Clear Sky Science · pl
Sieć łącząca informacje krawędziowe między etapami do wykrywania małych obiektów na zdjęciach lotniczych
Dlaczego ważne jest dostrzeganie drobnych szczegółów z nieba
Od monitoringu ruchu i reagowania w sytuacjach kryzysowych po opiekę nad uprawami — coraz więcej aspektów naszego świata jest obserwowanych z góry przez drony. W wielu z tych obrazów interesujące nas obiekty — ludzie, samochody czy zwierzęta — zajmują jednak tylko kilka pikseli szerokości. Niniejszy artykuł przedstawia nowy system wizji komputerowej, CEIFNet, zaprojektowany specjalnie do wykrywania takich maleńkich obiektów dokładniej i szybciej, nawet gdy są one otoczone zagraconą scenerią miejską, polami czy nocnym szumem.
Dostrzeganie drobnych elementów w dużym obrazie
Standardowe systemy wykrywania obiektów powstały głównie z myślą o zdjęciach z poziomu ziemi, gdzie samochód czy osoba zazwyczaj zajmuje widoczną część kadru. Na zdjęciach z drona kamera może znajdować się setki metrów nad ziemią, więc każdy cel jest maleńki i łatwo rozmywa się lub ginie podczas redukcji rozmiaru wewnątrz sieci neuronowej. Autorzy wyjaśniają, że popularne detektory jednego przebiegu, takie jak rodzina YOLO, sprawdzają się w codziennych scenach, lecz mają trudności, gdy obiekty są jednocześnie bardzo małe i silnie zróżnicowane pod względem rozmiaru. Wielokrotne próbkowanie w dół, służące zrozumieniu całej sceny, ma tendencję do wymazywania subtelnych sygnałów pochodzących od tych małych celów.
Łączenie widzenia zbliżeniowego z kontekstem całościowym
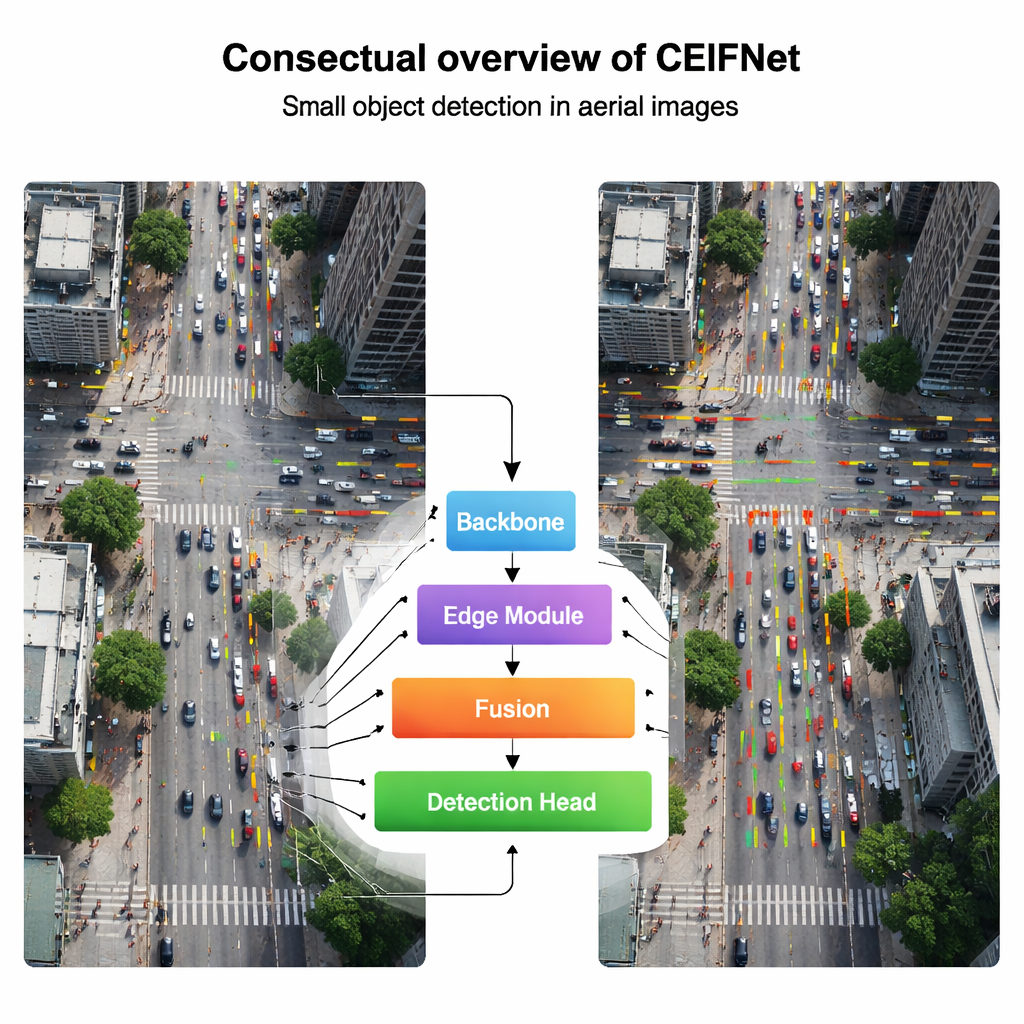
Aby temu zaradzić, CEIFNet łączy dwa komplementarne sposoby analizy obrazu. Jedna ścieżka używa klasycznych filtrów konwolucyjnych, które dobrze wychwytują ostre lokalne wzorce, takie jak narożniki i tekstury. Druga ścieżka korzysta z mechanizmu uwagi w stylu transformera, który świetnie radzi sobie z powiązaniem odległych części obrazu i rozumieniem