Clear Sky Science · pl
Współpracująca sieć z wielokrotną uwagą do wykrywania małych obiektów w czasie rzeczywistym na zdjęciach z UAV
Dlaczego ważne jest dostrzeganie drobnych szczegółów z lotu ptaka
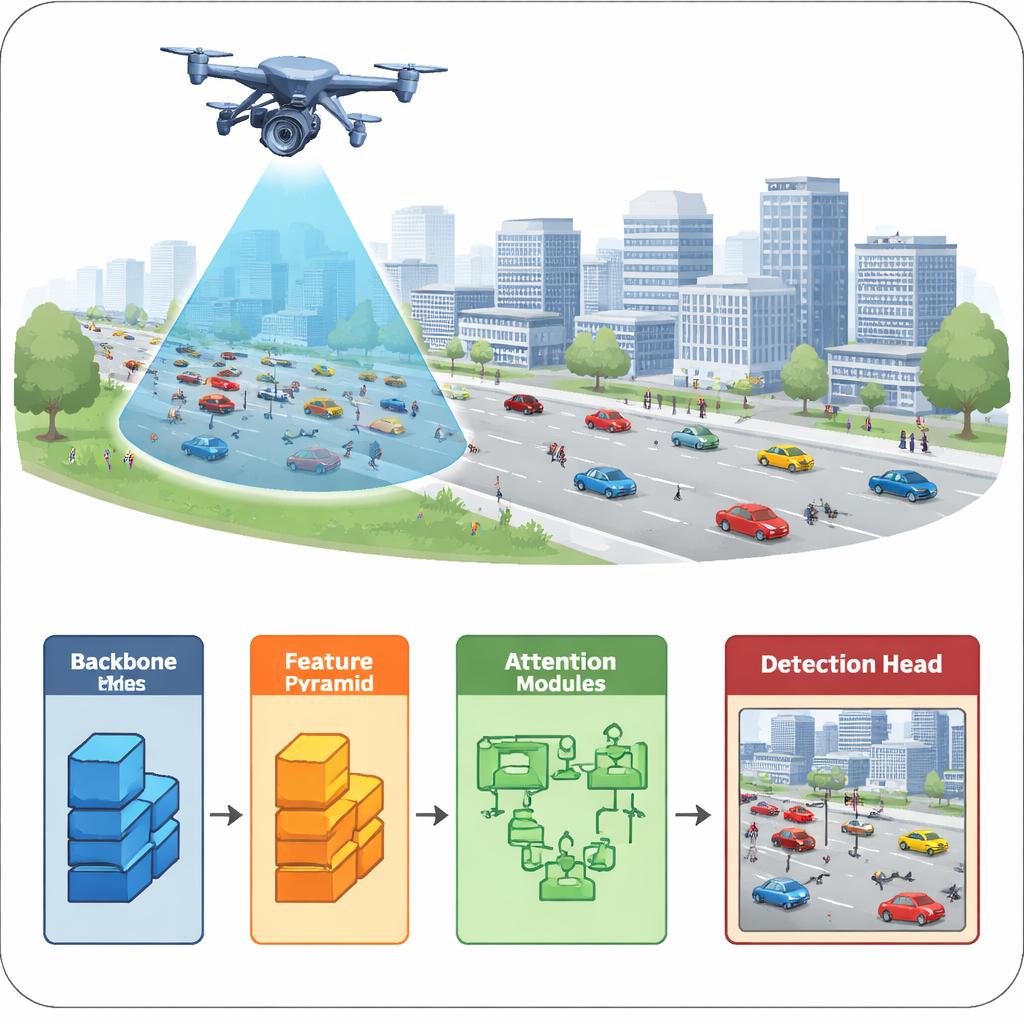
W miarę jak drony stają się powszechnymi narzędziami do monitoringu ruchu, reagowania przy katastrofach i zabezpieczeń, muszą niezawodnie wykrywać bardzo małe obiekty — takie jak samochody, rowery czy ludzie — widoczne z dużej wysokości. W tych ujęciach z powietrza cele zajmują zaledwie kilka pikseli i łatwo znikają w cieniu, odblaskach i złożonym tle. Artykuł przedstawia nowy system widzenia komputerowego, nazwany Collaborative Multi-Attention Network (CMA-Net), zaprojektowany do szybkiego i wystarczająco dokładnego wykrywania takich małych obiektów na obrazach z dronów, tak by nadać się do zastosowań w czasie rzeczywistym.
