Clear Sky Science · pl
Rekonstrukcja 3D płytkich struktur morskich z użyciem bezpośredniej kalibracji systemu i ekstrakcji słabej linii laserowej
Ujawnianie ukrytych podwodnych światów
Wiele najciekawszych śladów naszej przeszłości leży dziś pod wodą — wraki statków, zalane miasta i przybrzeżne ruiny. Aby cyfrowo badać i zachowywać te miejsca, badacze potrzebują dokładnych map 3D tego, co zalega na dnie. Tymczasem w płytkich wodach jasne światło słoneczne, unoszący się piasek i sama woda utrudniają precyzyjne pomiary. W artykule opisano nowy sposób skanowania i rekonstrukcji szczegółowych modeli 3D struktur podwodnych z użyciem niskomocowego niebieskiego lasera — nawet w nasłonecznionych, zaszumionych warunkach, w których dotychczasowe metody zwykle zawodzą.
Dlaczego skanowanie płytkich mórz jest tak trudne
Tworzenie cyfrowego modelu 3D sceny zwykle oznacza złożenie milionów punktów w przestrzeni — tzw. chmury punktów. Na lądzie lasery i kamery robią to niezawodnie. Pod wodą jednak wszystko się komplikuje. Woda załamuje i rozprasza światło, nadając scenom niebiesko-zieloną mgiełkę i zacierając krawędzie. Światło słoneczne przepływające przez fale tworzy jasne, ruchome wzory zwane kaustykami, które mogą zagłuszyć cienką linię słabego lasera. Mikroskopijne cząstki tworzą zasłonę mgły i migotające odbicia. W rezultacie wiele istniejących systemów działa tylko nocą, przy bardzo niskim oświetleniu lub w ściśle kontrolowanych warunkach — a tak nie zachowują się prawdziwe oceany.
Obracający się niebieski laser jako pędzel 3D
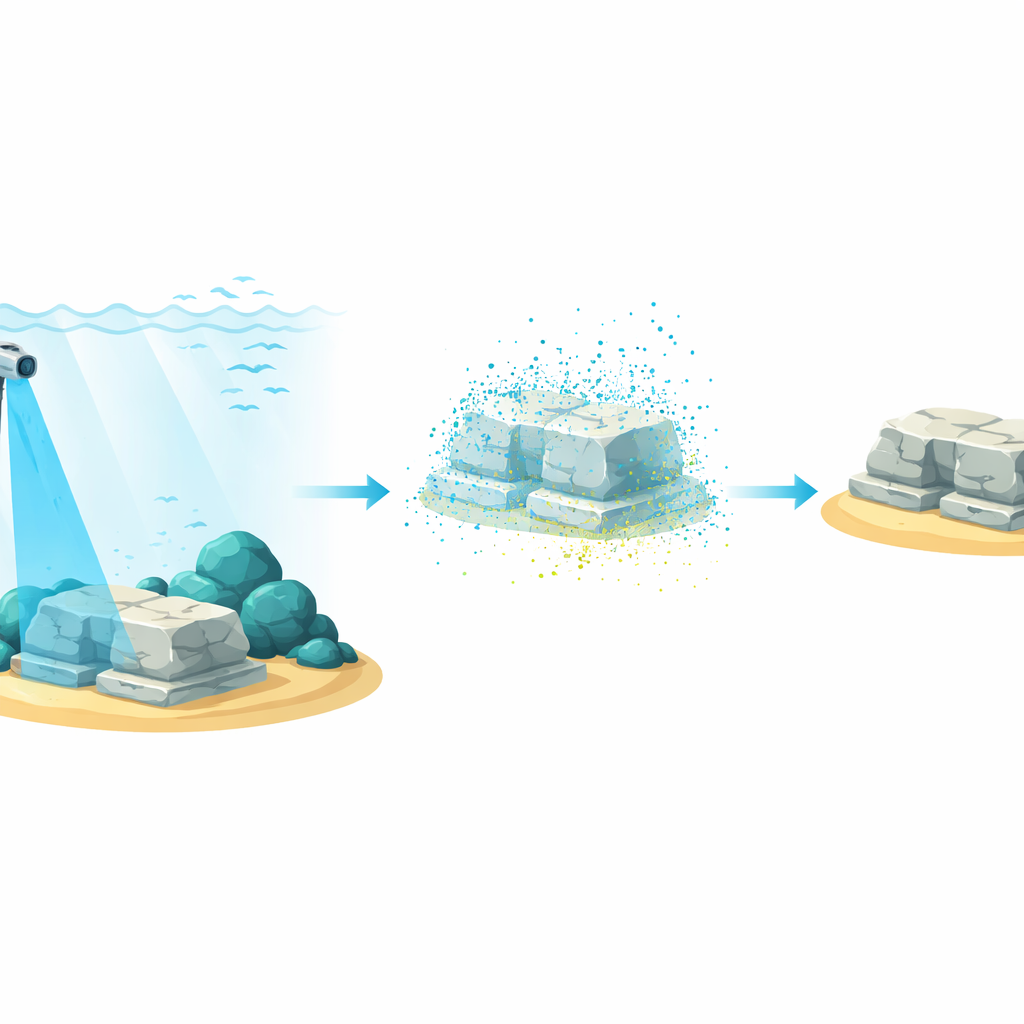
