Clear Sky Science · pl
Wykrywanie stanu ściany roboczej w kopalni węgla na podstawie YOLOv8-EST
Mądrzejsze oczy pod ziemią
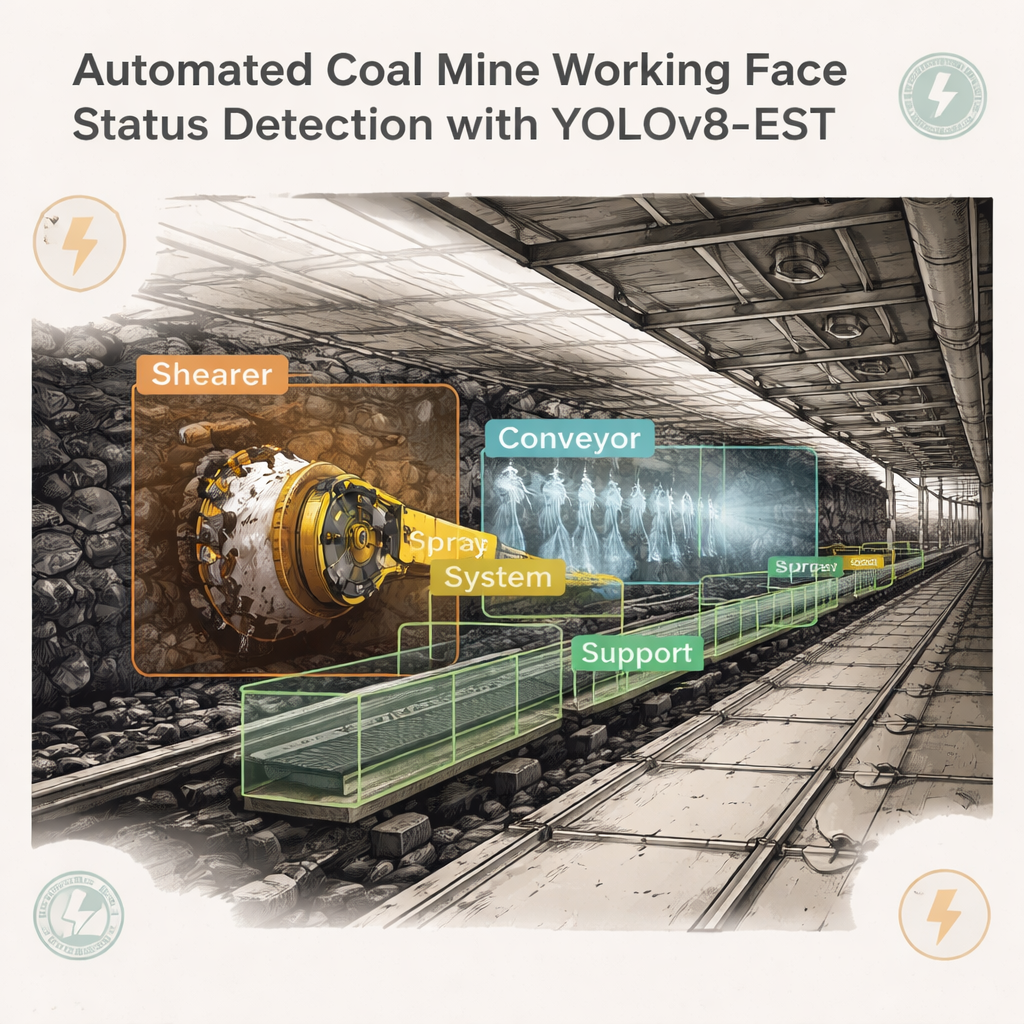
Nowoczesne kopalnie węgla są wypełnione potężnymi maszynami pracującymi w ciemnych, zakurzonych chodnikach, gdzie widoczność człowieka jest ograniczona, a marginesy bezpieczeństwa niewielkie. W tym badaniu przedstawiono nowy system sztucznej inteligencji (AI) o nazwie YOLOv8-EST, który pomaga kopalniom nieustannie „obserwować” ścianę roboczą — obszar, w którym węgiel jest aktualnie skrawany — i automatycznie oceniać, czy kluczowe maszyny działają prawidłowo. Dzięki szybkiemu i dokładnemu działaniu na ograniczonych zasobach komputerów na miejscu, system ma na celu poprawę bezpieczeństwa i efektywności bez konieczności stosowania szeregu wysokowydajnych serwerów.
