Clear Sky Science · pl
Odporny adaptacyjny regulator referencyjny modelu dla manipulatora planarnego 3-DOF
Sprytniejsze ramiona robotów do trudniejszych zadań
Fabryczne ramiona robotyczne są niezwykle szybkie i precyzyjne, ale ich wydajność może spadać, gdy rzeczywistość przestaje być przewidywalna — ładunki się zmieniają, części są umieszczane nieco inaczej albo nieoczekiwane siły szarpią ramię. Artykuł bada nowe podejście, które utrzymuje typowe, trzyprzegubowe ramię robotyczne w dokładności i stabilności nawet wtedy, gdy jego zachowanie trudno jest dokładnie zamodelować i gdy występują silne zakłócenia, czyniąc roboty bardziej niezawodnymi partnerami na hali produkcyjnej.
Dlaczego trzy przeguby mają znaczenie w rzeczywistych fabrykach
Badanie koncentruje się na trójczłonowym robocie planarnym: trzech sztywnych odcinkach połączonych przegubami obrotowymi, poruszających się w płaszczyźnie. Pomimo pozornej prostoty, układ ten stanowi trzon wielu zadań przenoszenia i układania, linii pakowania i systemów montażowych. Problem polega na tym, że ruch jednego przegubu silnie wpływa na pozostałe, a równania opisujące ruch ramienia są silnie nieliniowe i mocno sprzężone. Tradycyjne regulatory działają dobrze, gdy wszystko jest znane i przewidywalne, ale mają trudności, gdy zmienia się ładunek roboczy, tarcie lub masa są źle zamodelowane, albo gdy zewnętrzne zakłócenia odprowadzają ramię z kursu.
Rozkład złożonego ruchu na prostsze elementy
Aby okiełznać tę złożoność, autorzy najpierw wyprowadzają szczegółowy model matematyczny ruchu robota, uwzględniający, jak masy członów, kąty przegubów i grawitacja łączą się, by wywołać ruch. Następnie wprowadzają kluczowe uproszczenie: strategię „rozsprzężenia”. Zamiast traktować robota