Wyzwania związane z dostrzeganiem małych obiektów z dużej wysokości
Wykrywanie małych obiektów na zdjęciach z dronów jest trudniejsze niż na zwykłych zdjęciach ulicznych. Ponieważ drony latają wysoko i oglądają sceny pod różnymi kątami, pojazdy i ludzie wyglądają na bardzo mali i często są rozmyci, a oświetlenie może się gwałtownie zmieniać. Tradycyjne detektory dwuetapowe mogą być bardzo dokładne, ale często są zbyt wolne do pracy w czasie rzeczywistym na platformach latających o ograniczonej mocy obliczeniowej i przepustowości łączności. Szybsze metody jednowarstwowe działają w czasie rzeczywistym, lecz mają tendencję do pomijania małych celów, ponieważ ich detale stopniowo zanikają w miarę przetwarzania obrazu warstwa po warstwie. Autorzy argumentują, że lepsze wykrywanie małych obiektów wymaga inteligentniejszych sposobów łączenia informacji między skalami i skierowania uwagi obliczeniowej na najbardziej informatywne części obrazu.
Budowanie mądrzejszej drabiny cech
CMA-Net zaczyna od powszechnie stosowanego rdzenia przetwarzania obrazu, ResNet-50, a następnie dodaje Efektywną Dwukierunkową Sieć Piramidy Cech (E-BiFPN). Ta struktura tworzy coś w rodzaju drabiny map cech o różnych rozmiarach, pozwalając systemowi łączyć drobne szczegóły z wczesnych warstw z bardziej abstraktnym kontekstem z głębszych warstw. W przeciwieństwie do wcześniejszych projektów, E-BiFPN przycina zbędne warstwy wysokiego poziomu i dodaje specjalny lekki blok przetwarzający wykorzystujący częściowe konwolucje, aby zmniejszyć nakład obliczeń. Schemat ważonego fuzjowania uczy się następnie, ile ufać płytkim versus głębokim cechom na każdej skali, tak by wzmocnić kruche informacje o malutkich samochodach czy pieszych, jednocześnie redukując szum tła.
Nauka, gdzie patrzeć
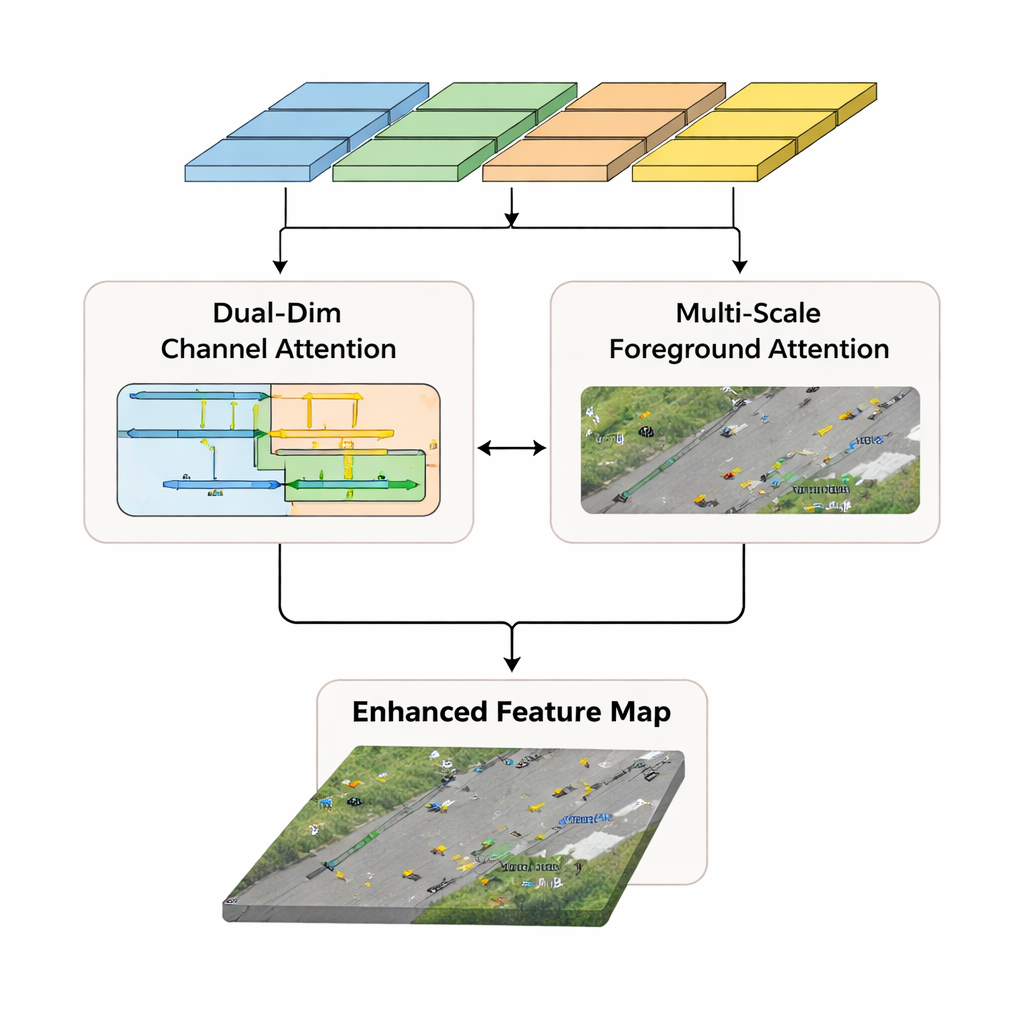
Ponad restrukturyzacją cech, CMA-Net używa mechanizmów uwagi, które naśladują sposób, w jaki ludzie skupiają się na istotnych częściach sceny. Moduł Dual-Dimensional Channel Attention (DDCA) analizuje cechy oddzielnie wzdłuż szerokości i wysokości obrazu, zamiast kompresować wszystko do jednego globalnego podsumowania. To rozwiązanie pomaga sieci wychwycić dalekozasięgowe wzorce zarówno w kierunku poziomym, jak i pionowym, zachowując wskazówki lokalizacyjne, które są kluczowe, gdy małe obiekty