Clear Sky Science · pl
Regulacja w trybie ślizgowym oparta na algorytmie super-twisting dla deskryptorowych systemów T-S typu fuzzy
Sprawianie, by złożone systemy zachowywały się przewidywalnie
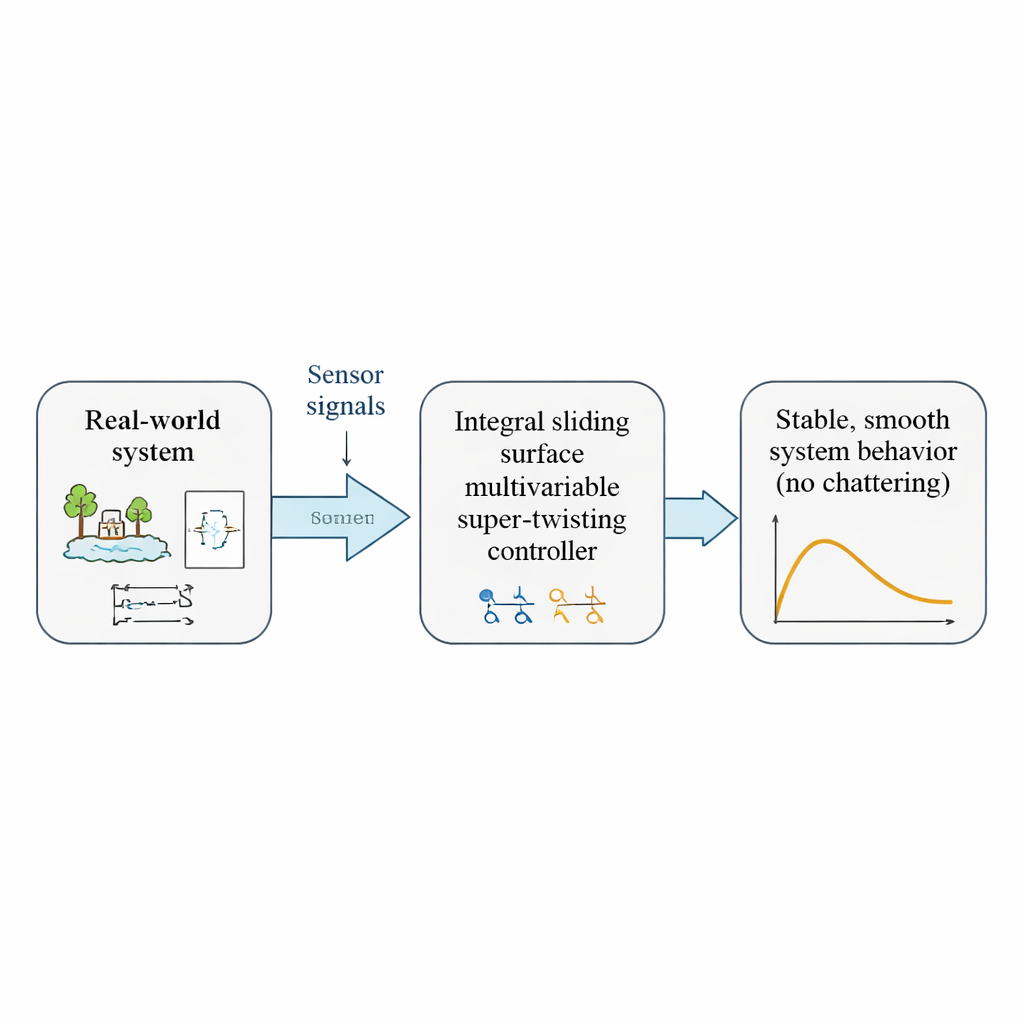
Od zarządzania populacjami ryb po utrzymanie stabilności sieci energetycznych i układów elektronicznych — wiele rzeczywistych systemów zachowuje się w złożony, nieliniowy sposób. Inżynierowie stosują zaawansowane algorytmy sterowania, aby utrzymać takie systemy w bezpiecznym i efektywnym stanie, nawet gdy są one narażone na zaburzenia i niepewność. W artykule przedstawiono nową strategię sterowania, która łagodniej ujarzmia te niepokorne układy, unikając ostrego, szybkiego przełączania mogącego uszkodzić sprzęt i pogorszyć działanie.
