Clear Sky Science · pl
Metoda długodystansowej kalibracji zewnętrznej LiDAR–kamera dla transportu kolejowego
Zapewnianie bezpieczeństwa pociągów z daleka
Nowoczesne pociągi bez maszynisty polegają na elektronicznych „oczach”, które obserwują tory w poszukiwaniu przeszkód na długo zanim człowiek mógłby je dostrzec. Dwa z najważniejszych takich „oczu” to kamery i skanery laserowe zwane LiDARami, które postrzegają świat na różne sposoby. Aby współpracowały, muszą być bardzo precyzyjnie wyrównane — zadanie staje się zaskakująco trudne, gdy obserwują tory setki metrów dalej. W badaniu przedstawiono nowy sposób wyrównania tych czujników, dzięki któremu mogą niezawodnie chronić systemy kolejowe na dużym dystansie.
Dlaczego wyrównanie czujników ma znaczenie
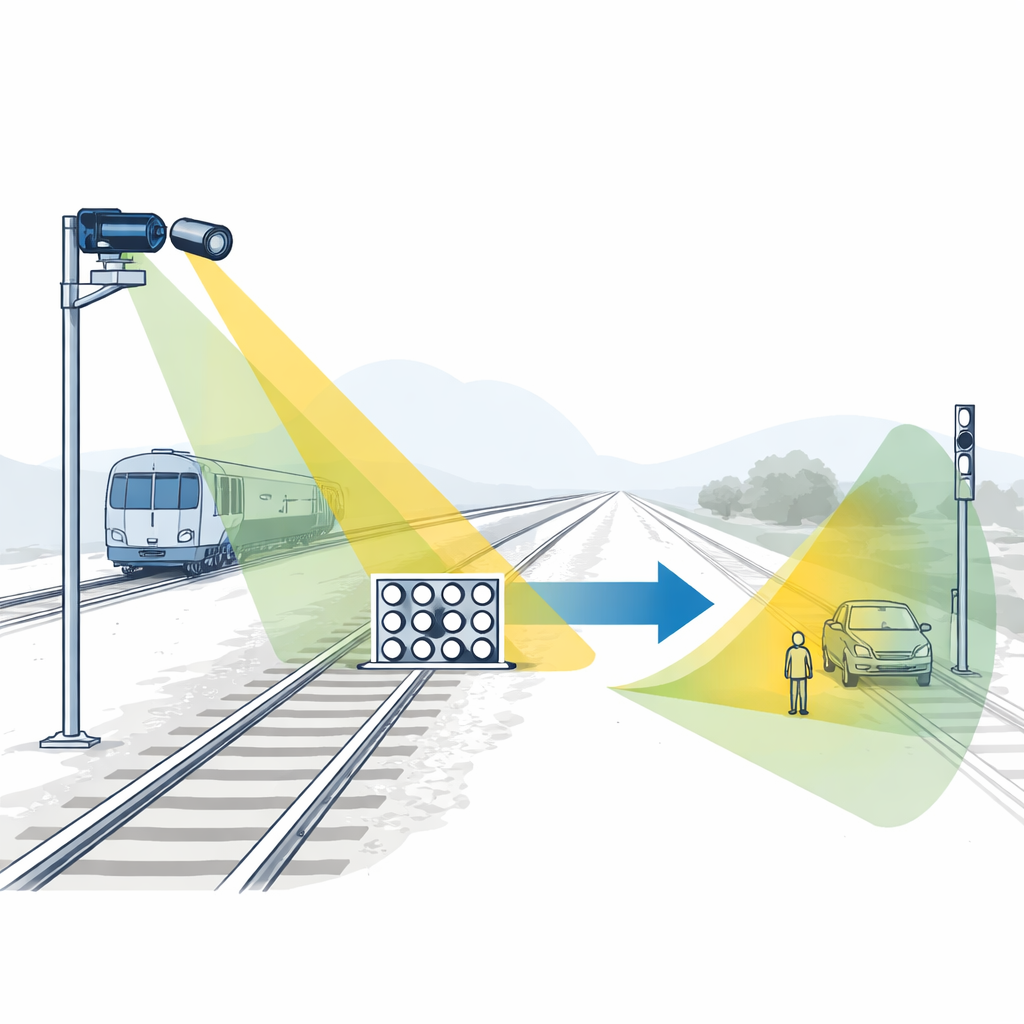
W pociągu autonomicznym kamery rejestrują szczegółowe obrazy w kolorze, podczas gdy LiDAR mierzy odległość, wysyłając impulsy światła i mierząc czas ich powrotu. Połączenie tych dwóch widoków pozwala systemowi wykrywać i śledzić obiekty, które mogą wkraczać na obszar toru — od zatrzymanego samochodu na przejeździe po gruz na szynach. Jednak fuzja działa tylko wtedy, gdy system dokładnie zna położenie kamery względem LiDARa. Nawet niewielkie przesunięcie może przesunąć pozycję wykrytej przeszkody o wiele centymetrów, a na dużych odległościach nawet metrów, co może spowolnić lub obniżyć niezawodność automatycznych systemów ochrony.
