Clear Sky Science · pl
Strategia bezczujnikowego sterowania położeniem dla PMSM przy pełnej prędkości oparta na ulepszonym super-twistingowym obserwatorze stanu ślizgowego i optymalizacji płynnego przejścia
Utrzymanie inteligencji silników elektrycznych bez dodatkowego sprzętu
Od samochodów elektrycznych po siłowniki lotnicze — wiele współczesnych maszyn wykorzystuje specjalny typ silnika elektrycznego zwany silnikiem synchronicznym z magnesami trwałymi (PMSM). Te silniki są wydajne i mocne, ale zwykle wymagają precyzyjnych czujników do śledzenia prędkości obrotowej i położenia wirnika. Czujniki zwiększają koszty i mogą zawodzić w trudnych warunkach. W tym badaniu sprawdzono, jak prowadzić te silniki płynnie i dokładnie w całym zakresie prędkości bez użycia mechanicznych czujników.
Dlaczego pozbycie się czujników jest takie trudne
W typowym układzie napędowym PMSM na wał silnika montuje się małe czujniki położenia, które informują system sterowania, gdzie dokładnie znajduje się wirnik. Ta informacja jest kluczowa, by wtłaczać prąd w uzwojenia w odpowiednim momencie, jak precyzyjnie wycelowany pchnięcie na karuzeli. Jednak czujniki mogą być kruche, zajmować miejsce i być kosztowne. Inżynierowie od dawna próbują je zastąpić metodami „bezczujnikowymi”, które wywnioskowują położenie wirnika z własnych sygnałów elektrycznych silnika. Problem polega na tym, że żadna pojedyncza metoda nie działa dobrze przy każdej prędkości. Przy niskich prędkościach typowe objawy elektryczne są słabe, natomiast przy dużych prędkościach proste sztuczki stają się zaszumione i niedokładne. Pokonanie tej luki bez szarpnięć, wibracji czy utraty sterowności to stałe wyzwanie.
Dwa sprytne sposoby „nasłuchiwania” silnika
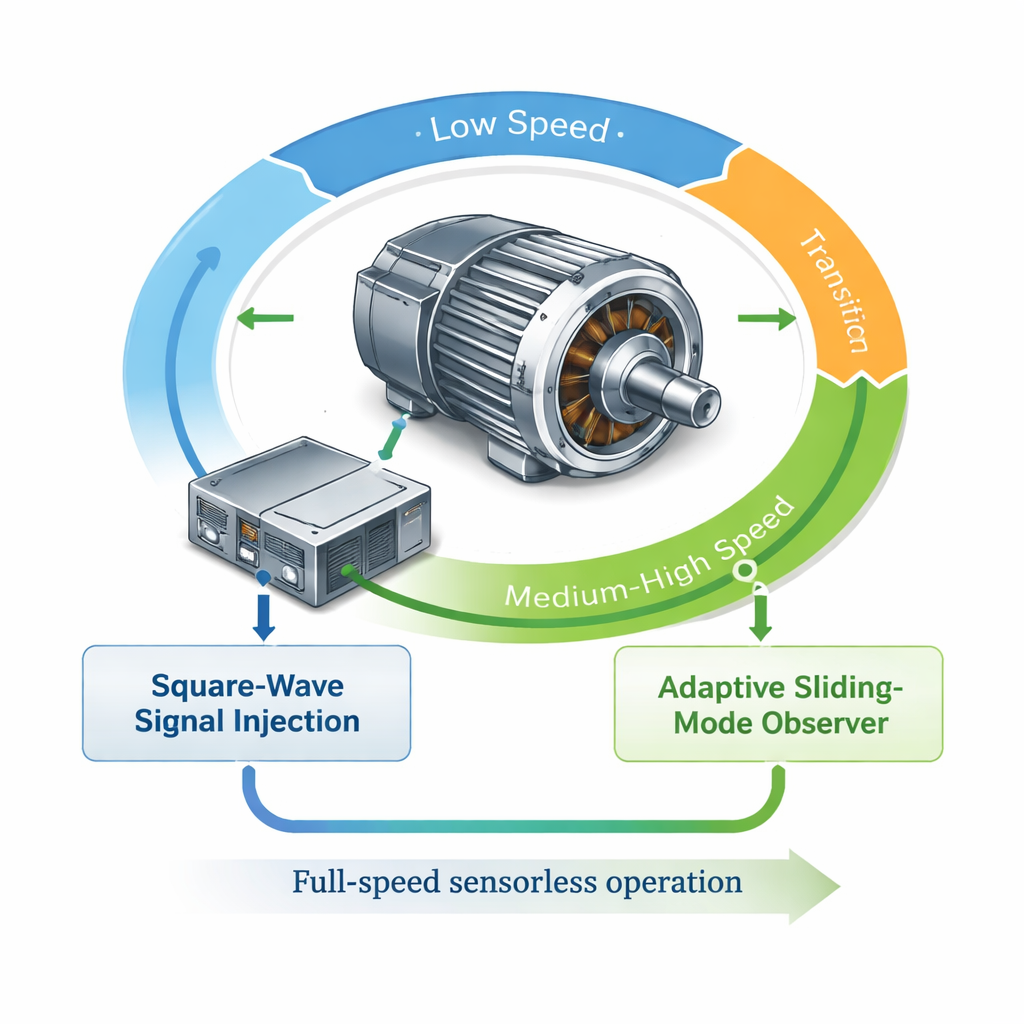
