Clear Sky Science · pl
Opracowanie i ocena systemu pozycjonowania pacjenta z użyciem nawigacji powierzchniowej dla terapii wychwytu neutronów przez bor (BNCT)
Precyzyjniejsze celowanie neutronami w walce z rakiem
Terapia wychwytu neutronów przez bor (BNCT) to obiecująca metoda leczenia nowotworów, która może selektywnie uszkadzać komórki guza, oszczędzając jednocześnie dużą część otaczających tkanek zdrowych. Aby jednak osiągnąć tę precyzję, lekarze muszą ustawić pacjenta dokładnie w odpowiednim miejscu przed stałą wiązką neutronów — często w granicach jednego milimetra. Artykuł opisuje nowy system pozycjonowania sterowany kamerami i robotem, zaprojektowany, by uczynić to delikatne ustawienie szybszym, dokładniejszym i mniej zależnym od wprawy i subiektywnej oceny technika.
Dlaczego pozycjonowanie ma tak duże znaczenie
W przeciwieństwie do wielu współczesnych aparatów radioterapeutycznych, które mogą obracać się wokół pacjenta i modyfikować kształt wiązki promieniowania, BNCT opiera się na ciężkim, stałym źródle neutronów z ograniczonymi możliwościami kierowania wiązką. To pacjent, a nie wiązka, musi zostać ustawiony w precyzyjnie właściwym miejscu. Tradycyjnie personel używa laserów, znaków na skórze i ręcznych przesunięć stołu. Proces ten jest powolny, silnie uzależniony od umiejętności operatora i może pozostawiać drobne błędy pozycji, które zmieniają dawkę otrzymywaną przez guz i pobliskie narządy. W miarę otwierania ośrodków BNCT do leczenia skomplikowanych guzów głowy, szyi i innych trudno dostępnych obszarów, te ograniczenia stają się poważną przeszkodą.
Wysokotechnologiczny asystent: kamery, oprogramowanie i robot