Trudność obserwacji dalekiej części toru
W zastosowaniach kolejowych inżynierowie często stosują obiektywy o długiej ogniskowej, aby kamera mogła wyraźnie widzieć obiekty setki metrów dalej. Na takich dystansach powroty LiDARa od jakiegoś celu kalibracyjnego stają się jednak bardzo rozrzedzone: tylko kilka punktów laserowych trafia na płytę używaną do wyrównania czujników. Większość istniejących technik wyrównania zakłada gęstą chmurę punktów LiDAR lub bogate krawędzie w scenie — warunki, które po prostu nie zachodzą na długim dystansie. W rezultacie trudno jest znaleźć dopasowujące się cechy między obrazem 2D a chmurą punktów 3D z wystarczającą dokładnością, by wspierać bezpieczne sterowanie pociągiem.
Inteligentniejsza płyta kalibracyjna
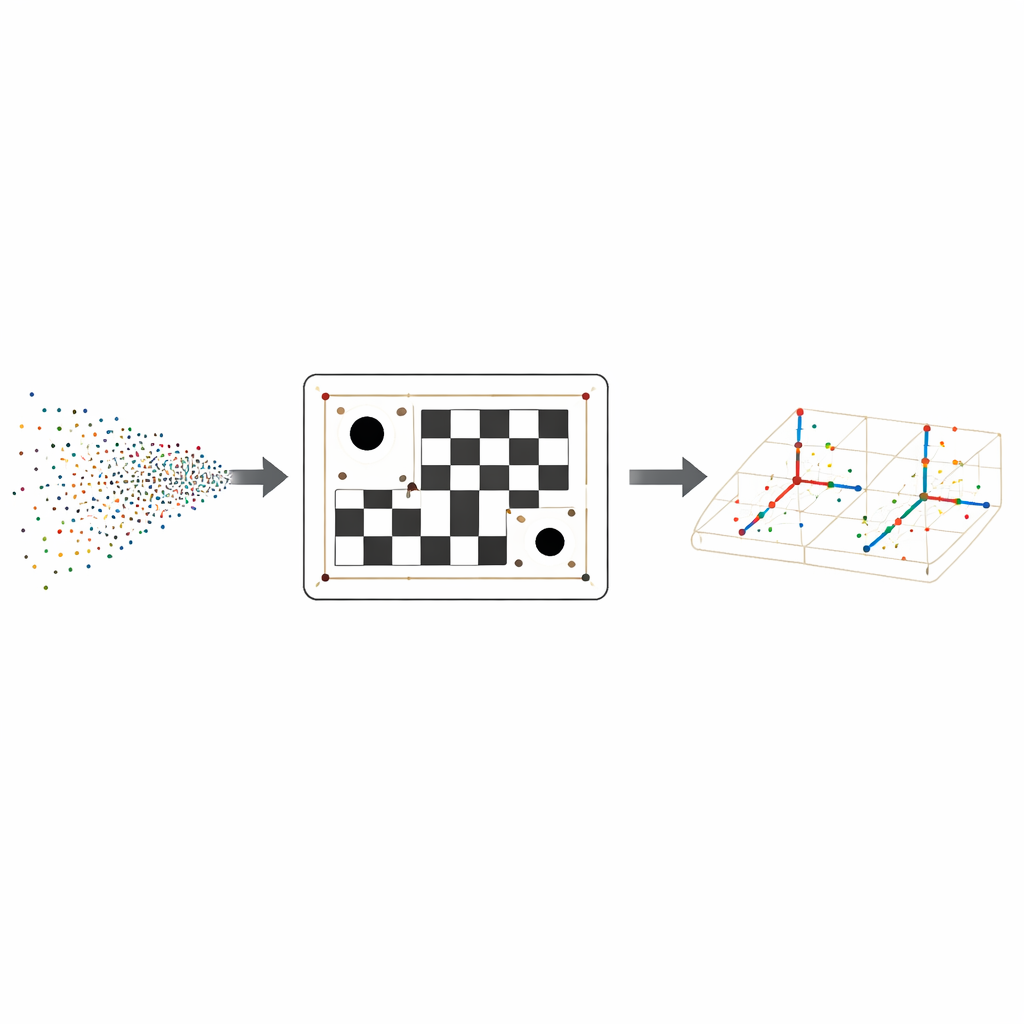
Aby rozwiązać ten problem, autorzy zaprojektowali specjalną płytę kalibracyjną łączącą znany czarno‑biały wzór szachownicy z trzema okrągłymi otworami, których środki tworzą nieregularny trójkąt. Wzór szachownicy dostarcza wielu precyzyjnych narożników w obrazie kamery, podczas gdy otwory tworzą silne wskazówki geometryczne dla LiDARa, który nawet z daleka łatwo wykrywa ich zaokrąglone krawędzie. Ponieważ trzy otwory umieszczono w asymetrycznym trójkącie, orientację płyty w przestrzeni można określić jednoznacznie, unikając pomyłek związanych z odbiciami lustrzanymi lub obrotami widoku.
Przekształcanie rozrzuconych punktów w wiarygodne dopasowania
Po stronie LiDAR metoda najpierw oczyszcza chmurę punktów i dopasowuje płaszczyznę reprezentującą płytę. Następnie projektuje punkty na tę płaszczyznę i stosuje odporną procedurę dopasowania okręgów, aby znaleźć środek każdego otworu, doprecyzowując ich położenia przez wymuszanie znanych odległości fizycznych między otworami. Po ustaleniu trójkąta środków otworów algorytm buduje lokalną siatkę współrzędnych na płycie, przewiduje, gdzie w 3D powinien leżeć każdy narożnik szachownicy, i sprawdza pobliskie punkty LiDAR pod kątem odpowiednich wartości jasności, czyli współczynnika odbicia. To połączenie geometrii i informacji o refleksyjności zamienia garstkę rozrzuconych zwrotów w niezawodny zbiór lokalizacji narożników 3D, które odpowiadają narożnikom 2D z kamery.
