Clear Sky Science · pl
Dynamic global tracker for online multi camera multi vehicle tracking
Dlaczego inteligentniejsze kamery drogowe mają znaczenie
Każdy, kto utknął w korku lub martwił się o wypadki drogowe, doświadczył ograniczeń dzisiejszych systemów ruchu. Nowoczesne miasta instalują sieci kamer wzdłuż autostrad i na skrzyżowaniach, by obserwować ruch w czasie rzeczywistym. Jednak sprawienie, by kamery współpracowały — czyli płynnie śledziły ten sam samochód z jednego ujęcia do drugiego — okazuje się zaskakująco trudne. W tym badaniu przedstawiono nowy sposób śledzenia pojazdów równocześnie z wielu kamer, obiecujący szybszy i bardziej niezawodny monitoring, który może zwiększyć bezpieczeństwo na drogach i poprawić reagowanie w zarządzaniu ruchem.
Problem dzisiejszego śledzenia ruchu
Tradycyjne systemy traktują każdą kamerę niemal jak odrębny świat. Najpierw wykrywają pojazdy w każdym wideo, potem budują krótkie trajektorie dla każdego samochodu w obrębie widoku pojedynczej kamery. Dopiero po obejrzeniu długich fragmentów zarejestrowanego materiału próbują „zszyć” te trajektorie między kamerami, stosując ciężkie metody klastrowania danych i ręcznie tworzone reguły dotyczące układu dróg i położenia kamer. Ten tryb offline, po fakcie, jest wolny, pochłania dużo mocy obliczeniowej i zawodzi, gdy sceny drogowe się zmieniają, kamery są przemieszczane lub dodawane są nowe punkty widzenia. Ma też problemy, gdy kamery pokazują pojazdy w bardzo różnych rozmiarach i kątach, co może sprawić, że ten sam samochód będzie wyglądał jak dwa zupełnie różne.
Nowe podejście: śledź wszystko w czasie rzeczywistym
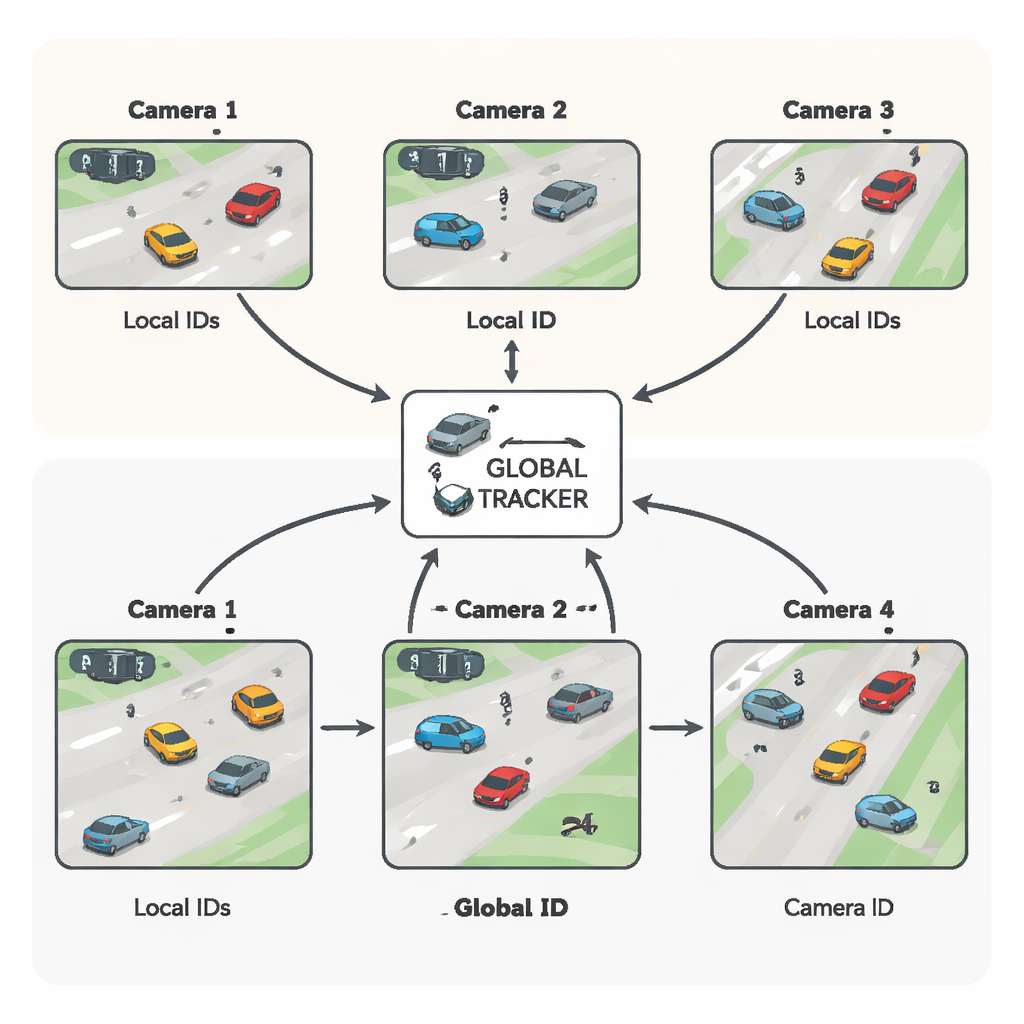