Aby objąć pełny zakres prędkości, autorzy łączą dwie uzupełniające się techniki bezczujnikowe. Przy niskich prędkościach, gdzie naturalne sprzężenie elektryczne silnika jest zbyt małe, aby je wiarygodnie zmierzyć, celowo wstrzykują do uzwojeń szybki, prostokątny sygnał napięciowy. Silnik reaguje inaczej w zależności od kąta wirnika, więc analizując powstały prąd o wysokiej częstotliwości, sterownik może odczytać położenie wirnika. Podejście to przypomina wysłanie delikatnego sygnału probe i odczytanie echa. Przy średnich i wysokich prędkościach silnik generuje silniejsze naturalne sprzężenie zwrotne, znane jako elektromotoryczna siła przeciwna (back EMF). W tym zakresie zespół wykorzystuje zaawansowany obserwator matematyczny, który śledzi zachowanie silnika i estymuje położenie oraz prędkość wirnika na podstawie zmierzonych napięć i prądów.
Uczynienie obserwatora cyfrowego mądrzejszym i cichszym
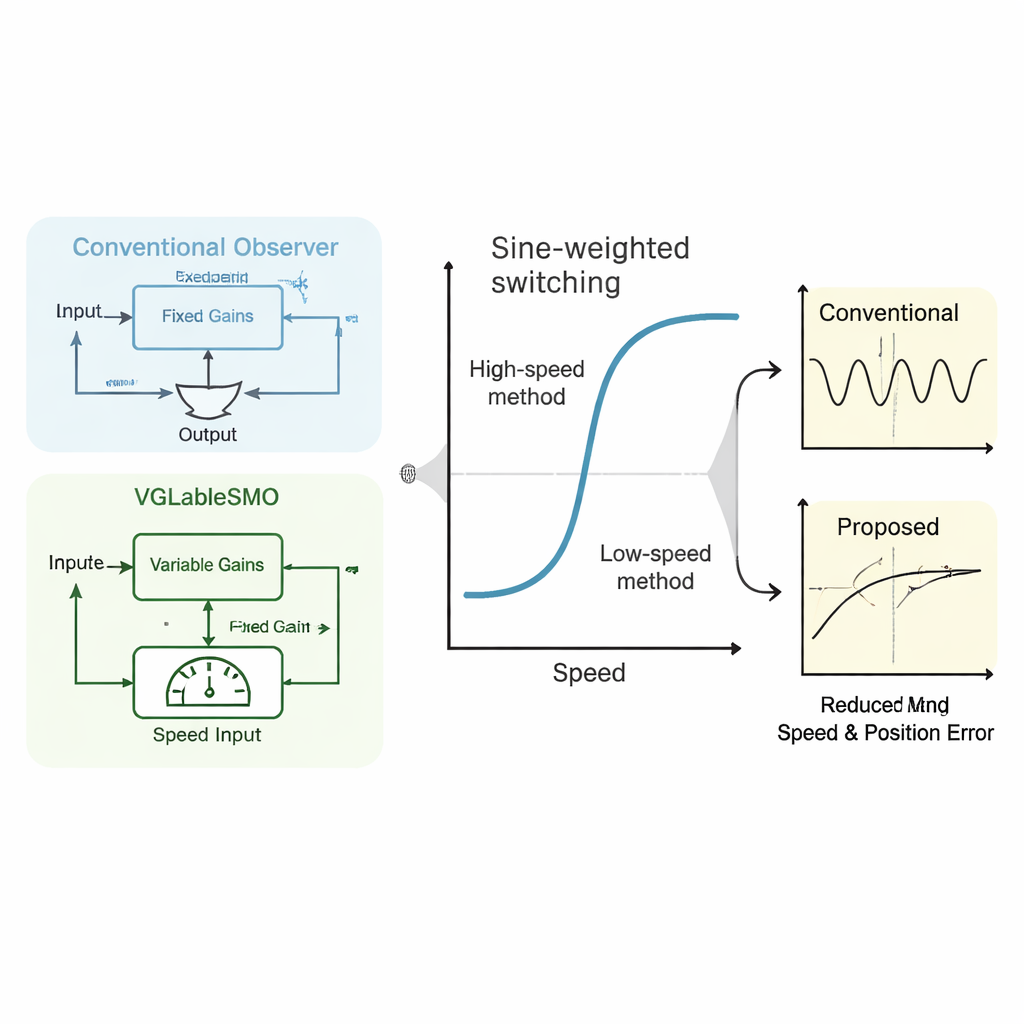
Główną innowacją po stronie wysokich prędkości jest ulepszony obserwator nazwany zmiennoprądowym liniowym super-twistingowym obserwatorem stanu ślizgowego (VGLSTSMO). Tradycyjne obserwatory stanu ślizgowego cenione są za odporność na zakłócenia i szum, ale często cierpią na „drganie” (chattering), czyli drobne, szybkie oscylacje, które mogą przenosić się na moment obrotowy i prędkość. Ponadto opierają się na stałych ustawieniach wewnętrznych, które mogą dobrze działać w jednym warunku pracy, a słabo w innym. Proponowany obserwator automatycznie dostosowuje swoje wzmocnienia wraz ze zmianą prędkości silnika i dodaje termin korekcyjny, który łagodnie pociąga estymaty w kierunku wartości rzeczywistych. Mechanizm adaptacyjny dodatkowo poprawia szacunek wewnętrznego napięcia silnika, zwiększając dokładność zarówno prędkości, jak i położenia. Symulacje komputerowe pokazują, że ten inteligentniejszy obserwator zmniejsza błąd położenia przy średnio-wysokich prędkościach z około 0,9 radiana do około 0,2 radiana oraz skraca czas ustalania się systemu po zmianie obciążenia.
Wygładzanie przekazywania między niskimi a wysokimi prędkościami
