skoki błędów czasowych w kluczowych punktach. Z nowym planerem ścieżka jest podzielona na jasne fazy przyspieszania, jazdy i hamowania. Symulowany robot śledzi teraz trasę bardzo dokładnie, z dużo mniejszymi błędami i płynniejszymi skrętami.
Łagodniejsze dla paczek i odporne na przyszłość
Drugi zestaw testów koncentruje się na zachowaniu samego ładunku. Przy użyciu konwencjonalnego harmonogramu podstawa robota doświadcza nagłych wstrząsów przyspieszenia, które pobudzają sprężynowe zachowanie regału, powodując silne drgania ładunku. Przy dynamicznym, uwzględniającym ładunek harmonogramie przyspieszenia pozostają w węższym paśmie i zmieniają się łagodniej. Mierzone w czasie, zarówno szczytowe, jak i średnie drgania ładunku spadają wyraźnie, co jest kluczowe dla delikatnych, układanych lub niestabilnych przedmiotów. Autorzy badają też, jak pomijane czynniki, takie jak tarcie kół o podłoże, mogą wpłynąć na ich estymacje i stwierdzają, że w typowych warunkach magazynowych dodatkowy błąd czasowy mieści się w buforach bezpieczeństwa zaimplementowanych w ich algorytmie.
Co to oznacza dla rzeczywistych magazynów
Mówiąc prościej, praca ta uczy harmonogramistów AGV respektować rzeczywisty ruch maszyn, którymi zarządzają. Opierając czasy przejazdu i decyzje o pierwszeństwie na tym, jak szybko roboty rzeczywiście mogą przyspieszać, zwalniać i przewozić różne ładunki bez ich uszkadzania, proponowane ramy ograniczają błędy w śledzeniu trasy, zmniejszają drgania ładunku i redukują ryzyko konfliktów na skrzyżowaniach. Dla operatorów magazynów i producentów przekłada się to na płynniejszy ruch, bezpieczniejsze obchodzenie się z towarami oraz fundament, który można skalować wraz z rozrostem flot i zwiększaniem złożoności układów.
Cytowanie: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Słowa kluczowe: pojazdy prowadzone automatycznie, robotyka magazynowa, harmonogramowanie bez kolizji, planowanie ruchu, inteligentna logistyka