Precyzyjne dopasowanie relacji między czujnikami
Gdy te same fizyczne narożniki zostaną zidentyfikowane zarówno na obrazie kamery, jak i w chmurze LiDAR, autorzy rozwiązują dokładną rotację i translację łączącą oba czujniki. Używają iteracyjnej techniki optymalizacji, która wielokrotnie koryguje to powiązanie, aby zmniejszyć różnicę między miejscem, w którym punkty LiDAR rzutują się na obraz, a miejscem, w którym kamera faktycznie widzi narożniki. Testy na rzeczywistej platformie kolejowej, z użyciem różnych obiektywów od umiarkowanych po silne teleobiektywy, pokazują, że nowa metoda konsekwentnie utrzymuje błąd rzutowania na poziomie około jednego piksela lub mniej, i przewyższa kilka znanych alternatyw, szczególnie przy najdłuższych ogniskowych, gdzie danych jest najmniej.
Co to oznacza dla bezpieczeństwa kolejowego
Mówiąc prościej, badanie oferuje bardziej niezawodny sposób powiedzenia kamerze i LiDARowi w pociągu autonomicznym: „jesteś tutaj i patrzysz dokładnie w tym kierunku”. Poprzez przeprojektowanie płyty kalibracyjnej i dodanie inteligentnego przetwarzania rozrzedzonych danych LiDAR, metoda zachowuje wysoką dokładność nawet wtedy, gdy czujniki obserwują sceny setki metrów dalej. Bardziej ścisłe wyrównanie pozwala systemowi fuzji precyzyjniej umieszczać przeszkody w przestrzeni 3D, wzmacniając tym samym technologiczne podstawy bezpieczniejszego transportu kolejowego i bardziej wiarygodnej percepcji multisensorowej w warunkach rzeczywistych.
Cytowanie: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Słowa kluczowe: bezpieczeństwo transportu kolejowego, fuzja LiDAR i kamery, kalibracja czujników, pociągi autonomiczne, percepcja dalekiego zasięgu