Clear Sky Science · pl
Inteligentny, bioinspirowany, wielokryterialny i skalowalny algorytm grupowania wspomagany przez UAV w latających sieciach ad hoc
Sprytniejsze roje dronów na niebie
Wyobraźcie sobie floty dronów współpracujących przy poszukiwaniach ocalałych po trzęsieniu ziemi, monitorowaniu pożarów czy nadzorowaniu upraw. Aby robić to efektywnie, setki latających robotów muszą szybko komunikować się między sobą, nie rozładowując przy tym baterii. W artykule badane jest, jak zorganizować takie „roje dronów”, aby utrzymywały łączność, reagowały szybko i pozostawały dłużej w powietrzu, zapożyczając pomysły z nieoczekiwanego źródła: zachowań łowieckich sępnika.
Dlaczego latające sieci trudno ujarzmić
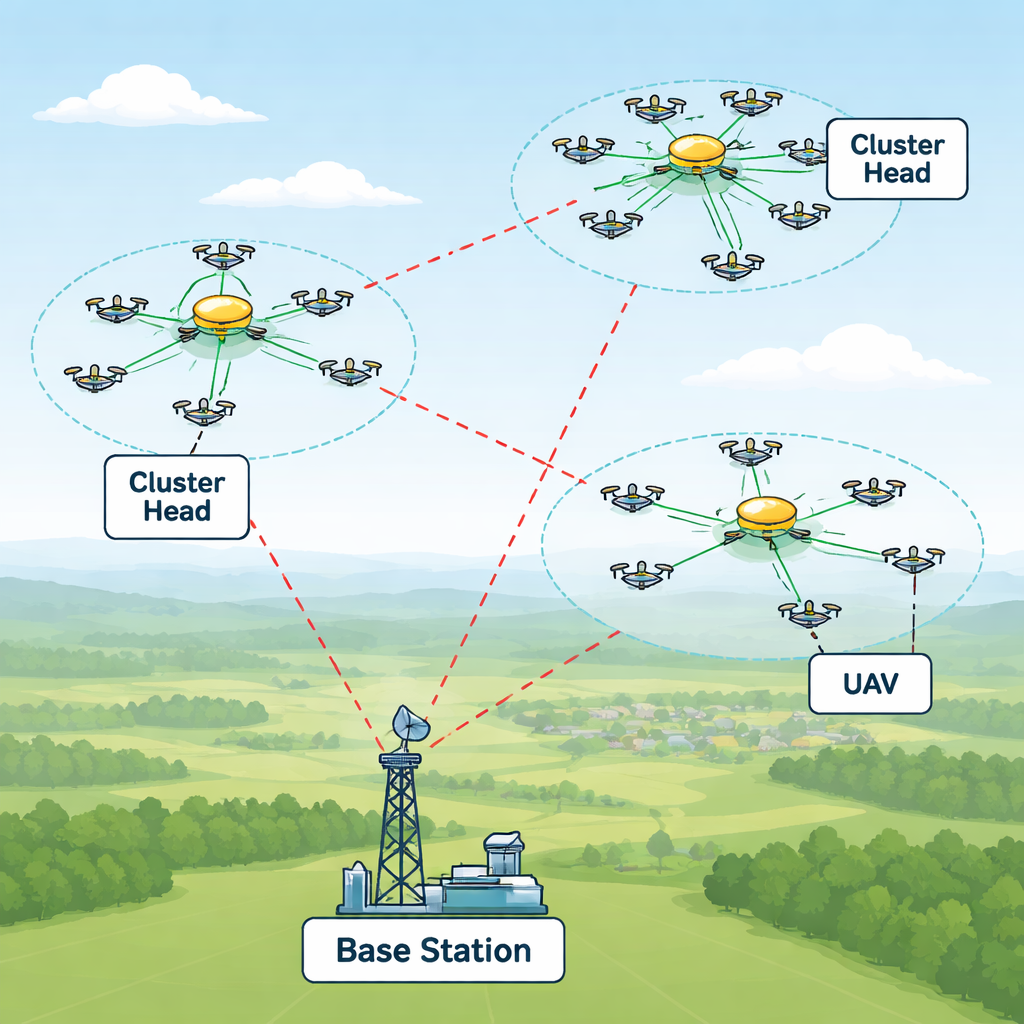
Współczesne drony mogą tworzyć to, co inżynierowie nazywają latającymi sieciami ad hoc, czyli FANET — bezprzewodowe sieci istniejące wyłącznie w powietrzu. W przeciwieństwie do sieci naziemnych drony poruszają się w trzech wymiarach, szybko zmieniają kierunek i są zależne od ograniczonej energii akumulatorów. Gdyby każdy dron próbował komunikować się bezpośrednio z każdym innym, sygnały kolidowałyby, opóźnienia rosłyby, a baterie szybko by się rozładowały. Popularnym rozwiązaniem jest tworzenie klastrów: małych grup dronów z „głową klastra”, która koordynuje lokalną wymianę wiadomości i komunikuje się z innymi głowami. Jednak wybór, które drony powinny zostać liderami i kiedy przetasowywać role w miarę ruchu roju, to ciągle zmienne i trudne zadanie.