Naukowcy proponują nową ramę nazwaną Dynamic Global Tracking (DGT), zaprojektowaną od podstaw do pracy w czasie rzeczywistym. Zamiast czekać, aż całe wideo zostanie zebrane i dopiero wtedy próbować łączyć trajektorie pojazdów, DGT buduje te powiązania od razu. Każda kamera nadal wykrywa pojazdy i tworzy krótkie, wewnątrzkamerowe trajektorie, ale gdy tylko te trajektorie są aktualizowane, są natychmiast porównywane z trajektoriami z innych kamer. Klasyczny algorytm dopasowujący decyduje, czy dwie trajektorie z różnych ujęć należą do tego samego samochodu. Ten online’owy, krok po kroku proces zastępuje masywne klastrowanie wszystkich poprzednich danych, zmniejszając obciążenie obliczeniowe i umożliwiając nadążanie za ruchem na żywo.
Widzieć ten sam samochód z różnych kątów
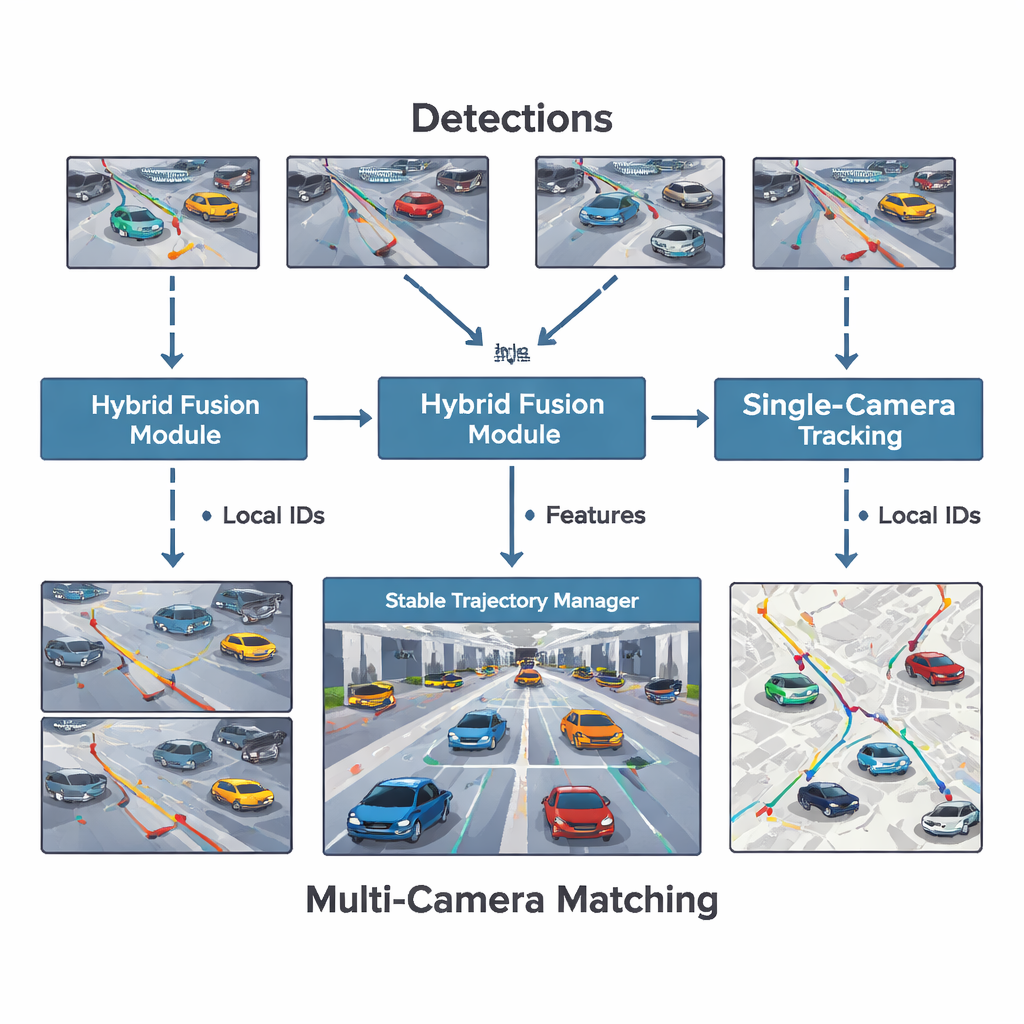
Głównym wyzwaniem jest to, że ten sam pojazd może pojawić się duży i szczegółowy w jednej kamerze, a mały i rozmyty w innej, albo inaczej oświetlony w tunelu niż na otwartej drodze. Aby sobie z tym poradzić, DGT zawiera Hybrydowy Moduł Fuzji, który łączy drobne detale i szerszy kontekst z każdego obrazu. Przetwarza klatki kamer w dwojaki sposób jednocześnie: jedna gałąź koncentruje się na wyraźnych, drobnych detalach, takich jak krawędzie i tekstury, podczas gdy druga skupia się na bardziej globalnych wzorcach i kontekście. System następnie łączy oba te spojrzenia w pojedynczy, stabilny opis wyglądu pojazdu. Testy pokazują, że takie podejście utrzymuje wysokie zaufanie systemu, nawet gdy rozmiar lub jakość obrazu samochodu znacznie się różnią między kamerami.
Utrzymywanie trajektorii stabilnych i wiarygodnych
