Clear Sky Science · pl
Sterowanie predykcyjne napędzane uczeniem wzmacniającym do optymalizacji przeciwbieżnego synchronicznego silnika z magnesami trwałymi w systemie napędu okrętu podwodnego
Mądrzejsze silniki dla bardziej skrytych okrętów podwodnych
Nowoczesne okręty podwodne opierają się na cichym, wydajnym napędzie, by eksplorować oceany i realizować misje naukowe, handlowe lub obronne. W badaniu opisano specjalny typ silnika elektrycznego napędzającego dwa śmigła obracające się w przeciwnych kierunkach, co ułatwia jednostce płynne i ciche poruszanie się pod wodą. Naukowcy pokazują, jak połączenie zaawansowanych narzędzi predykcyjnych z algorytmem uczącym może utrzymać te silniki w stanie stabilnym i efektywnym, nawet gdy fale, prądy i gwałtowne manewry je zakłócają.
Dwa śmigła, jeden stabilny okręt
Tradycyjne systemy z pojedynczym śmigłem mogą powodować skręcanie i kołysanie jednostki, szczególnie przy dużych prędkościach, co utrudnia sterowanie i zwiększa wykrywalność. Aby temu zapobiec, inżynierowie stosują układy z przeciwbieżnymi śmigłami: dwa śmigła zamontowane na tej samej osi, obracające się w przeciwnych kierunkach. W centrum takiego rozwiązania znajduje się przeciwbieżny synchroniczny silnik z magnesami trwałymi (CRPMSM), będący w istocie dwoma zwartymi, wysokoprądowymi silnikami ułożonymi razem. Takie rozwiązanie kompensuje niepożądane momenty skręcające, poprawia wykorzystanie energii i redukuje hałas — wszystko to ma kluczowe znaczenie dla skrytości i długotrwałych misji pod powierzchnią. Jednak gdy obciążenie na dwóch wirnikach staje się niezrównoważone, np. w burzliwych warunkach lub podczas ostrych skrętów, utrzymanie synchronicznego obrotu obu stron staje się poważnym wyzwaniem sterowania. 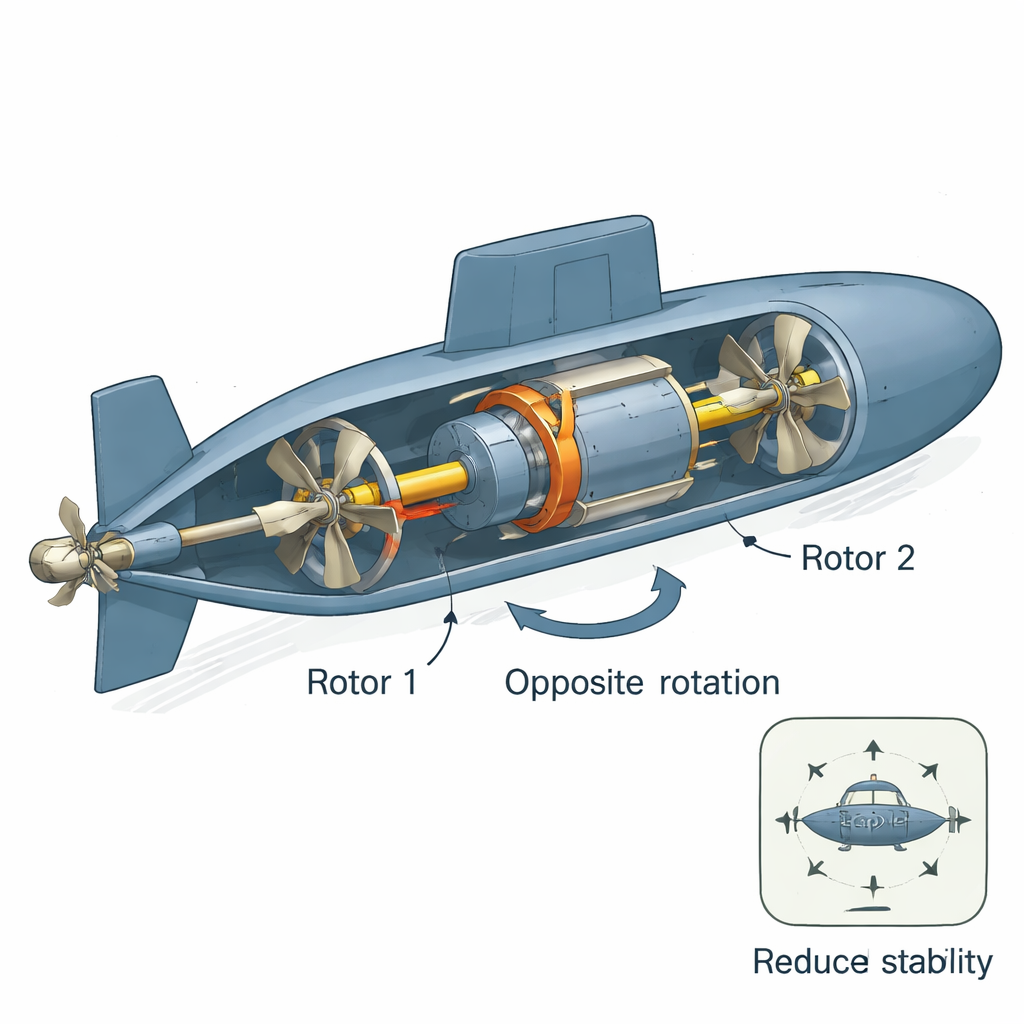
Dlaczego konwencjonalne sterowanie nie wystarcza