Autorzy zbudowali kompaktowy, wodoodporny skaner działający jak pędzel 3D. Rzuca cienką, pionową płaszczyznę niebieskiego lasera, która zamiata przestrzeń, gdy ramię urządzenia powoli się obraca. Tam, gdzie ta płaszczyzna trafia w skałę, ścianę lub artefakt, rysuje świecącą krzywą. Kamera zamontowana obok lasera rejestruje obrazy przy każdym małym kroku obrotu. Łącząc te widoki, system rekonstruuje gęstą chmurę punktów 3D otoczenia, z przybliżonymi kolorami, którą później można przekształcić w siatkę powierzchniową do wizualizacji lub rzeczywistości wirtualnej.
Nauczanie systemu, gdzie każdy piksel leży w przestrzeni
Kluczowym wyzwaniem w takich systemach jest kalibracja: ustalenie, jak każdy piksel kamery odpowiada współrzędnym w świecie rzeczywistym. Tradycyjne podejścia opierają się na szczegółowych modelach matematycznych kamery i wody z dziesiątkami parametrów do dopasowania, co czyni je kruchymi i podatnymi na błędy. Tutaj badacze wybrali podejście oparte na danych. Bezpośrednio uczą odwzorowania pikseli obrazu na pozycje 3D, skanując ścianę pokrytą znaną siatką. Potrzeba tylko kilkuset starannie dobranych punktów próbkowania. Po zapisaniu w tablicy odniesienia, ta mapa pozwala skanerowi przekształcać dowolny wykryty piksel lasera w punkt 3D bez jawnego rozwiązywania skomplikowanych równań kamery.
Prostowanie i wzmacnianie słabego niebieskiego śladu
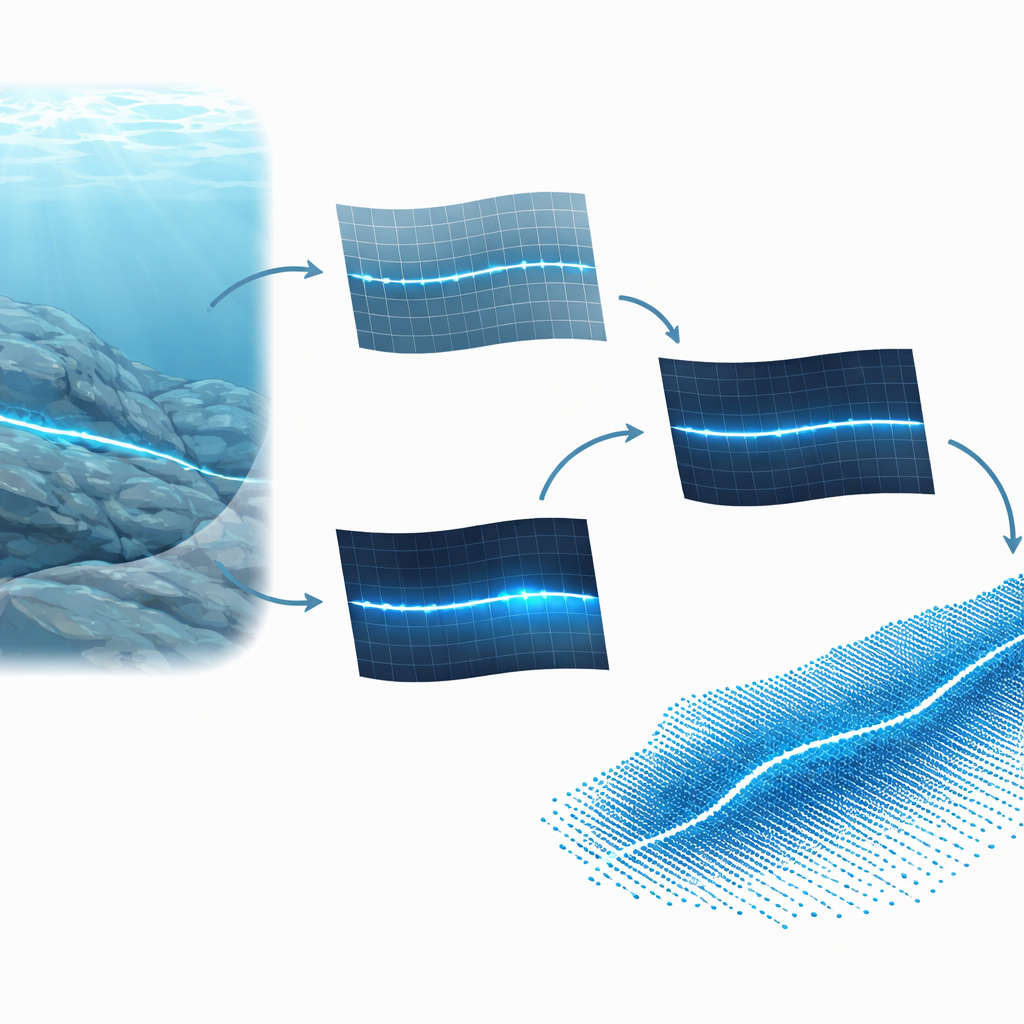
Ponieważ kalibracja wykonana jest w powietrzu, materiał nagrany pod wodą trzeba najpierw „wyprostować”, aby cofnąć zniekształcenia spowodowane załamaniem na powierzchni wody. Zespół mierzy to zniekształcenie przy użyciu obrazów siatki sięgającej przez granicę powietrze-woda, a następnie oblicza, jak każdy piksel podwodny przesunąłby się, gdyby był widziany w powietrzu. Po tym odkształceniu zaczyna się prawdziwy trik: odnalezienie słabej, często przerwanej niebieskiej linii w zaszumionym obrazie. Metoda najpierw oblicza dla każdego piksela wartość „niebieskości”, dostrojoną tak, by światło bliskie barwie lasera wyróżniało się. Następnie porównuje, o ile dany piksel jest bardziej niebieski od sąsiadów i używa klasyfikatora uczenia maszynowego, by utworzyć szorstką mapę czarno-białą prawdopodobnych pikseli lasera.
