Clear Sky Science · pl
Przyczepianie się quadrotora do ściany za pomocą adaptacyjnego, ciągłego sterowania drugiego rzędu w obecności niepewności
Dlaczego przyczepianie się dronów do ścian ma znaczenie
Wyobraź sobie małego drona, który nie tylko wisi w powietrzu do wyczerpania baterii, lecz potrafi cicho wylądować na ścianie jak ptak i przesiadywać tam przez godziny, obserwując most, pole uprawne lub skraj lasu. Artykuł przedstawia nowy sposób sterowania takimi dronami „przyczepiającymi się”, pozwalający im przylecieć do pionowej powierzchni, nawiązać kontakt bez odskoku i stabilnie się na niej utrzymać, nawet gdy powietrze jest turbulentne albo zachowanie drona nie jest w pełni znane. Praca podejmuje wyzwanie przekształcenia delikatnej maszyny latającej w niezawodne, energooszczędne narzędzie inspekcyjne.
Od latających robotów do zwiadowców przyklejonych do ścian
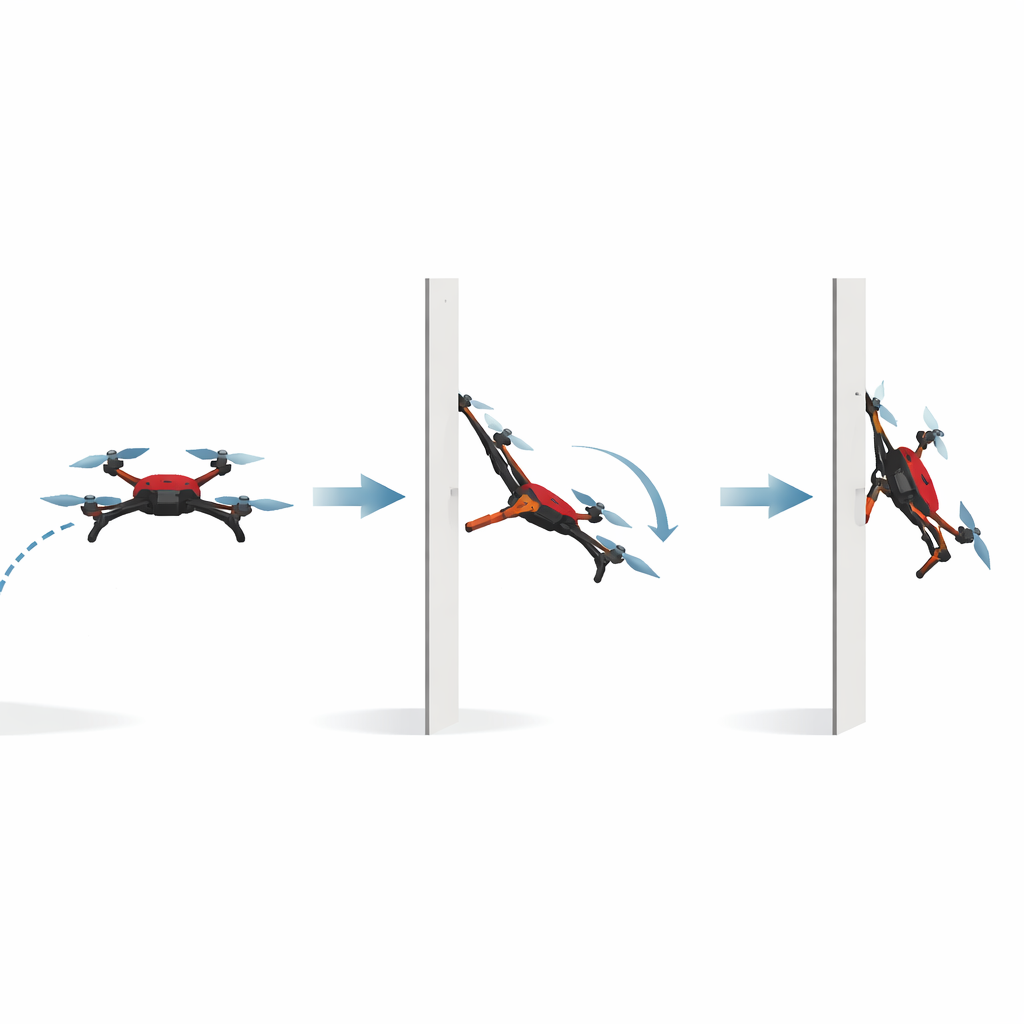
Małe czterowirnikowe drony, czyli quadrotory, są już używane do mapowania, inspekcji budowlanych, monitoringu dzikiej przyrody i precyzyjnego rolnictwa. Ich największym ograniczeniem jest jednak wytrzymałość: zawisanie pochłania energię baterii. Przyczepienie się do powierzchni — takiej jak ściana, słup czy spód mostu — pozwala dronowi wyłączyć większość silników, zachowując jednocześnie sensory w miejscu do długoterminowej obserwacji. Wykonanie tego bezpiecznie jest dalekie od trywialnego. Podczas krótkiego, lecz krytycznego manewru przyczepiania dron musi podejść do ściany, dotknąć jej i obrócić się dziobem w dół bez odbicia, ślizgania się czy utraty kontroli, gdy nieoczekiwane porywy wiatru lub błędy modelowe zakłócą jego ruch.
