Clear Sky Science · pl
Eksploracja głębin oceanicznych: odkrywanie ukrytych skarbów za pomocą IoT i zespołowego hybrydowego modelu głębokiego uczenia
Dlaczego badanie dna morskiego przechodzi na wysokie technologie
Głębiny oceanu i warstwy gruntu pod nim skrywają kable, rurociągi, starożytne ruiny i delikatne ekosystemy. Tymczasem mętna woda, wirujący piasek i słabe sygnały sprawiają, że zaskakująco trudno jest zobaczyć, co tam się znajduje. W artykule opisano nowy sposób łączenia różnych typów czujników z sztuczną inteligencją, dzięki któremu roboty podwodne i systemy monitorujące mogą wykrywać ważne obiekty dokładniej, szybciej i przy mniejszym zużyciu energii. Praca może pomóc chronić życie morskie, zabezpieczać infrastrukturę i otworzyć nowe możliwości eksploracji.
Wiele czujników, jeden wspólny obraz głębin
Dzisiejsze urządzenia do wykrywania pod wodą zwykle opierają się na jednym zmysle: impulsie sonaru, kamerze wideo lub jednym typie czujnika gruntu. Każde działa dobrze w idealnych warunkach, ale zawodzą, gdy woda zamula, światła brak, a hałas się pojawia. Badacze wyobrażają sobie zamiast tego ocean jako przestrzeń obserwowaną przez Internet Rzeczy: małe, sieciowe urządzenia, które słyszą, patrzą i wyczuwają na różne sposoby. Ich system łączy dane z kamer, radaru penetrującego grunt, sejsmicznych czujników drgań, sond termicznych i detektorów elektromagnetycznych w jeden wspólny strumień do analizy. Poprzez zintegrowanie tych widoków system potrafi rozpoznać obiekt nawet wtedy, gdy jeden czujnik jest zdezorientowany przez muł, pęcherzyki czy odbicia. 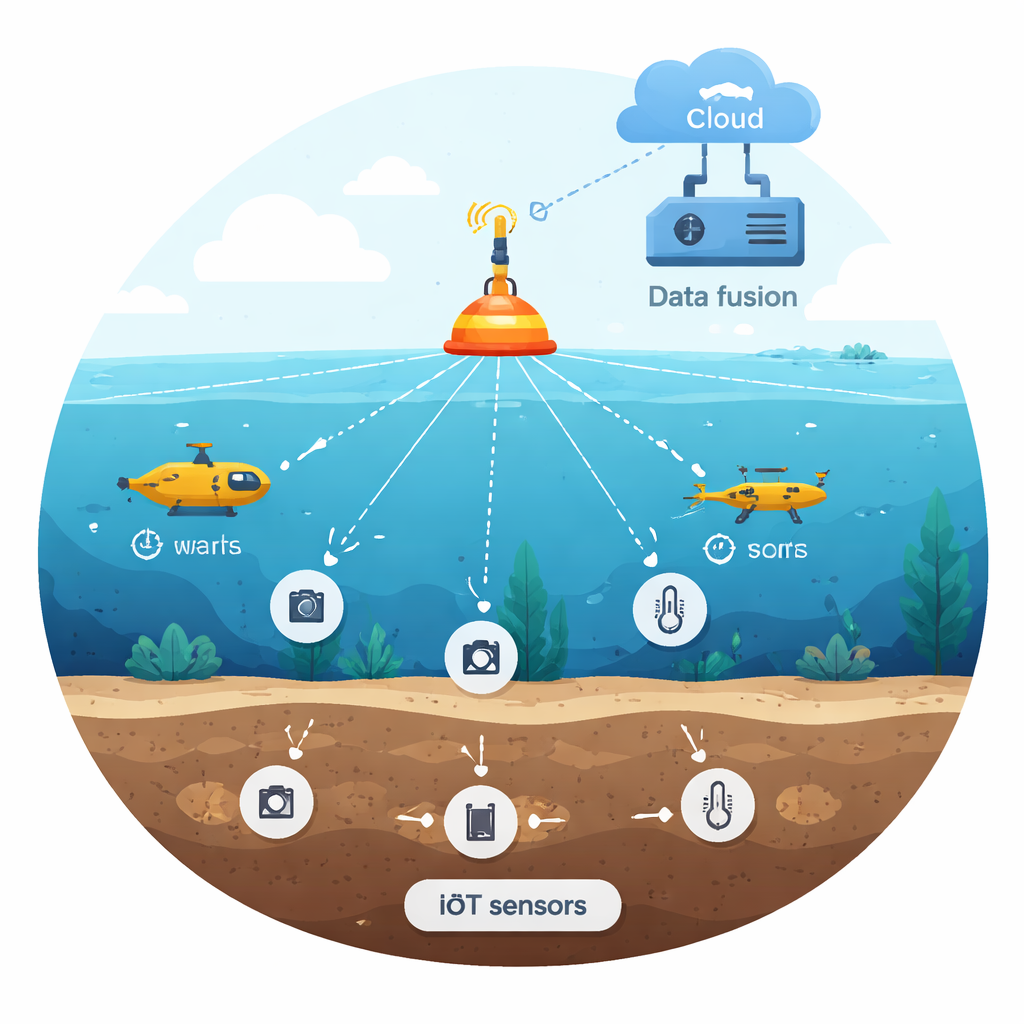
Czyszczenie zabałaganionych sygnałów zanim trafią do „mózgu”