Inżynierowie wypróbowali wiele strategii sterowania, aby utrzymać synchronizację i wydajność wirników CRPMSM. Metody takie jak sterowanie zorientowane na pole czy bezpośrednie sterowanie momentem mogą dobrze działać w spokojnych, przewidywalnych warunkach, ale zawodzą, gdy środowisko podwodne szybko się zmienia lub jest silnie niejednorodne. Bardziej zaawansowane techniki, takie jak sterowanie typu sliding-mode, rozmyte czy adaptacyjne, poprawiają odporność, lecz często opierają się na bardzo dokładnych modelach matematycznych silnika i otaczającej wody. W praktyce modele te nigdy nie są doskonałe, a rozbieżności mogą prowadzić do zwiększonego tętnienia momentu, wolniejszego odzyskiwania po zakłóceniach i marnotrawstwa energii. Sterowanie predykcyjne modelowe (MPC), które planuje optymalne działania sterujące w krótkim horyzoncie przyszłości, zapewnia szybką reakcję, ale wciąż jest silnie uzależnione od jakości modelu bazowego.
Hybrydowy regulator uczący się w działaniu
Autorzy proponują hybrydowe podejście RL-MPC (Reinforcement Learning-driven Model Predictive Control), łączące zalety obu metod. MPC wykorzystuje model matematyczny CRPMSM do przewidywania, jak prądy, momenty i prędkość będą się zmieniać w kolejnych krokach sterowania, i wybiera komendy napięciowe mające śledzić zadane prędkości i prądy przy zachowaniu ograniczeń. Na to nakłada się agent uczenia wzmacniającego oparty na algorytmie Twin Delayed Deep Deterministic Policy Gradient (TD3), który obserwuje rzeczywiste zachowanie silnika. Otrzymując nagrody za niewielkie błędy prędkości, błędy prądu i za umiarkowany wysiłek sterujący, agent stopniowo koryguje wyjścia MPC, kompensując błędy modelu, niezrównoważone obciążenia i zakłócenia zewnętrzne. Etap modulacji szerokości impulsu z przestrzeni wektorowej (space-vector PWM) przekształca te zoptymalizowane komendy napięciowe w sygnały przełączające dla falownika napędzającego silnik.
Testy inteligentnego napędu
Aby ocenić podejście, badacze zbudowali szczegółową symulację systemu przeciwbieżnego silnika o mocy 120 kW w MATLAB/Simulink i przetestowali ją w trzech realistycznych scenariuszach operacyjnych. W pierwszym silnik pracował ze stałą prędkością, podczas gdy obciążenie obu wirników zmieniało się, ale pozostawało zrównoważone; w drugim prędkość była zmienna przy stałym obciążeniu; w trzecim, najbardziej wymagającym przypadku, wirniki doświadczały różnych obciążeń przy ustalonym zadaniu prędkości. W każdym scenariuszu RL-MPC porównywano bezpośrednio z konwencjonalnym MPC przy tych samych horyzontach predykcji i sterowania. 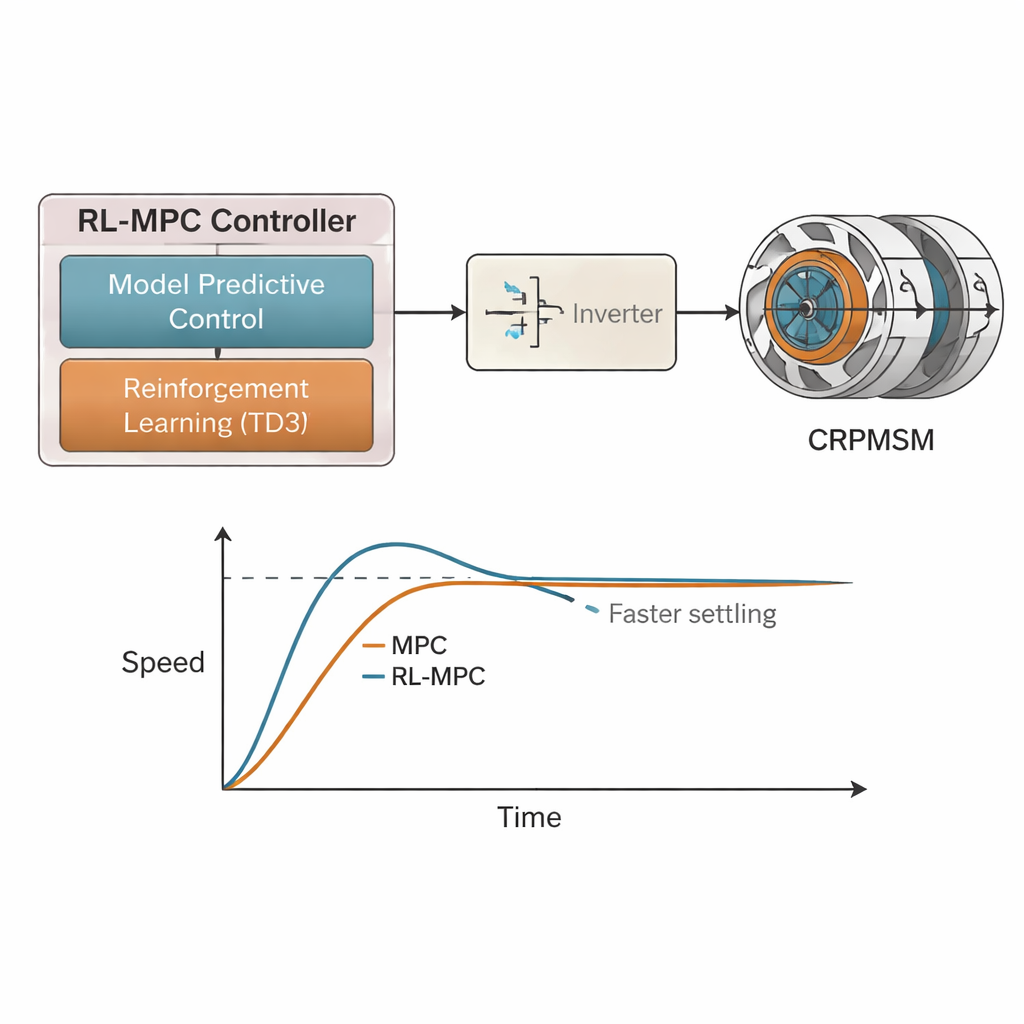