sceny jako całości. W rdzeniowym bloku konstrukcyjnym, zwanym krzyżowym blokiem transformera, napływające cechy obrazu są dzielone: większość kanałów przechodzi przez lekką ścieżkę konwolucyjną, podczas gdy mniejsza część trafia do ścieżki uwagi, która rozważa relacje na dużą skalę. Następnie są one ponownie łączone, co daje sieci zarówno drobne detale, jak i globalne rozeznanie bez znaczącego wzrostu kosztu obliczeniowego.
Wykorzystanie krawędzi jako mapy dla maleńkich celów
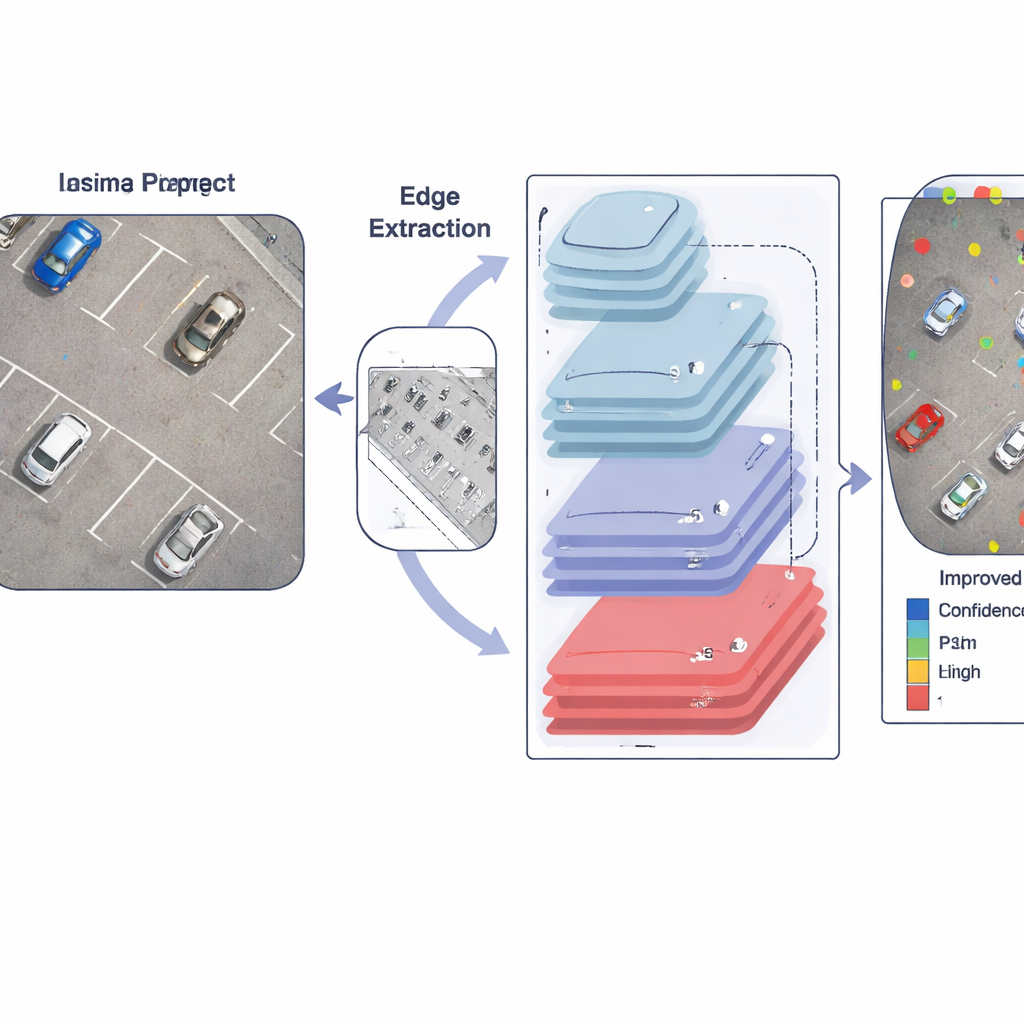
Kluczowym wnioskiem artykułu jest to, że granice obiektów — krawędzie — mają szczególną wartość, gdy cele liczą tylko kilka pikseli. Zamiast opierać się wyłącznie na uczonych filtrach, autorzy celowo wprowadzają informacje o krawędziach do sieci. Dedykowany moduł najpierw stosuje operator Sobela, prosty, lecz odporny detektor krawędzi, aby uwydatnić miejsca gwałtownych zmian jasności, np. wokół konturów samochodów czy osób. Mapy krawędzi są następnie agregowane w kilku rozmiarach, aby dopasować je do różnych skal cech i łączone przez moduł międzykanałowy. W miarę jak obraz przenika głębiej do sieci, te wyostrzone wskazówki krawędziowe są wielokrotnie podawane do kolejnych warstw, pomagając modelowi śledzić, gdzie zaczynają i kończą się małe obiekty, mimo typowego rozmycia i zmniejszania rozdzielczości.
Dopasowanie do rozmiaru, położenia i złożoności sceny
Na wyjściu CEIFNet korzysta z dynamicznej głowicy detekcyjnej, która potrafi dostosować swoje zachowanie zależnie od obserwowanej sceny. Zamiast stosować stałe filtry, ta końcowa faza nakłada jednocześnie trzy formy uwagi: może faworyzować określone rozmiary obiektów, skoncentrować się na najbardziej obiecujących lokalizacjach na obrazie oraz podkreślić najbardziej informacyjne kanały cech. W połączeniu ze strukturą piramidy cech, która zachowuje dodatkową warstwę o bardzo drobnej skali, system staje się bardziej czuły na drobne, gęsto rozmieszczone cele w realistycznych nagraniach z dronów — od zatłoczonych skrzyżowań po pełne parkingi i sceny w podczerwieni termicznej nocą.