jako jedno splecione, trójprzegubowe ciało, każdy przegub jest modelowany tak, jakby jego przyspieszenie zależało głównie od własnego momentu napędowego i prędkości. Pozostałe efekty — takie jak interakcje między przegubami, człony grawitacyjne i inne trudne do modelowania wpływy — są zebrane razem i traktowane jako niepewności. To rozsprzężenie pozwala podzielić problem sterowania na trzy mniejsze, łatwiejsze do opanowania podsystemy, po jednym dla każdego przegubu, przy jednoczesnym uznaniu, że rzeczywisty system jest pod spodem złożony. 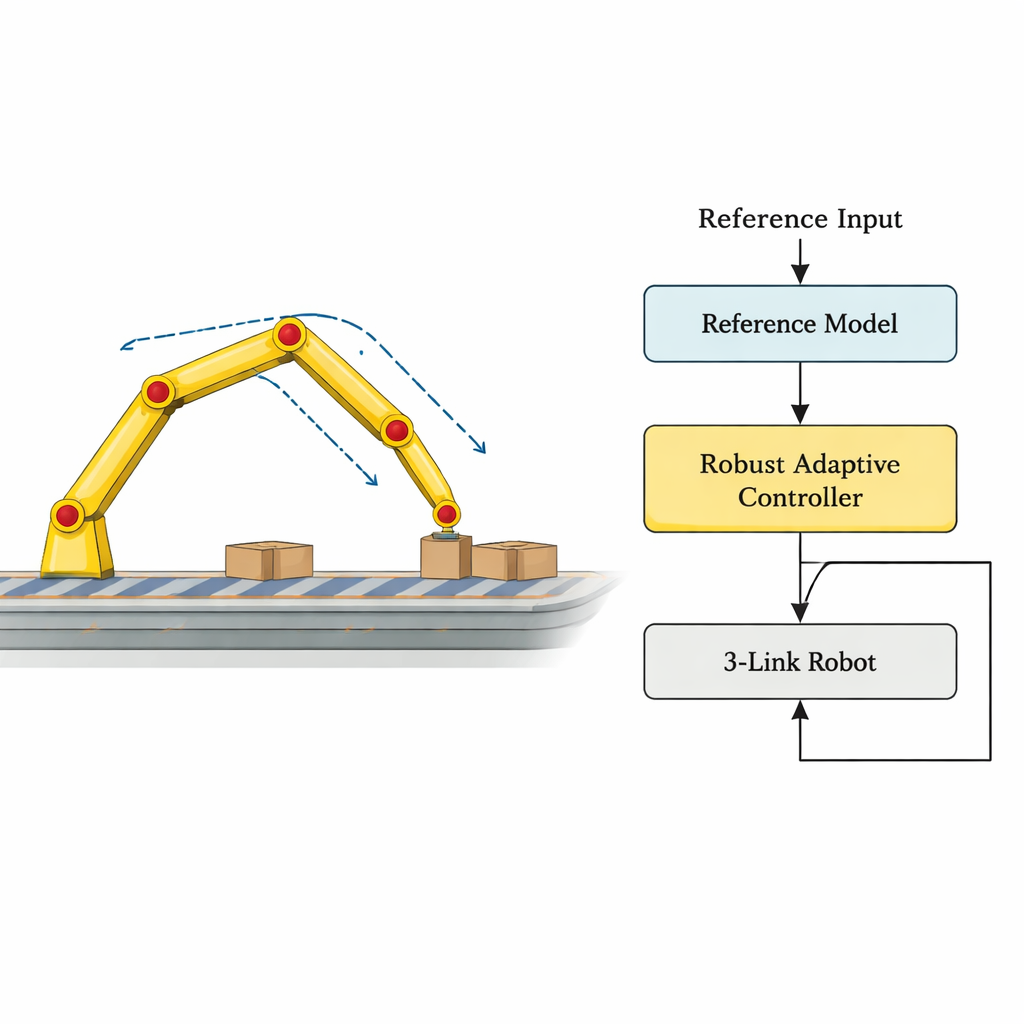
Nauka podążania za poruszającym się celem
Na bazie tego uproszczonego modelu autorzy konstruują adaptacyjny regulator referencyjny modelu (MRAC). Mówiąc prościej, najpierw definiują idealną odpowiedź — model odniesienia, który określa, jak każdy przegub powinien się poruszać w czasie po wydaniu polecenia. Regulator ciągle porównuje rzeczywisty ruch robota z tym ideałem i w czasie rzeczywistym koryguje wewnętrzne wzmocnienia, aby zmniejszyć różnicę. W idealnych warunkach konwencjonalny MRAC może zmusić robota do ścisłego podążania za modelem odniesienia, ale ma poważną słabość: w obecności trwałych zakłóceń lub błędów modelowania adaptacyjne wzmocnienia mogą dryfować do skrajnych wartości, prowadząc do oscylacji, marnotrawstwa energii, a nawet utraty stabilności. Zjawisko to, zwane dryfem parametrów, czyni zwykły MRAC ryzykownym do użycia w przemyśle.
Uczynienie adaptacji odporną, nie lekkomyślną