DGT wprowadza także Menedżera Stabilnych Trajektorii, działającego jak centrum kontroli jakości decyzji śledzenia. Filtruje niepewne wykrycia, zarządza tym, jak długo samochód może zniknąć za innym pojazdem lub przeszkodą, zanim zostanie uznany za „zniknięty”, oraz usuwa obiekty, które nie poruszają się w czasie, takie jak zaparkowane samochody czy bariery przydrożne. Starannie dobrane progi czasowe i progowe ruchu pozwalają systemowi odróżnić samochód krótkotrwale ukryty w tunelu od tego, który faktycznie opuścił scenę lub przeszedł do innej kamery. W połączeniu te zasady pomagają utrzymać spójne identyfikatory dla każdego pojazdu, redukując nagłe skoki, utraty czy błędne łączenia trajektorii.
Co to oznacza dla codziennych dróg
W testach na dużą skalę, zarówno w tunelu autostradowym w Chinach, jak i na ruchliwym skrzyżowaniu w amerykańskim mieście, DGT osiągnął wysoką dokładność, działając wystarczająco szybko do użycia w czasie rzeczywistym. W przeciwieństwie do wielu wcześniejszych systemów dostrojonych do jednego typu sceny, DGT poradził sobie zarówno z widokami nakładającymi się, jak i nienakładającymi się bez potrzeby szczegółowego ręcznego wprowadzania informacji o układzie dróg. Dla kierowców i mieszkańców miast taki solidny, elastyczny system śledzenia oznacza, że centra zarządzania ruchem mogłyby szybciej reagować na wypadki, zatłoczenie czy nietypowe zachowania, korzystając z jaśniejszego i bardziej ciągłego obrazu przemieszczania się pojazdów przez sieć dróg i kamer.
Cytowanie: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Słowa kluczowe: śledzenie pojazdów z wielu kamer, inteligentne systemy transportowe, monitorowanie ruchu w czasie rzeczywistym, widzenie komputerowe, inteligentne miasta