zlewają się ze skomplikowanym otoczeniem. Równolegle moduł Multi-Scale Foreground Attention (MSFA) łączy duże, łatwo rozpoznawalne obiekty w głębszych warstwach z mniejszymi w płytszych warstwach. Próbkując i łącząc informacje z trzech skal, MSFA uczy się wyróżniać obszary pierwszoplanowe, gdzie prawdopodobnie znajdują się pojazdy, i tłumić mylące tekstury tła.
Od ulepszonych cech do szybkich decyzji
Wyjścia gałęzi DDCA i MSFA są scalane w bogate mapy cech przyjazne dla wykrywania małych obiektów, które trafiają do „głowy” detekcyjnej bez kotwic (anchor-free). Zamiast polegać na gęstej siatce z góry zdefiniowanych ramek, ta głowa bezpośrednio przewiduje zarówno kategorię, jak i pozycję obiektów, upraszczając obliczenia i czyniąc szkolenie bardziej elastycznym. Autorzy ocenili CMA-Net na dwóch wymagających publicznych zbiorach danych z dronów, UAVDT i Stanford Drone, które obejmują zatłoczone drogi, zróżnicowane warunki pogodowe oraz zmiany dzień–noc. CMA-Net osiągnął wskaźniki dokładności 67,2% i 62,0% na tych zbiorach, pracując przy 64 klatkach na sekundę, co oznacza, że może przetwarzać wideo w czasie rzeczywistym, przewyższając wiele popularnych detektorów, w tym niektóre wersje z rodziny YOLO oraz bardziej złożone modele oparte na transformatorach.
Co to oznacza dla praktycznego użycia dronów
Dla osób niebędących specjalistami kluczowe wnioski są takie, że CMA-Net znacząco poprawia zdolność drona do zauważania małych, trudnych do dostrzeżenia obiektów, nie spowalniając przy tym pracy. Poprzez staranne łączenie informacji na wielu skalach i kierowanie uwagi sieci zarówno w obrębie kanałów obrazu, jak i między pierwszym planem a tłem, metoda zapobiega pomijaniu drobnych pojazdów i ludzi. To połączenie dokładności i szybkości sprawia, że podejście jest obiecujące dla praktycznych zastosowań, takich jak inteligentny monitoring ruchu, obserwacja tłumów czy ratownictwo, gdzie przeoczenie małego obiektu lub zbyt wolna reakcja mogą mieć poważne konsekwencje.
Cytowanie: Yang, J., Yue, X. & Wu, L. A collaborative multi-attention network for real-time small object detection in UAV imagery. Sci Rep 16, 5852 (2026). https://doi.org/10.1038/s41598-026-36440-2
Słowa kluczowe: wizja dronów, wykrywanie małych obiektów, nadzór w czasie rzeczywistym, sieci z mechanizmami uwagi, monitoring ruchu