Stosowanie dwóch różnych metod estymacji stawia kolejne wyzwanie: jak płynnie przekazać sterowanie między nimi podczas przyspieszania silnika. Proste podejście polega na stopniowym wygaszaniu jednej metody i włączaniu drugiej za pomocą liniowego ważenia, ale to nadal może powodować skoki momentu i prędkości. Autorzy proponują łagodniejszą, sinusoidalną funkcję ważenia. W wybranym paśmie przejściowym system sterowania stopniowo przesuwa zaufanie z metody niskoprędkościowej na obserwator wysokoprędkościowy, podążając za gładką falistą krzywą zamiast ostrym rampowaniem. Ta ulepszona metoda łączenia zauważalnie zmniejsza skoki prędkości i zakłócenia kąta podczas zmiany, redukując błąd kątowy w przejściu i skracając o połowę czas potrzebny na ustabilizowanie błędów.
Co to oznacza dla maszyn w rzeczywistym świecie
Ogólnie rzecz biorąc, połączona strategia — sondowanie silnika przy niskich prędkościach, stosowanie adaptacyjnego obserwatora przy wyższych prędkościach oraz przełączanie między nimi z użyciem płynnego sinusoidalnego ważenia — zapewnia stabilne i dokładne sterowanie w całym zakresie prędkości bez mechanicznych czujników. W symulacjach proponowana metoda utrzymuje niewielkie przeregulowania i błędy ustalone przy jednoczesnym unikaniu uciążliwego drgania (chatteringu), które może powodować hałas, zużycie i dyskomfort. Dla zastosowań codziennych oznacza to, że pojazdy elektryczne, napędy przemysłowe i systemy napędowe mogą stać się bardziej niezawodne, bardziej kompaktowe i tańsze w produkcji, przy zachowaniu precyzyjnej kontroli ruchu bez polegania na kruchych czujnikach montowanych na wale.
Cytowanie: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Słowa kluczowe: sterowanie silnikiem bez czujników, silnik synchroniczny z magnesami trwałymi, obserwator stanu ślizgowego, wstrzykiwanie sygnału o wysokiej częstotliwości, systemy napędowe elektryczne