Zapożyczając sztuczki od drapieżnego ptaka
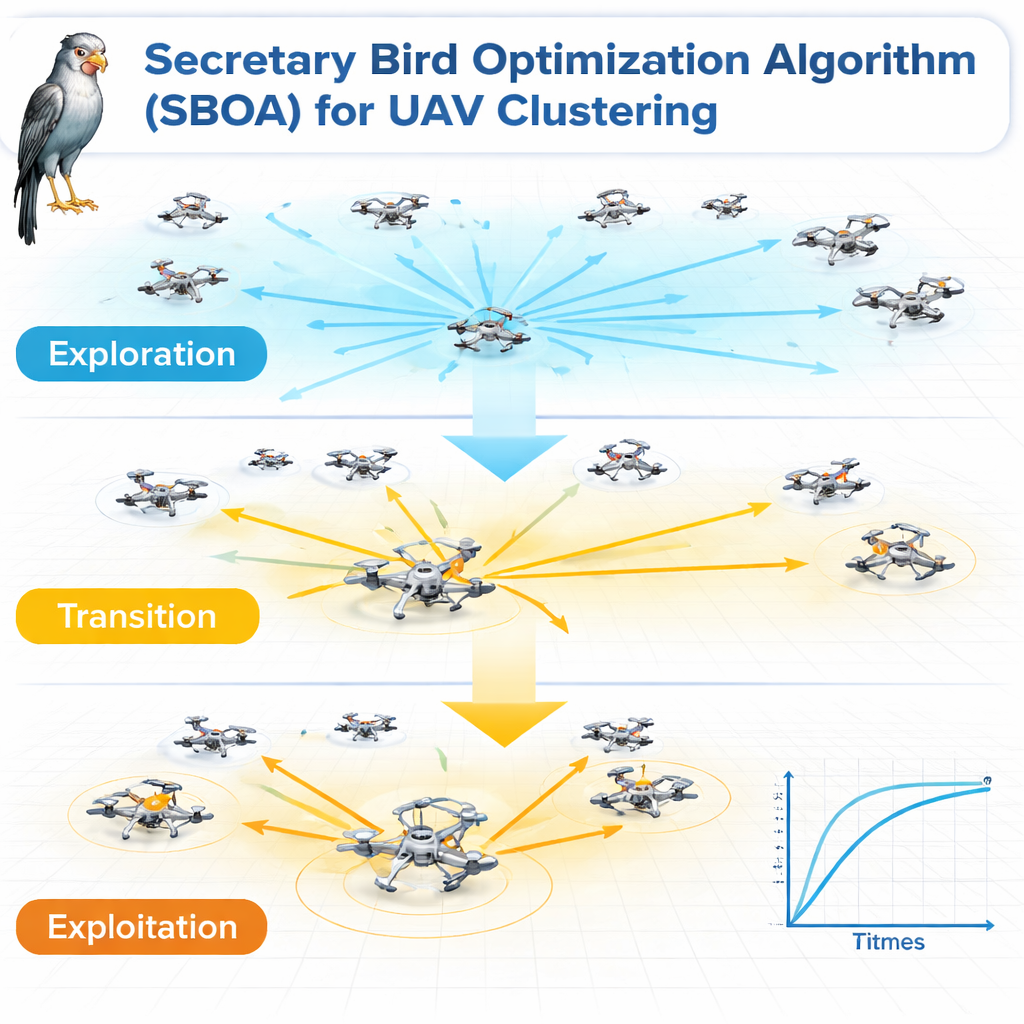
Autorzy sięgają po bioinspirowaną metodę nazwaną Algorytmem Optymalizacji na Bazie Sępnika (SBOA). Sępniki słyną z przeszukiwania szerokich obszarów, a następnie zbliżania się i precyzyjnego ataku na ofiarę serią kopnięć. SBOA odwzorowuje ten wzorzec w oprogramowaniu. Zaczyna od eksploracji wielu możliwych przypisań głów klastrów w roju dronów, a następnie stopniowo koncentruje się na najbardziej obiecujących rozwiązaniach. Na każdym etapie zadaje trzy pytania: Czy drony w każdym klastrze są wystarczająco blisko siebie? Czy wybrani liderzy mają jeszcze wystarczającą energię? I czy obciążenie jest rozłożone sprawiedliwie, by żaden lider nie był przeciążony podczas gdy inni stoją bezczynnie? Traktując to jako problem wielokryterialny, algorytm równocześnie bilansuje odległość, zużycie energii i sprawiedliwość.
