Clear Sky Science · pl
Opracowanie inteligentnego robota opiekuńczego z ulepszoną autonomiczną nawigacją poprzez optymalizację ścieżek na oddziałach szpitalnych
Roboty, które pomagają pielęgniarkom, a nie je zastępują
Szpitale na całym świecie są pod presją: rośnie liczba starszych pacjentów, przewlekłych chorób, a personel jest przeciążony. W tym badaniu opisano inteligentnego robota opiekuńczego, którego celem nie jest przejęcie pracy pielęgniarki, lecz dyskretne wykonywanie powtarzalnych czynności monitorujących i nocnych kontroli na oddziałach. Dzięki zdolności do bezpiecznego i niezawodnego poruszania się samodzielnie, robot mógłby pomóc pielęgniarkom szybciej wykrywać nagłe zdarzenia — takie jak upadki lub nagłe gorączki — jednocześnie odciążając je z pracy i zmniejszając ryzyko wypadków na zatłoczonych korytarzach i w wąskich futrynach drzwiowych.
Dlaczego szpitalne korytarze są trudne dla robotów
Z pozoru korytarz szpitalny wygląda prosto: proste linie, czyste podłogi, regularne drzwi. Dla robota jest to jednak zupełnie inaczej. Łóżka, wózki, ściany, a zwłaszcza wąskie framugi tworzą ciasne przestrzenie, w których nawet drobny błąd może doprowadzić do kolizji. Wiele istniejących robotów szpitalnych polega na zestawie czujników i skomplikowanym sprzęcie, by sobie z tym radzić. Zespół stojący za tym badaniem obrał inną drogę: postanowił stworzyć robota, który może poruszać się bezpiecznie używając tylko jednego głównego sensora — dwuwymiarowego skanera laserowego mierzącego odległości wokół niego — oraz mądrzejszego sposobu planowania tras.

Budowanie dodatkowego oka pielęgniarki
Naukowcy opracowali inteligentnego robota opiekuńczego (SPCR) na bazie komercyjnej platformy kołowej. Na korpusie zamontowali kamerę 3D do wykrywania upadków i odczytu podstawowych parametrów życiowych bez kontaktu z pacjentem oraz czujnik laserowy 2D na szczycie, który nieustannie skanuje otoczenie wokół w pełnym zakresie. Wewnątrz robota znajduje się wbudowany komputer, baterie, sterowniki napędów i elektronika komunikacyjna pozwalająca na połączenie z aplikacją sterującą i podejmowanie decyzji dotyczących jazdy. Robot potrafi poruszać się w dowolnym kierunku, odchylić ramię kamery, aby przyjrzeć się pacjentowi, i został zaprojektowany do pracy przez kilka godzin w warunkach rzeczywistego szpitala.
Inteligentniejsza mapa zamiast większej liczby urządzeń
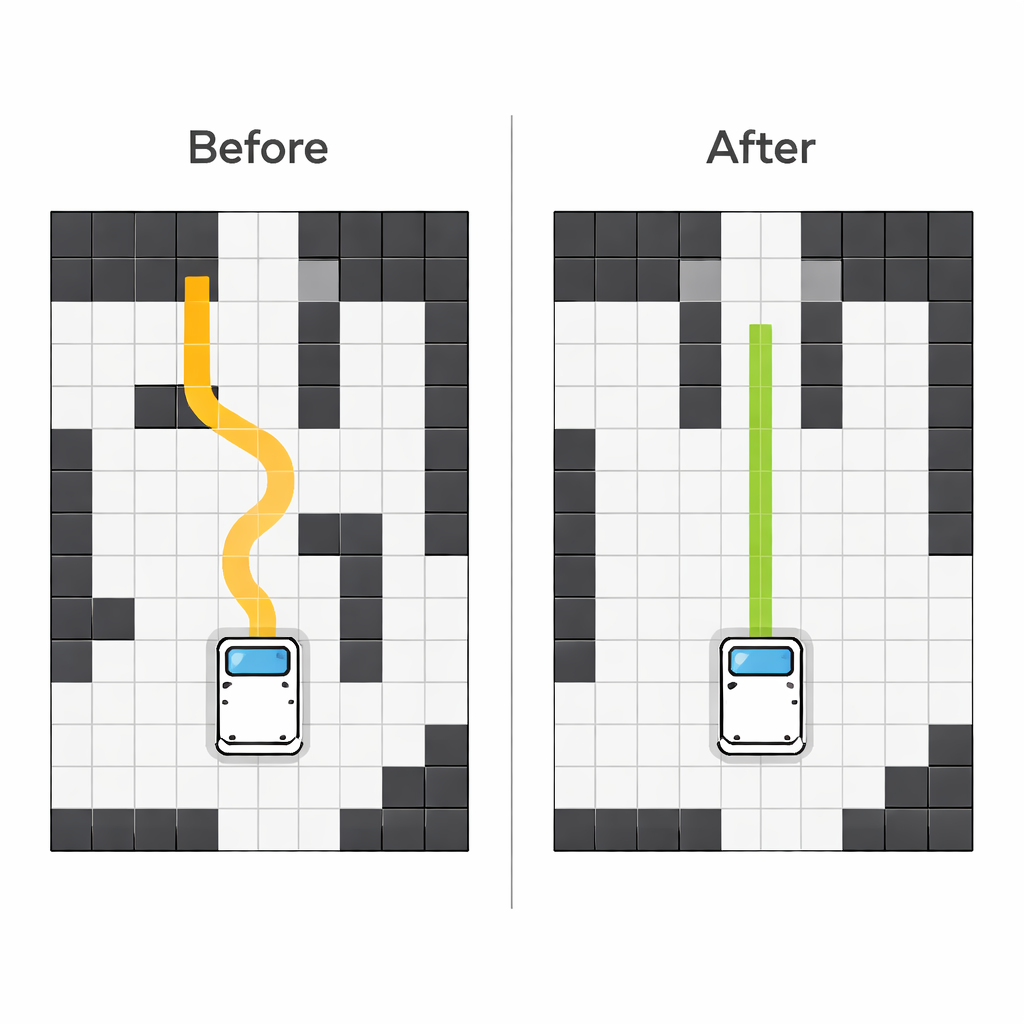