Dlaczego obserwacja ściany roboczej ma znaczenie
Chiny są największym producentem węgla na świecie, a ich kopalnie stoją przed wyzwaniem zwiększenia bezpieczeństwa, czystości i efektywności. Na w pełni zmechanizowanej ścianie roboczej obracający się bęben tnący oddziela węgiel od pokładu, podczas gdy zgarniacz i przenośniki taśmowe odprowadzają materiał, a systemy zraszające tłumią kurz. Jeśli któryś z tych elementów zawiedzie lub zachowa się nietypowo, produkcja może spaść, a ryzyko wypadków wzrasta. Tradycyjny nadzór opiera się w dużej mierze na doświadczeniu pracowników i prostych czujnikach, które zawodzą w warunkach słabego oświetlenia, unoszącego się kurzu, olśnienia i częstych zasłonięć przez poruszające się urządzenia. Autorzy definiują „wykrywanie stanu ściany roboczej” jako identyfikację w czasie rzeczywistym stanów normalnych i nieprawidłowych tych kluczowych komponentów, wykorzystując wyłącznie obrazy wideo — atrakcyjna ścieżka prowadząca do prawdziwie inteligentnych kopalni.
Ograniczenia istniejącego widzenia AI w kopalniach
W ostatnich latach nastąpił gwałtowny wzrost sukcesów w detekcji obiektów opartych na AI, zwłaszcza dzięki szybkim systemom z rodziny YOLO (You Only Look Once). Modele te potrafią w ułamku sekundy wykrywać i oznaczać wiele obiektów na obrazie. Jednak większość poprawy dokładności osiągnięto poprzez pogłębianie i rozbudowę sieci, co wymaga większej mocy obliczeniowej, niż zwykle dostępna jest na ścianie wydobywczej. Alternatywne detektory, takie jak Faster R-CNN, RetinaNet, EfficientDet czy systemy oparte na transformatorach, mogą być bardzo dokładne, ale często są zbyt wolne lub zbyt zasobożerne do pracy w surowych i dynamicznych warunkach pod ziemią. Ponadto standardowe modele nie są dostosowane do specyficznych problemów wizualnych w kopalniach — ekstremalnego kontrastu, wirującego kurzu, niepełnych widoków maszyn i ciągle zmieniających się teł.
Smukły, lecz wydajny silnik detekcji
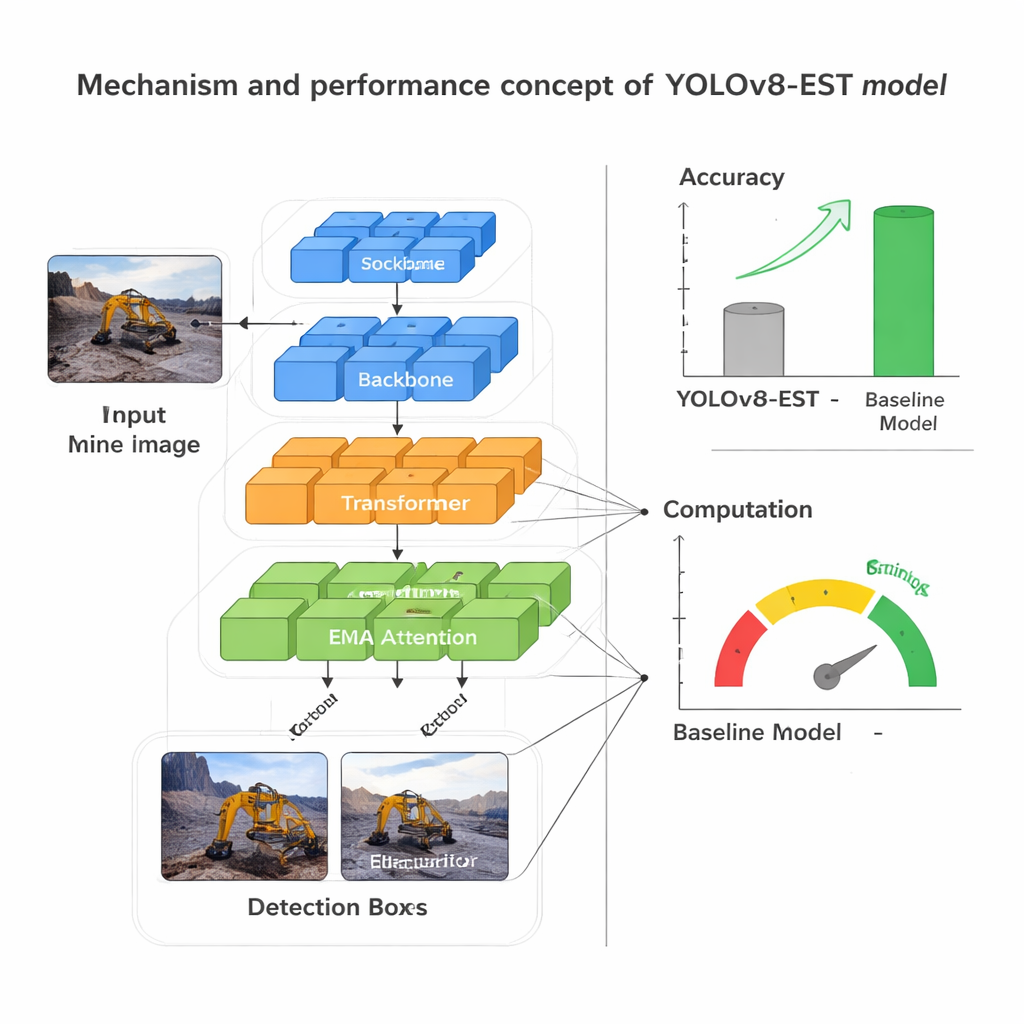
Aby sprostać tym ograniczeniom, badacze oparli się na YOLOv8, nowoczesnym detektorze czasu rzeczywistego, i przeprojektowali go specjalnie pod górnictwo węgla, tworząc YOLOv8-EST. Główną ideą jest dodanie inteligentniejszych elementów przetwarzania cech bez nadmiernego zwiększania rozmiaru modelu. Najpierw wstawili bloki Swin Transformer — moduły wykorzystujące mechanizm uwagi w małych oknach obrazu i przesuniętych oknach — aby uchwycić zarówno lokalne detale, jak i dłuższe zależności, takie jak kształt linii przenośnika czy zarys korpusu skrawarki. Po drugie, poprawili rozumienie relacji przestrzennych, generując względne kodowania pozycji za pomocą małej głębokiej sieci zamiast prostych formuł liniowych, co pomaga na przykład ocenić, czy