Surowe dane zbierane pod wodą są dalekie od ideału. Pełne są losowych pików, luk i nietypowych odczytów powodowanych przez zmieniające się prądy, poruszające się zwierzęta i zakłócenia elektroniczne. Zanim jakikolwiek inteligentny algorytm podejmie decyzję, autorzy przepuszczają te dane przez staranny proces oczyszczania. Używają filtrów medianowych, by wygładzić nagłe szumy bez rozmywania prawdziwych cech, kontroli statystycznej do wykrywania i usuwania wartości odstających oraz synchronizacji, aby odczyty z różnych urządzeń były zsynchronizowane w czasie. Skalują też wartości, by silny czujnik nie zagłuszał słabszych, przekształcają jednowymiarowe ślady radarowe w obrazy i stosują nowoczesne techniki redukcji wymiarowości, aby skurczyć setki pomiarów do mniejszego, bardziej informatywnego zbioru. Wszystko to ma na celu, by system uczący widział wyraźny obraz zamiast chaotycznego rozmycia.
Hybrydowy silnik uczący się, który dostrzega wzorce i podejmuje decyzje
W sercu podejścia znajduje się to, co autorzy nazywają Zespołowym Hybrydowym Uczeniem Głębokim (EDHL). Składa się ono z dwóch głównych części o uzupełniających się rolach. Po pierwsze, sieć neuronowa w stylu Inception działa jak „oczy”, skanując obrazy z czujników na kilku skalach jednocześnie, aby wychwycić zarówno drobne szczegóły, jak kabel, jak i większe formy, jak odsłonięcie skalne. Z tego generuje bogate opisowe wektory każdej sceny. Po drugie, klasyfikator typu gradiencing boosting pełni rolę „komisji decyzyjnej”. Buduje wiele małych drzew decyzyjnych, które nawzajem korygują swoje błędy, stopniowo dopracowując właściwą odpowiedź dotyczącą obecnego obiektu. Etap selekcji cech wybiera tylko najbardziej informacyjne sygnały, co redukuje pamięć i przyspiesza działanie finalnego systemu bez porzucania kluczowych informacji. 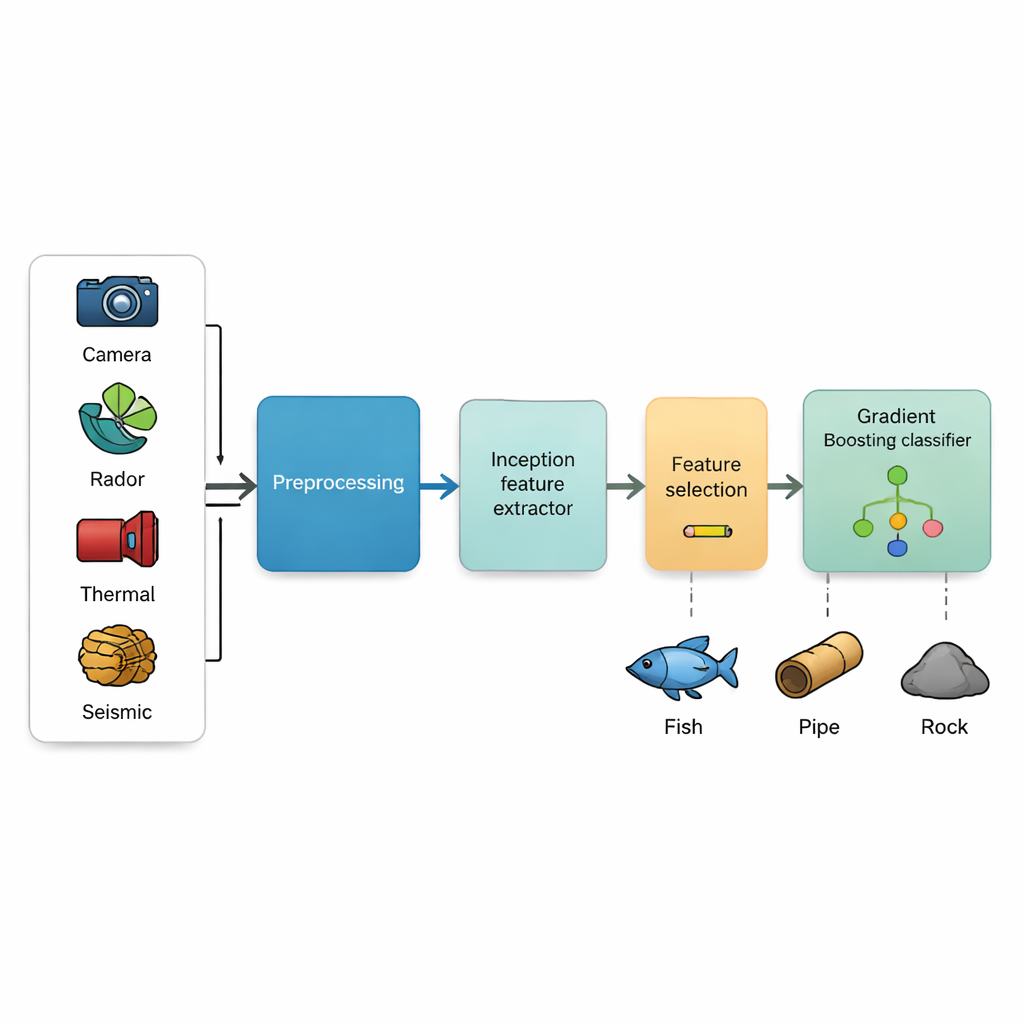
Testy systemu