Aby nawigować, robot potrzebuje najpierw mapy wskazującej, gdzie może, a gdzie nie może się poruszać. Zespół zaczynał od dokładnych rysunków korytarza szpitalnego i przekształcił je w siatkową mapę, gdzie każdy maleńki kwadrat jest oznaczony jako przestrzeń wolna, ściana lub przeszkoda. Zamiast pozostawiać mapę bez zmian, przekształcili ją, by była bardziej ostrożna niż rzeczywistość. Wprowadzili „wirtualne przestrzenie przeszkód” — dodatkowe zablokowane obszary, które delikatnie odpychają robota od ryzykownych miejsc, takich jak krawędzie drzwi i ostre zakręty. Oprogramowanie planujące ścieżki, oparte na ulepszonej wersji algorytmu D* Lite, przeszukuje potem tę bezpieczniejszą mapę w poszukiwaniu tras unikających ostrych skrętów i utrzymujących robota bliżej środka wąskich przejść.
Testy robota w rzeczywistych oddziałach
System przetestowano w faktycznym korytarzu szpitalnym podzielonym na trzy odcinki o różnych konfiguracjach korytarzy, drzwi i przeszkód. Robot musiał przemieszczać się między punktami kontrolnymi, przechodzić przez standardowe drzwi o szerokości 90 centymetrów i omijać ściany oraz stałe przedmioty. Ponieważ sam robot ma około 76 centymetrów szerokości, miał tylko kilka centymetrów luzu z każdej strony przy przechodzeniu przez futryny — warunki, w których wiele robotów ma problemy. Porównując wyniki przed i po dostosowaniu mapy siatkowej, badacze stwierdzili, że wskaźnik powodzenia robota w ukończeniu tras bez dotknięcia czegokolwiek wzrósł o ponad 30 procent we wszystkich sekcjach, z płynniejszymi ścieżkami i mniejszą liczbą niepotrzebnych manewrów.
Co to oznacza dla przyszłej opieki nad pacjentem
Dla osób niezaznajomionych z tematem przesłanie jest proste: zamiast obciążać roboty coraz większą liczbą czujników, badanie pokazuje, że staranna cyfrowa konstrukcja mapy i mądrzejsze planowanie tras mogą uczynić roboty szpitalne zarówno bezpieczniejszymi, jak i bardziej praktycznymi. Robot, który potrafi niezawodnie prześlizgnąć się przez wąskie drzwi nocą, podążać efektywnymi trasami i dyskretnie sprawdzać podstawowe parametry pacjentów, mógłby uwolnić pielęgniarki do skupienia się na opiece ludzkiej — pocieszaniu rodzin, podejmowaniu złożonych decyzji i reagowaniu na nagłe wypadki. Autorzy traktują tę pracę jako fundament: przyszłe wersje dodadzą więcej czujników i bogatsze funkcje monitorowania pacjentów, dążąc do niezawodnych, całodobowych asystentów robotycznych poruszających się bezpiecznie w rzeczywistych warunkach szpitalnych.
Cytowanie: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Słowa kluczowe: roboty szpitalne, autonomiczna nawigacja, monitorowanie pacjenta, mapowanie LiDAR, planowanie ścieżek