Dlaczego niektóre systemy trudno kontrolować
Wiele praktycznych systemów opisują nie tylko równania określające zmiany w czasie, lecz także algebraiczne ograniczenia, które muszą być spełnione w każdym momencie. Tzw. systemy deskryptorowe występują w ekonomii, sieciach energetycznych, układach mechanicznych i modelach biologicznych. Aby poradzić sobie z ich nieliniowym zachowaniem, badacze często sięgają po modele Takagi–Sugeno (T-S) typu fuzzy, które przedstawiają złożony system jako mieszankę prostszych części liniowych działających w różnych obszarach pracy. Choć potężne, podejście to od dawna napotykało na techniczny problem: większość metod sterowania zakładała wcześniejszą znajomość zmian funkcji przynależności fuzzy w czasie, chociaż te zmiany zależą w rzeczywistości od nieznanej przyszłej akcji systemu i regulatora.
Bardziej płynny sposób odpornego sterowania
Regulacja w trybie ślizgowym to popularna metoda odpornego sterowania, znana z umiejętności szybko sprowadzać system na pożądaną trajektorię i utrzymywać go tam mimo zaburzeń. Osiąga to przez przełączanie sygnału sterującego w sposób przeciwdziałający niepewnościom. Jednak szybkie przełączanie może powodować „drgania” (chattering) — wysokoczęstotliwościowe oscylacje niepożądane lub wręcz szkodliwe w układach mechanicznych i elektrycznych. Algorytm super-twisting, będący zaawansowaną wersją regulacji w trybie ślizgowym, ukrywa przełączanie wewnątrz procesu wewnętrznego, generując ciągły sygnał sterujący, który zachowuje odporność przy jednoczesnym zmniejszeniu chatteringu. Do tej pory technika ta była stosowana głównie w systemach jednokanałowych lub wymagała dekompozycji systemów wielokanałowych na wiele oddzielnych regulatorów, co jest obciążające obliczeniowo.
Nowa powierzchnia ślizgowa bez ukrytych założeń
Pierwszym kluczowym wkładem autorów jest nowy rodzaj „całkowej” powierzchni ślizgowej zaprojektowanej specjalnie dla deskryptorowych systemów T-S typu fuzzy. Mówiąc prościej, powierzchnia ta to warunek matematyczny uwzględniający zarówno bieżące, jak i zgromadzone w przeszłości zachowanie systemu. Poprzez sprytne skonstruowanie tej powierzchni autorzy pokazują, że mogą zagwarantować pożądane zachowanie systemu, gdy ten znajdzie się na tej powierzchni, bez konieczności wcześniejszego określania ograniczeń dotyczących zmian funkcji przynależności fuzzy. To usuwa restrykcyjne założenie, które ograniczało wcześniejsze metody. Analiza wykorzystuje starannie dobrane funkcje przypominające energię, aby udowodnić, że zachowanie systemu na powierzchni ślizgowej pozostaje stabilne w czasie.
Wielowymiarowy regulator super-twisting
W oparciu o tę powierzchnię ślizgową artykuł rozwija wielowymiarową wersję algorytmu super-twisting. Zamiast projektować jeden regulator na wejście lub na zmienną ślizgową, metoda traktuje je wszystkie łącznie w formie macierzowej. Sprawia to, że rozwiązanie jest lepiej dopasowane do systemów, w których różne stany są silnie sprzężone, takich jak współdziałające gatunki w ekosystemie czy prądy i napięcia w układzie. Autorzy wyprowadzają warunki doboru wzmocnień regulatora tak, aby stany systemu natychmiast osiągnęły powierzchnię ślizgową, a następnie zbiegały w skończonym czasie. Ponieważ sygnał sterujący jest ciągły zamiast ostro przełączanego, chattering jest tłumiony z założenia, przy zachowaniu odporności na zaburzenia.
