Clear Sky Science · pl
Wpływ parametrów konstrukcyjnych na przestrzeń roboczą robotów równoległych typu delta oraz optymalizacja ścieżki dla zastosowań w sortowaniu świeżych liści herbaty
Roboty trafiają do fabryki herbaty
Świeże liście herbaty są delikatne: zgniecenie pąka lub stłuczenie liścia obniża jakość naparu. Ręczne sortowanie jest męczące i wolne. W artykule badano, jak szybki, lekki robot przemysłowy typu Delta można dostroić, by poruszał się szybko i precyzyjnie nad taśmami transportującymi liście, jednocześnie obchodził się z nimi delikatnie i niezawodnie.
Dlaczego liście herbaty wymagają specjalnego traktowania
W nowoczesnym przetwórstwie herbaty sortowanie świeżych liści jest kluczowe dla jakości i ceny. Ludzie mają trudności z utrzymaniem tempa i stałości, zwłaszcza podczas długich zmian. Roboty Delta, powszechnie stosowane do szybkiego pakowania, wydają się naturalnym wyborem: są sztywne, dokładne i mogą poruszać się z dużą prędkością. Jednak większość wcześniejszych konstrukcji projektowano pod ogólne przedmioty, takie jak pudełka czy elementy złączne, a nie kruche pąki herbaty ograniczone do wąskiej strefy między dwoma taśmami. „Przestrzeń robocza” robota — trójwymiarowy obszar, do którego może sięgnąć — musi odpowiadać temu wąskiemu rejonowi i realizować specyficzny ruch w kształcie bramki: uchwycić, podnieść, przesunąć i odłożyć, nie uderzając we własne części ani nie chybiając celu.
Jak kształt robota determinuje zasięg
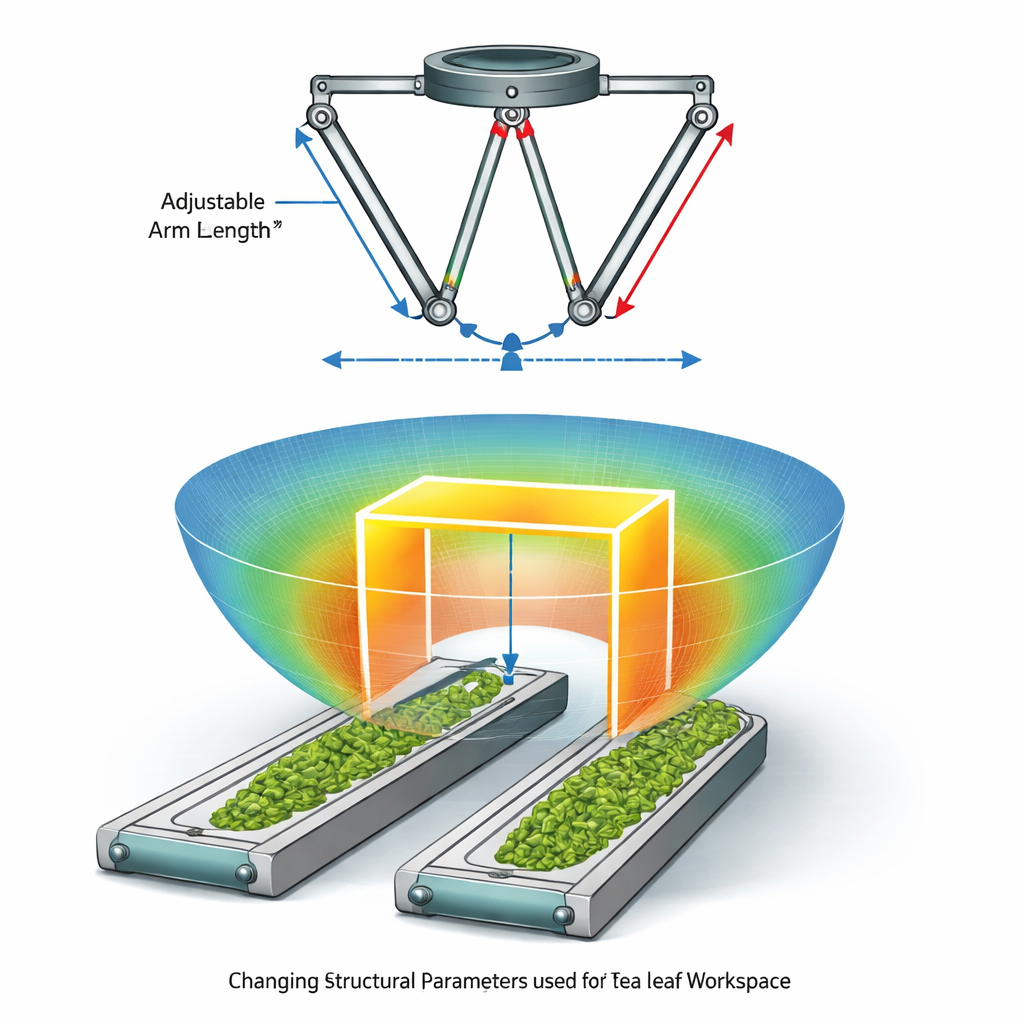
Autorzy zaczynają od szczegółowego opisu matematycznego ruchu robota Delta. Łączą kąty trzech napędzanych stawów z dokładną pozycją małej poruszającej się platformy niosącej przyssawkę. Korzystając zarówno z kinematyki prostej (kąty → pozycja), jak i odwrotnej (pozycja → kąty), definiują każdy punkt, do którego końcówka narzędzia może fizycznie dotrzeć przy ograniczonych bezpiecznych kątach stawów. Zaimplementowane w MATLAB-ie równania pozwalają zasymulować pełną osiągalną objętość robota i wizualizować ją z kilku perspektyw jako barwną, miseczkowatą chmurę punktów. Ta przestrzeń robocza stanowi potem podstawę oceny, czy dana konstrukcja mechaniczna poradzi sobie ze ścieżką sortowania herbaty.