Udowodnienie przewagi w rzeczywistych scenariuszach dronowych
Naukowcy przetestowali CEIFNet na dwóch wymagających zbiorach danych z dronów: VisDrone2019, obejmującym dzienne sceny miejskie i podmiejskie, oraz HIT-UAV, zbiór w podczerwieni termicznej, w którym wiele celów jest słabych i małych. W obu przypadkach nowy system wykrywał obiekty dokładniej niż mocna baza oparta na YOLO oraz szereg innych nowoczesnych detektorów, jednocześnie pracując wystarczająco szybko, by nadawać się do użytku w czasie rzeczywistym na wydajnej karcie graficznej. Skrupulatne eksperymenty ablacyjne wykazały, że każdy element — hybrydowy blok, moduł krawędziowy, dodatkowa drobna warstwa i dynamiczna głowica — przyczyniał się do ogólnego wzrostu wydajności.
Co to oznacza dla codziennej technologii
Dla osób spoza specjalizacji kluczowy wniosek jest taki, że CEIFNet oferuje inteligentniejszy sposób, by drony „dostrzegały drobne rzeczy” w dużych, złożonych scenach. Zachowując informacje o krawędziach, łącząc lokalne detale z kontekstem globalnym i dynamicznie dostosowując uwagę, sieć potrafi wykrywać małe obiekty, które inne systemy pomijają albo błędnie lokalizują. To sprawia, że monitoring z powietrza jest bardziej niezawodny w zadaniach takich jak bezpieczeństwo ruchu, poszukiwania i ratownictwo czy precyzyjne rolnictwo, oraz wskazuje kierunek rozwoju przyszłych systemów wyciągających wiarygodne informacje z coraz wyższych i szerszych perspektyw naszego świata.
Cytowanie: Xiao, J., Li, C., Chen, H. et al. Cross-stage edge information fusion network for small object detection in aerial images. Sci Rep 16, 7639 (2026). https://doi.org/10.1038/s41598-026-36251-5
Słowa kluczowe: wykrywanie obiektów z powietrza, małe obiekty, obrazowanie dronowe, widzenie oparte na krawędziach, uczenie głębokie