Szybsza reakcja, czystsze prądy, lepsza synchronizacja
Hybrydowy regulator RL-MPC konsekwentnie przewyższał standardowy MPC we wszystkich testach. Gdy obciążenia lub prędkości zmieniały się gwałtownie, RL-MPC zmniejszał przeregulowanie prędkości z około 30% do około 15–16,6% i skracał czas ustalania się z około 1,4 sekundy do 0,7 sekundy. Tętnienia momentu były mniejsze, a dwa przeciwbieżne wirniki pozostawały ściśle zsynchronizowane, nawet gdy jeden z wirników był bardziej obciążony. Równie istotne, jakość prądów stojana poprawiła się znacząco: całkowite zniekształcenia harmoniczne spadły o ponad 60% podczas gwałtownych, niezrównoważonych przejść — z 9,3% dla MPC do 3,4% dla RL-MPC, osiągając w stanie ustalonym wartości rzędu 2–3%. Czystsze prądy oznaczają mniejsze nagrzewanie, cichszą pracę i wyższą ogólną efektywność.
Znaczenie dla przyszłych pojazdów podwodnych
Dla czytelnika niebędącego specjalistą kluczowy wniosek jest taki, że dodanie warstwy uczącej nad sterownikiem predykcyjnym sprawia, iż silniki okrętów podwodnych są zarówno inteligentniejsze, jak i bardziej odporne. Zamiast polegać wyłącznie na stałych równaniach, które mogą zawieść, gdy morze stanie się wzburzone lub jednostka gwałtownie manewruje, ramy RL-MPC potrafią adaptować się w locie, utrzymując silnik z dwoma wirnikami zsynchronizowany, responsywny i wydajny. Chociaż dotychczasowe wyniki opierają się na symulacji i będą wymagać weryfikacji w sprzęcie oraz na prawdziwym morzu, praca ta wskazuje kierunek rozwoju pojazdów podwodnych, które będą przemieszczać się dalej przy tym samym zasobie energii, generować mniej hałasu i pozostawać stabilne oraz sterowne w trudnych warunkach.
Cytowanie: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Słowa kluczowe: napęd okrętu podwodnego, silnik przeciwbieżny, sterowanie uczeniem wzmacniającym, sterowanie predykcyjne modelowe, pojazdy podwodne