Testowanie rojów dronów w wirtualnych światach
Aby sprawdzić, czy ta ptasia strategia pomaga, zespół zbudował szczegółowe symulacje komputerowe. Umieszczono od 30 do 160 dronów w trójwymiarowych wirtualnych przestrzeniach o różnych rozmiarach — od jednego kilometra kwadratowego aż po rozległe pole 15 na 15 kilometrów — i pozwolono im latać według prostego modelu ruchu. Zasięg komunikacji zmieniano od 100 do 900 metrów. W każdym scenariuszu SBOA konkurował z trzema zaawansowanymi alternatywami, które również naśladują zachowania naturalne: Fire Hawk Optimization (FHOA), Portia Spider Optimization (PSOA) oraz wielokryterialną metodą opartą na zapłodnieniu plemnikowym (MOSFP). Badacze śledzili liczbę powstających klastrów, jak szybko pojawiała się stabilna struktura, jak równomiernie rozdzielane były obowiązki liderów oraz jaką „wartość przystosowania” osiągały rozwiązania, łącząc odległość, zużycie energii i balans w jednym wyniku.
Co ujawniły symulacje
W niemal wszystkich testach SBOA okazał się lepszy. Regularnie osiągał do 15% wyższe wyniki przystosowania niż rywale, przy około 10% wydajniejszym grupowaniu i mniej więcej 40% lepszym wyrównaniu obciążenia wśród liderów. W eksperymentach czasowych podejście oparte na sępniku osiągało stabilny wzorzec klastrów w mniejszej liczbie klatek symulacji, szczególnie wraz ze wzrostem liczby dronów. Nawet w rzadkich, dużych obszarach 3D, gdzie drony są daleko od siebie, SBOA utrzymywał ponad 85% najlepszego możliwego wyniku przystosowania, co wskazuje na zdolność adaptacji zarówno do gęstych rojów, jak i rozproszonych formacji. Narzędzia wizualne, takie jak wykresy powierzchni, mapy t-SNE i wykresy violin potwierdziły, że SBOA generował ciaśniejsze, bardziej wyraźne klastry z mniejszą zmiennością obciążenia liderów niż inne metody.
Od symulacji do rzeczywistych misji
Badanie konkluduje, że strategia inspirowana sępnikiem stanowi silny przepis na zarządzanie rojami dronów: utrzymuje drony w efektywnych grupach, sprawiedliwie rozdziela pracę między liderami i płynnie reaguje na zmieniające się warunki. Dla czytelnika nietechnicznego oznacza to, że przyszłe floty dronów ratunkowych, rolniczych czy monitorujących mogłyby dłużej utrzymywać łączność, marnować mniej baterii i reagować bardziej niezawodnie, po prostu lepiej się organizując. Autorzy zauważają, że czynniki rzeczywiste — jak porywy wiatru, błędy GPS czy zakłócenia radiowe — wymagają dalszych testów i proponują dodanie predykcji ruchu opartej na uczeniu oraz inteligentniejszego routingu. Jednak jako krok w stronę odpornych sieci powietrznych, SBOA pokazuje, że obserwacja, jak natura poluje na sawannie, może pomóc uczynić nasze robotyczne pomocniki znacznie bardziej zdolnymi w powietrzu.
Cytowanie: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Słowa kluczowe: roje dronów, komunikacja bezprzewodowa, algorytmy bioinspirowane, energooszczędne sieciowanie, latające sieci ad hoc