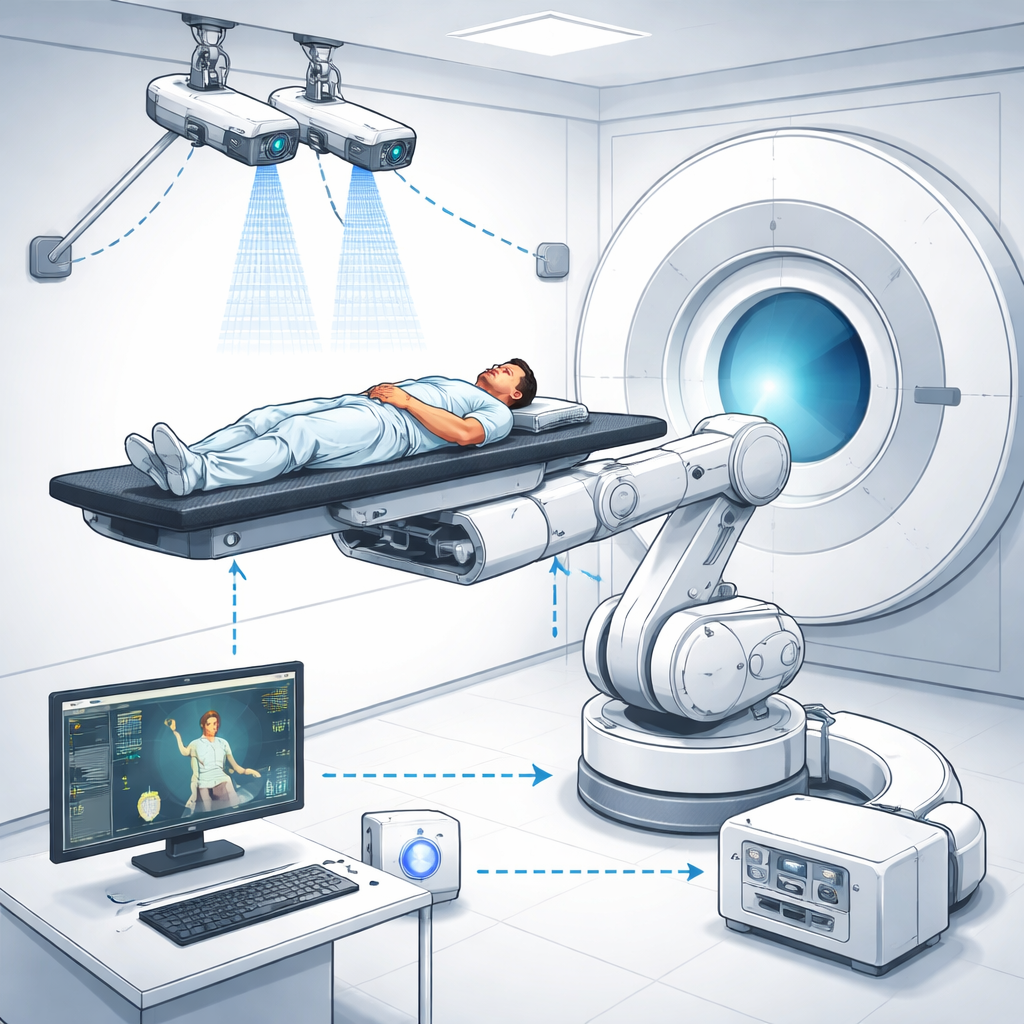
Aby sprostać temu wyzwaniu, zespół badawczy zbudował zintegrowany system Surface-Guided BNCT (SG‑BNCT), łączący trzy główne elementy: specjalistyczny program do planowania leczenia o nazwie NeuMANTA, parę kamer stereoskopowych oraz sześcioczynnościowego robota przemysłowego niosącego stół terapeutyczny. W NeuMANTA lekarze planują leczenie BNCT na obrazach CT, określając dokładny punkt, przez który powinna przechodzić wiązka neutronów, oraz trzy małe punkty odniesienia, czyli markery fiducjalne, na skórze pacjenta. Markery te definiują pozycję pacjenta na obrazach planistycznych i łączą plan z rzeczywistymi współrzędnymi sali zabiegowej za pomocą macierzy przekształceń matematycznych.
Jak kamery 3D widzą i korygują ustawienie
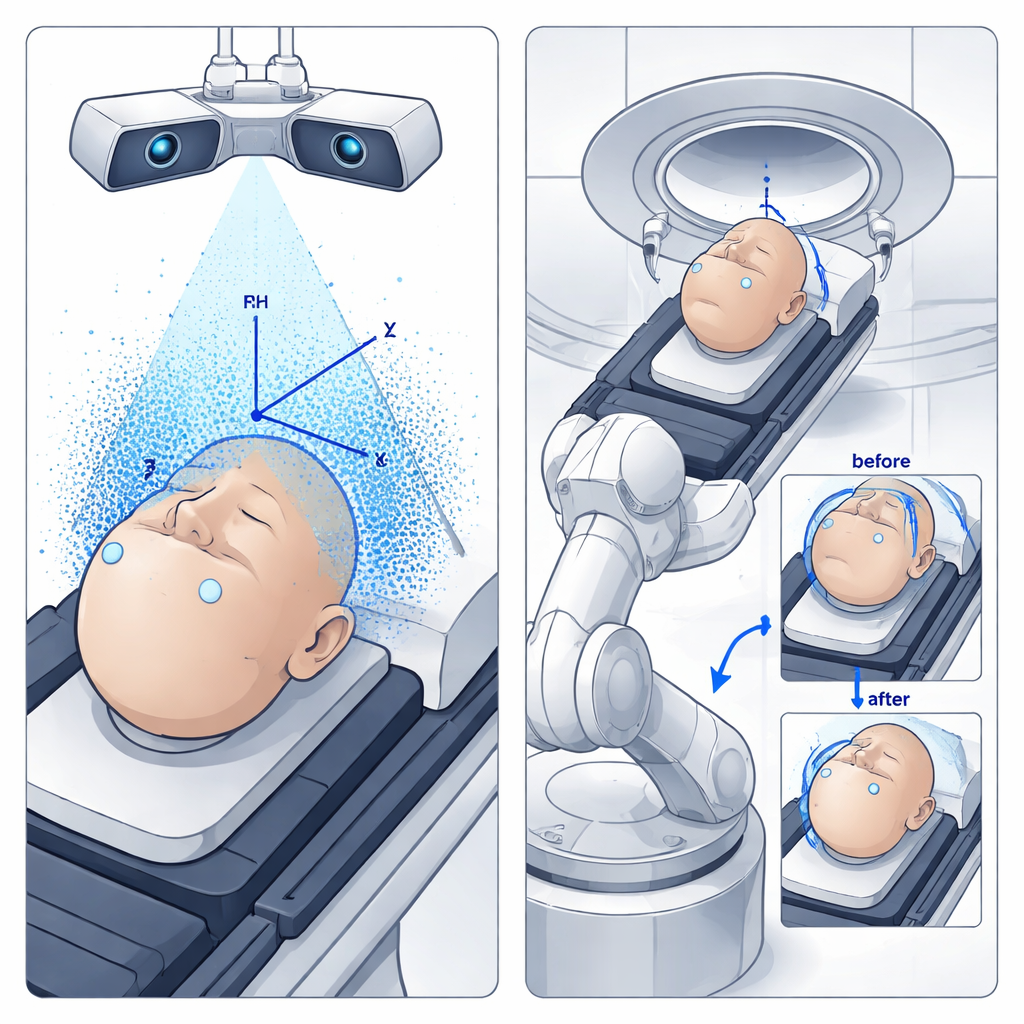
W sali zabiegowej dwie kamery o wysokiej rozdzielczości obserwują pacjenta z różnych kątów, podobnie jak oczy ludzkie. Wykorzystując nowoczesny algorytm wykrywania obiektów (YOLO) wytrenowany na ponad tysiącu obrazów, system szybko lokalizuje te same markery fiducjalne na powierzchni pacjenta. Porównując wygląd każdego markera w widokach z lewej i prawej kamery, komputer rekonstruuje ich pozycje 3D i tworzy szczegółowy „point cloud” powierzchni. Na podstawie trzech niekolinearnych markerów odtwarza układ współrzędnych pacjenta i porównuje go z układem zdefiniowanym w planie leczenia. Każda niezgodność między planowaną a rzeczywistą pozycją jest przekształcana w polecenia przesunięcia i obrotu — sześć stopni swobody — dla robota przemysłowego podtrzymującego stół pacjenta.