Aby uniknąć tego dryfu, artykuł rozwija kilka „odpornych” wariantów MRAC, które wprost uwzględniają nieznane efekty. Autorzy dodają dodatkowe składniki do praw adaptacji, które łagodnie przyciągają wzmocnienia regulatora z powrotem w bezpieczne granice lub skalują wysiłek adaptacji w zależności od wielkości błędu śledzenia. Spośród testowanych strategii — znanych jako modyfikacja sigma, modyfikacja błędu i modyfikacja optymalna świadoma energii — to ostatnie wyróżnia się najlepiej. Poprzez obszerne symulacje komputerowe, obejmujące szybkie oscylacyjne ścieżki, ruchy przenoszenia, zmiany masy o 50 procent, nagłe dodanie ładunku i silne zakłócenia o wysokiej częstotliwości, odporny MRAC utrzymuje mały błąd śledzenia i płynne sygnały sterujące. W scenariuszach, gdzie wewnętrzne wzmocnienia konwencjonalnego MRAC rosną bez ograniczeń, odporne wersje utrzymują je w zachowaniu stabilnym, a ruch ramienia pozostaje stabilny. 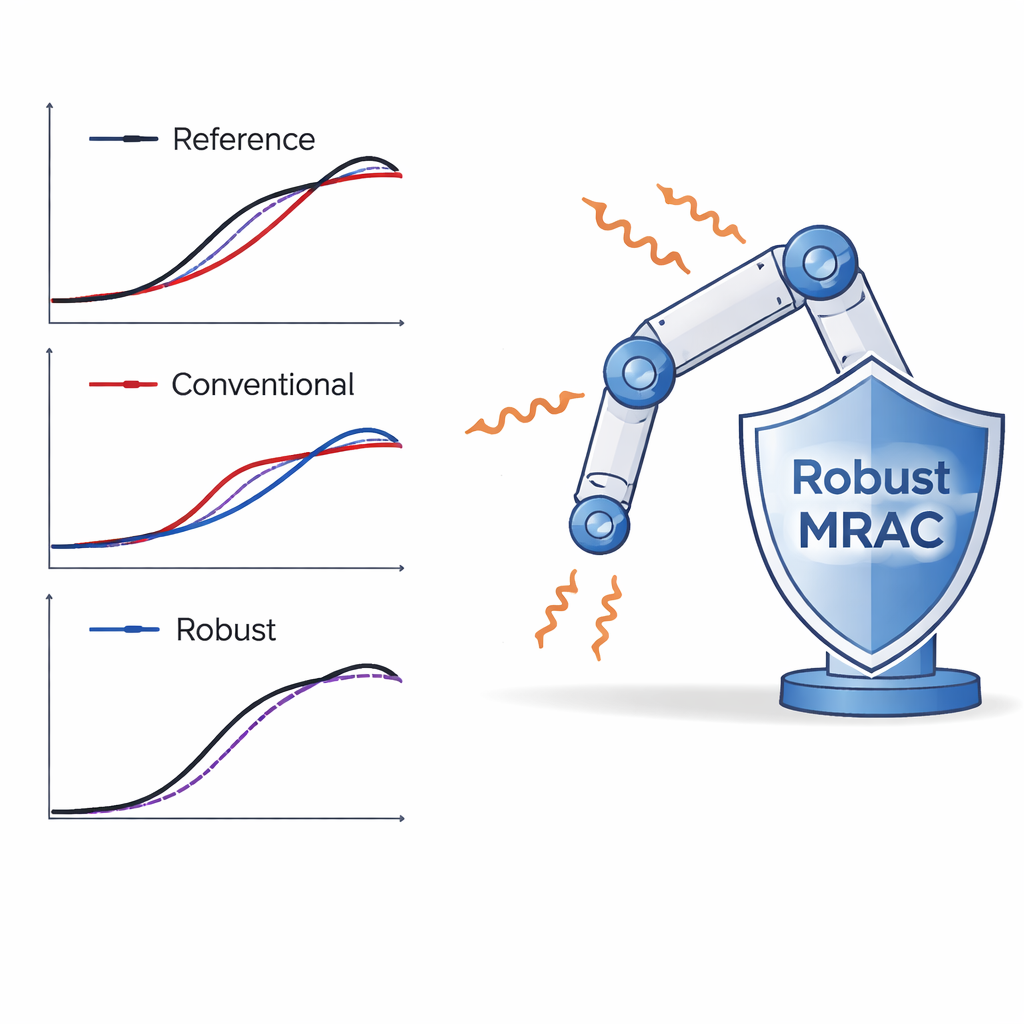
Co to oznacza dla robotów w praktyce
Dla czytelnika niebędącego specjalistą wniosek jest taki, że praca ta oferuje sprytniejszy „autopilot” dla przemysłowych ramion robotycznych — taki, który dalej uczy się i adaptuje, ale nie staje się niestabilny, gdy środowisko lub ładunek się zmienia. Dzięki rozbiciu złożonej dynamiki trzech przegubów na prostsze elementy i dodaniu zabezpieczeń do procesu uczenia, proponowany odporny regulator adaptacyjny pozwala robotowi dokładnie podążać żądanymi ścieżkami przy rozsądnym zużyciu mocy silników, nawet w obliczu zakłóceń i niepewności. To przybliża praktyczną robotykę o krok do prawdziwie „podłącz i działaj” systemów, które można szybko przeprogramować, które radzą sobie z nieoczekiwanymi warunkami i bezpiecznie współpracują z ludźmi bez ciągłego strojenia przez ekspertów.
Cytowanie: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Słowa kluczowe: sterowanie manipulatorem robotycznym, sterowanie adaptacyjne, robotyka przemysłowa, śledzenie trajektorii, sterowanie odporne