Dowód koncepcji w biologii i elektronice
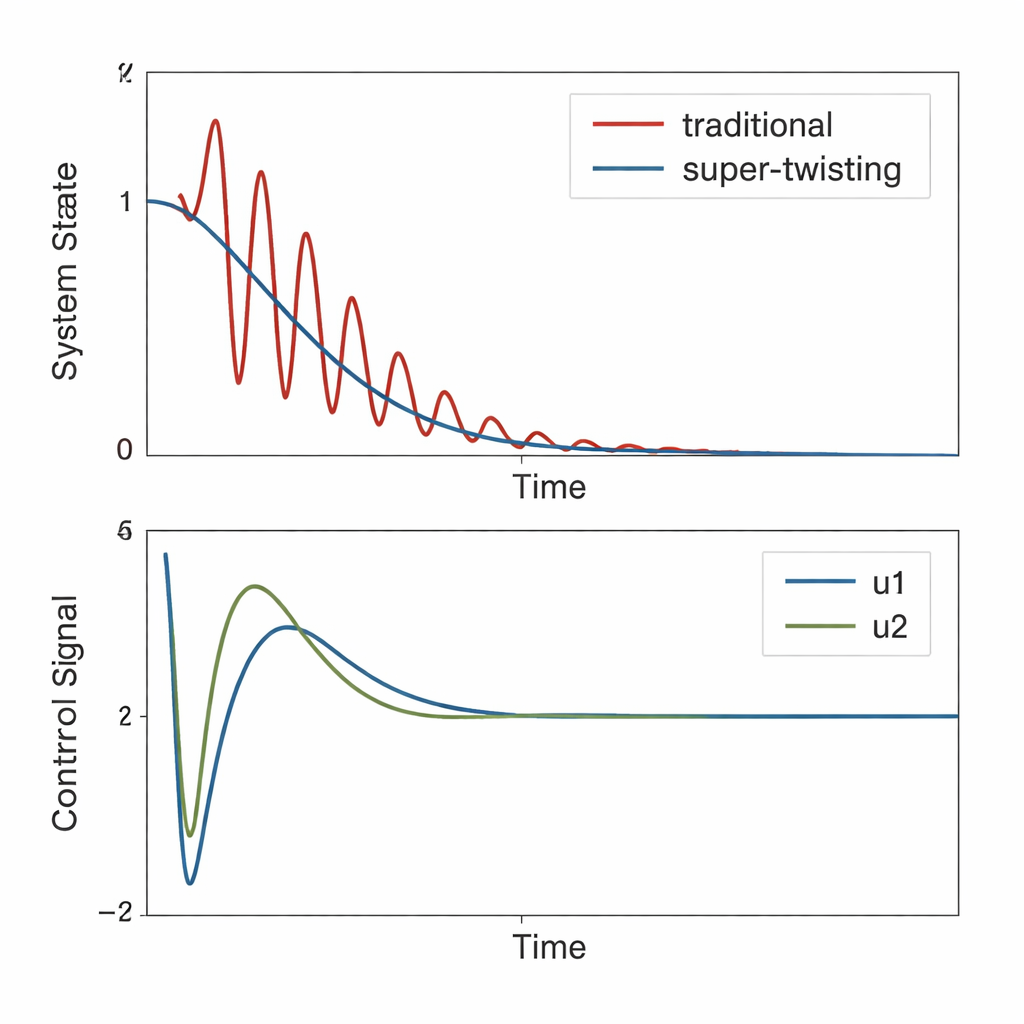
Aby wykazać praktyczność swojej metody, autorzy zastosowali ją do dwóch różnych nieliniowych systemów deskryptorowych. Pierwszy modeluje scenariusz bioekonomiczny obejmujący populacje niedojrzałe i dojrzałe gatunku oraz zmienną opisującą zdolność reprodukcyjną i działania zarządcze, takie jak połowy i regulacje. Drugi przykład to nieliniowy obwód z diodą tunelową, klasyczny poligon doświadczalny w elektronice. W obu przypadkach symulacje pokazują, że proponowany regulator szybko stabilizuje stany systemu i utrzymuje zmienne ślizgowe blisko zera, co wskazuje na precyzyjne śledzenie pożądanego zachowania. W porównaniu z tradycyjnymi regulatorami w trybie ślizgowym, nowe podejście znacząco redukuje oscylacje zarówno w odpowiedzi systemu, jak i w sygnałach sterujących.
Co to oznacza w praktyce
Dla osób niebędących ekspertami główne przesłanie jest takie, że praca ta oferuje sposób utrzymania złożonych, ograniczonych i niepewnych systemów pod kontrolą bez gwałtownego przełączania, które nękało niektóre metody odporne. Łącząc modelowanie fuzzy, całkową powierzchnię ślizgową i wielowymiarowy algorytm super-twisting, autorzy projektują regulatory, które są zarówno matematycznie gwarantowane jako stabilne, jak i praktycznie płynniejsze w działaniu. Może to przynieść korzyści w zastosowaniach od zarządzania zasobami ekologicznymi po zaawansowaną elektronikę mocy i systemy sterowania w sieci, szczególnie gdy przyszłe prace rozwiną te idee w kontekście cyberbezpieczeństwa, gdzie komunikacja może być zakłócana przez ataki.
Cytowanie: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Słowa kluczowe: regulacja w trybie ślizgowym, systemy fuzzy, regulacja odporna, dynamiczne nieliniowości, algorytm super-twisting