Aby sprawdzić, czy ich projekt działa w praktyce, zespół wytrenował i ocenił go, używając dużego publicznego zbioru obrazów podwodnych, obejmującego ryby, koralowce, gąbki, wodorosty, muszle, skorupiaki i inne sceny dna morskiego. Porównali wiele wariantów czyszczenia danych i selekcji cech oraz zestawili swój model z dobrze znanymi systemami głębokiego uczenia, takimi jak klasyczne sieci konwolucyjne, ResNet, DenseNet, EfficientNet, sieci kapsułowe, a nawet modele oparte na transformerach. Konfiguracja EDHL, zwłaszcza w połączeniu ze starannym usuwaniem szumów i selekcją cech opartą na korelacjach, osiągnęła trafność powyżej 98%, z dużo mniejszą liczbą fałszywych alarmów i przegapionych obiektów niż rywale. Co ważne, utrzymała wysoką skuteczność działając na umiarkowanym sprzęcie podobnym do tego, który mógłby być używany na urządzeniach brzegowych, a nie tylko na potężnych serwerach laboratoryjnych.
Co to oznacza dla przyszłej eksploracji oceanów
Dla osób niebędących specjalistami kluczowa wiadomość jest taka, że autorzy zbudowali mądrzejszy system „widzieć‑i‑myśleć” dla świata podwodnego. Łącząc różnorodne czujniki IoT z hybrydowym silnikiem uczącym się, pokazują, że można bardzo niezawodnie wykrywać i klasyfikować obiekty na dnie morskim bez potrzeby masywnych komputerów czy idealnych warunków obserwacji. W przyszłości taka technologia może pomóc flotom robotów podwodnych mapować dno, monitorować delikatne siedliska, śledzić zanieczyszczenia i inspekcjonować zakopane elementy infrastruktury z mniejszą liczbą błędów i niższym zużyciem energii. Przekształca to chaotyczne, nieprzyjazne środowisko głębin w miejsce, gdzie cyfrowe zmysły wreszcie potrafią zobaczyć na tyle jasno, by odsłonić ukryte skarby.
Cytowanie: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Słowa kluczowe: wykrywanie obiektów podwodnych, czujniki IoT, głębokie uczenie, eksploracja morska, sensoryka multimodalna