Wyzwanie czystego lądowania na ścianie
Autorzy badają quadrotora wyposażonego w lekkie ramię wsporcze z przodu, które pełni rolę punktu styku z ścianą. W miarę przejścia drona z lotu swobodnego do kontaktu jego pozycja (bok, przód, góra‑dół) i orientacja (kąty przechylenia, pochylenia i kursu) są ściśle sprzężone: zmiana orientacji zmienia sposób, w jaki ciąg przekłada się na ruch, a gwałtowna siła reakcji od ściany może skręcić kadłub drona. Na to nakładają się efekty świata rzeczywistego — takie jak interakcje aerodynamiczne przy ścianie, drobne błędy konstrukcyjne i szumy sensorów — które występują jako nieznane zaburzenia. Istniejące techniki sterowania odpornego mogą utrzymać drony stabilne, ale często powodują wysokoczęstotliwościowe „drgania” sygnałów sterujących, zużywają podzespoły i jedynie gwarantują, że błędy będą malały stopniowo, a nie w przewidywalnym, krótkim czasie.
Sprytniejszy sposób równoważenia i adaptacji
Aby przezwyciężyć te problemy, artykuł wprowadza schemat adaptacyjnego, ciągłego sterowania drugiego rzędu (ASOCC). Mówiąc prościej, regulator uwzględnia nie tylko, jak daleko ruch drona odbiega od celu, lecz także jak szybko ten błąd się zmienia, i kształtuje swoje polecenia tak, aby obie wielkości zeszły do zera w skończonym czasie. Wbudowany obserwator zaburzeń działa jak „słuchacz hałasu” w czasie rzeczywistym, estymując skumulowany wpływ nieznanych sił i niedopasowań modelu oraz sprzężając te informacje z prawem sterowania. Kluczowe jest to, że wzmocnienia określające, jak mocno regulator reaguje, są dostosowywane w locie na podstawie tych estymat, zamiast być ustalone z góry. Ponieważ sygnały sterujące zmieniają się płynnie zamiast skakać gwałtownie, rozwiązanie znacząco redukuje drgania, zachowując jednocześnie wysoką odporność.
Testy nowego sterowania
Naukowcy najpierw analizują matematykę pary obserwator‑regulator i dowodzą, przy użyciu funkcji typu energii Lyapunova, że wszystkie błędy ruchu zbieżają do zera w skończonym czasie pomimo ograniczonych zaburzeń. Następnie symulują agresywne scenariusze przyczepiania w oprogramowaniu, poddając model drona siłom przypominającym wiatr, losowym szumom pomiarowym i celowym błędom parametrów fizycznych. W tych testach ASOCC prowadził drona przez trzy etapy — przygotowanie, zbliżanie i przyczepianie — utrzymując małe błędy pozycji i orientacji oraz płynne sygnały sterujące. W porównaniu z kilkoma zaawansowanymi alternatywami, w tym popularnymi regulatorami ze strefą przesuwną (sliding‑mode) i regulatorami opartymi na modelu, nowa metoda zredukowała kluczowe miary błędu śledzenia o około 35–55 procent.
Od symulacji do prawdziwego drona na ścianie
Idąc dalej niż symulacje, zespół zbudował miniaturowego quadrotora do przyczepiania, używając komercyjnej płytki lotu i ramy wydrukowanej w 3D z przednim ramieniem. W eksperymentach w pomieszczeniu dron autonomicznie poleciał w stronę nachylonej ściany, wzniósł się do około metra, po czym przechylił dziób w dół, by nawiązać kontakt i pozostać przymocowany. Dane czasowe pokazują, że wysokość, pozycja pozioma i kąt pochylenia ściśle podążają za zadanymi trajektoriami, z jedynie niewielkimi wahaniami spowodowanymi szumem sensorów. Pomimo taniego sprzętu, opóźnień w komunikacji i ograniczeń siłowników, dron nie odbił się ani nie oscylował po uderzeniu, co dowodzi, że ASOCC potrafi poradzić sobie z nieuporządkowanymi realiami lotu.
Co to oznacza dla przyszłych inspektorów latających
Dla osób niebędących ekspertami kluczowy wniosek jest prosty: praca dostarcza strategię sterowania, która pozwala małym dronom niezawodnie przyczepiać się do pionowych powierzchni i tam pozostawać, nawet gdy warunki są dalekie od idealnych. Łącząc płynną, a jednocześnie silnie korygującą kontrolę z adaptacyjnym obserwatorem zaburzeń, metoda umożliwia szybkie, precyzyjne przyczepianie bez drgań i obciążenia sprzętu obserwowanego w wielu sterownikach odpornych. Otwiera to drogę do długotrwałego monitoringu powietrznego z lżejszymi bateriami, prostszymi platformami i większym bezpieczeństwem — ważny krok w kierunku flot autonomicznych „przyklejonych do ścian” robotów, które cicho czuwają nad infrastrukturą, uprawami i środowiskami naturalnymi.
Cytowanie: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Słowa kluczowe: przyczepianie quadrotora, sterowanie adaptacyjne, inspekcja dronem, obserwator zaburzeń, robotyka powietrzna