pióropusz zraszania jest prawidłowo wyrównany względem bębna tnącego. Po trzecie, wprowadzili zmodyfikowaną funkcję aktywacji nazwaną GELUS, matematycznie dostrojoną do płynnej i wydajnej reakcji na rodzaje zaszumionych, niskokontrastowych sygnałów typowych dla obrazów z kopalni, co zmniejsza obliczenia przy zachowaniu stabilności uczenia. Wreszcie moduł uwagi EMA wykorzystuje strategię wykładniczej średniej ruchomej do łączenia bieżących i przeszłych informacji cechowych, pomagając sieci skupić się na naprawdę istotnych obszarach i stłumić hałaśliwe, migające tła.
Testy systemu
Zespół zebrał dedykowany zbiór obrazów ze zmechanizowanej ściany roboczej, nazwany zbiorem CM, zawierający 10 862 zdjęć. Sceny obejmują korpus maszyny, bęben tnący, zgarniacz, przenośnik taśmowy i system zraszania w różnych warunkach oświetleniowych i zapylenia. Dane podzielono na podzbiory treningowe, walidacyjne i testowe, a także pogrupowano obrazy według warunków: słabe oświetlenie/wysokie zapylenie, średnie oraz normalne, aby sprawdzić odporność. Korzystając ze standardowych miar jakości — precyzji, czułości i średniej precyzji (mAP) — porównano YOLOv8-EST z lżejszymi modelami takimi jak YOLOv3-tiny i SSD-MobileNetV2, mainstreamowymi YOLOv5 i YOLOv8, cięższymi detektorami dwuetapowymi jak Faster R-CNN i RetinaNet oraz projektami opartymi na transformatorach, w tym DETR i RT-DETR. W tych testach YOLOv8-EST osiągnął najlepszy balans: około 98% precyzji i czułości oraz bardzo wysokie mAP, przy jednoczesnym zachowaniu kompaktowości modelu umożliwiającej pracę w czasie rzeczywistym na jednej przemysłowej karcie graficznej.
Co to oznacza dla bezpieczeństwa kopalni
Dla osób niezaznajomionych z tematem, kluczowy wniosek jest taki, że badanie przekształca surowe, zamglone wideo z podziemia w wiarygodne, automatyczne raporty stanu krytycznego sprzętu górniczego. Zamiast żądać od pracowników oglądania przyciemnionych ekranów pełnych kurzu i rozmyć ruchu, YOLOv8-EST może sygnalizować, kiedy przenośnik przestał działać, bęben nie znajduje się tam, gdzie powinien, lub system zraszający jest nieaktywny — i robi to z niemal ludzką dokładnością, przez całą dobę. Dzięki starannemu dostosowaniu nowoczesnych technik AI do efektywnej pracy bezpośrednio na ścianie wydobywczej — zamiast wyłącznie w odległych centrach danych — system oferuje praktyczną drogę do bezpieczniejszej, bardziej stabilnej i inteligentniejszej produkcji węgla.
Cytowanie: Wang, H., Wu, G., Yang, Q. et al. Working face status detection in coal mine based on YOLOv8-EST. Sci Rep 16, 7787 (2026). https://doi.org/10.1038/s41598-026-35452-2
Słowa kluczowe: bezpieczeństwo kopalni węgla, detekcja obiektów, widzenie komputerowe, uczenie głębokie, automatyzacja przemysłowa