Testowanie wielu projektów w eksperymentach wirtualnych
Zamiast budować wiele fizycznych prototypów, zespół traktuje cztery kluczowe wymiary geometryczne jako „pokrętła projektowe”: długość ramion górnych (L), długość ramion dolnych (l), promień stałego trójkąta podstawy (R) oraz promień poruszającego się trójkąta (r). Wykorzystują plan eksperymentu ortogonalnego, który efektywnie próbuje kombinacje tych czterech parametrów na trzech poziomach, dając dziewięć wirtualnych robotów. Dla każdego program oblicza całkowitą objętość przestrzeni roboczej i pokazuje, jak nakłada się ona na ustandaryzowane pudełko ścieżki w kształcie bramki o wymiarach 200 mm wysokości, 400 mm szerokości i 200 mm głębokości. Dzięki temu badacze widzą nie tylko rozmiar przestrzeni roboczej, ale też, czy faktycznie pokrywa obszar, gdzie poruszają się liście na taśmach.
Które wymiary mają największe znaczenie
Porównując dziewięć symulowanych projektów, badanie ustala ranking wpływu poszczególnych wyborów konstrukcyjnych na użyteczny zasięg. Zdecydowanym zwycięzcą jest długość biernych (dolnych) ramion: dłuższe ramiona dolne znacząco powiększają przestrzeń roboczą. Na drugim miejscu jest długość aktywnych (górnych) ramion, która również rozszerza zakres ruchu, lecz przy nadmiernym wydłużeniu może wprowadzać drgania. Promień podstawy ma umiarkowany wpływ; zbyt szeroka podstawa sprzyja kolizjom ruchomych ramion z ramą, zmniejszając rzeczywiście użyteczną objętość. Promień poruszającej się platformy ma najsłabszy wpływ, jednak mniejsza platforma nieznacznie pomaga, zwalniając przestrzeń dla ruchu ramion. Analizy zakresu i wariancji pokazują, że choć niektóre zestawy parametrów dają największą całkowitą przestrzeń, niekoniecznie pokrywają wąski, bramkowy rejon istotny dla sortowania herbaty.
Konstrukcja dopasowana do linii herbaty
Najbardziej praktyczna konfiguracja nie okazała się tą o największej objętości całkowitej, lecz taką, której przestrzeń robocza dokładnie owija trajektorię w kształcie bramki. Jedna konkretna kombinacja — 250 mm ramion górnych, 400 mm ramion dolnych, promień podstawy 90 mm oraz promień poruszającej się platformy 50 mm — w pełni pokrywa wymaganą ścieżkę między dwoma taśmami, zachowując przy tym kompaktowość i stabilność robota. Przy wysokości roboczej około 325 mm ponad płaszczyzną odniesienia robot osiąga najszerszy użyteczny zakres, wystarczający, by objąć obie taśmy i wykonać cykl uchwyt–podniesienie–przemieszczenie–odłożenie bez wychodzenia poza bezpieczny obszar.
Co to oznacza dla przyszłych fabryk herbaty
Dla osób spoza branży najważniejsza wiadomość jest taka, że niewielkie zmiany w długościach ramion robota i wymiarach platformy mogą przesądzić o tym, czy maszyna imponuje tylko w otwartej przestrzeni, czy też działa niezawodnie na linii produkcyjnej. Kwantyfikując, jak każdy parametr konstrukcyjny kształtuje osiągalną objętość i jej pokrycie realistycznej, bramkowej ścieżki, badanie dostarcza przepisu na projektowanie robotów Delta, które sortują liście herbaty szybko, precyzyjnie i przy minimalnych uszkodzeniach. To samo podejście może poprowadzić projektowanie niestandardowych robotów dla innych produktów spożywczych lub kruchych wyrobów, gdzie prędkość, dokładność i delikatne obchodzenie się muszą iść w parze.
Cytowanie: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Słowa kluczowe: robot delta, sortowanie liści herbaty, przestrzeń robocza robota, pick-and-place, automatyzacja przemysłowa