Testy z pacjentem‑zastępcą
Zanim zastosowano system u prawdziwych pacjentów, zespół przetestował go na fantomie antropomorficznym — modelu o kształcie człowieka — wyposażonym w markery wewnętrzne i powierzchniowe widoczne zarówno w skanach CT, jak i dla kamer. Stworzono wiele ustawień zabiegowych w NeuMANTA z różnymi kierunkami wiązki, a następnie poproszono system SG‑BNCT o odtworzenie tych planów poprzez automatyczne przesunięcie fantomu do właściwej pozycji. Laser umieszczony w osi otworu wiązki neutronów działał jako substytut właściwej wiązki, dzięki czemu badacze mogli bezpośrednio zmierzyć, o ile końcowy punkt na fantomie odbiegał od zamierzonego celu — zarówno wzdłuż kierunku wiązki (odległość źródło‑skóra), jak i bocznie w płaszczyźnie prostopadłej do wiązki.
Jak blisko system doszedł do celu?
W 24 eksperymentalnych ustawieniach błędy pozycjonowania systemu były zazwyczaj poniżej 1 milimetra w obu kierunkach, przy czym najgorsze jednoprzebiegowe odchylenia sięgały około 2–3 milimetrów wzdłuż osi wiązki. Autorzy przypisali te pozostałe rozbieżności trzem głównym źródłom: grubości warstw obrazów CT, niewielkim niepewnościom kalibracyjnym kamer stereoskopowych oraz drobnym, pikselowym niedokładnościom detekcji markerów przez oprogramowanie. Istotne jest, że system został zaprojektowany do pracy w pętli zamkniętej: wielokrotnie ponownie mierzy pozycje markerów, aktualizuje wyrównanie 3D i wydaje kolejne precyzyjne ruchy robota, aż pozostały błąd spadnie poniżej ustawionego progu. W tych iteracyjnych testach końcowe odchylenia konsekwentnie zmniejszały się do znacznie poniżej 1 milimetra, osiągając precyzję poniżej milimetra zarówno w głębokości, jak i w kierunku bocznym.
Co to oznacza dla pacjentów
Dla pacjentów, którzy mogą odnieść korzyść z BNCT — zwłaszcza tych z guzami w skomplikowanych lub wrażliwych obszarach — ten powierzchniowy, wspomagany robotem system pozycjonowania obiecuje bardziej niezawodne i efektywne leczenia. Poprzez powiązanie oprogramowania do planowania bezpośrednio z kamerami obserwującymi rzeczywistego pacjenta oraz z robotem wykonującym precyzyjne ruchy, metoda zmniejsza zależność od ręcznej kalibracji laserowej i ludzkiego szacowania. Choć obecna wersja jest zbyt wolna do śledzenia ruchu w czasie rzeczywistym i jak dotąd przeprowadzono jedynie testy statyczne, wyniki pokazują, że technologia może rutynowo ustawić pacjenta z dokładnością poniżej milimetra. Przy dalszym zwiększeniu prędkości i wzmocnieniu sprzętu przeciw promieniowaniu podejście to mogłoby stać się praktycznym elementem codziennej bezpieczniejszej i bardziej konsekwentnej terapii BNCT w warunkach klinicznych.
Cytowanie: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Słowa kluczowe: terapia wychwytu neutronów przez bor, pozycjonowanie pacjenta, wizja stereoskopowa, robotyka medyczna, nawigacja powierzchniowa