Z zaszumionych kropek do czystych kształtów 3D
Ta pierwsza mapa nadal zawiera wiele fałszywych trafień spowodowanych piaskiem, refleksami i kaustykami. Aby je oczyścić, system wyszukuje wzorców prostych linii, używając klasycznej techniki głosującej za możliwymi liniami na podstawie pozycji pikseli. Zachowuje tylko te linie, które pasują do oczekiwanej orientacji lasera. Przez pozostałe punkty dopasowywana jest gładka krzywa, a „pewność” każdego piksela rośnie, jeśli leży blisko tej krzywej i ma silną niebieskość. Dla każdego rzędu obrazu wybierany jest piksel o najwyższej pewności jako część końcowego śladu lasera. Podając te oczyszczone ślady, krok po kroku, do tabeli kalibracyjnej, system generuje chmurę punktów 3D pokolorowaną z oryginalnego obrazu kamery.
Jak dobrze to działa w prawdziwej wodzie?
Autorzy przetestowali swój system w akwariach i w płytkim morzu na około pięciu metrach głębokości, przy oświetleniu od słabego poziomu wewnętrznego po intensywne światło południowe rzędu dziesiątek tysięcy luksów. Skanowali obiekty o precyzyjnie znanych wymiarach — kulę i specjalny kształt akrylowy — i porównywali zmierzone rozmiary z rzeczywistymi. Na odległościach do około pół metra typowy błąd utrzymywał się poniżej ułamka milimetra nawet przy jasnym świetle, a przy większych odległościach pozostawał w granicach kilku dziesiątych milimetra, aż do momentu, gdy linia lasera stawała się niemal niewidoczna dla oka. Istniejące metody przeznaczone na ciemne warunki nie były w stanie zrekonstruować scen przy tych wyższych poziomach oświetlenia wcale.
Co to oznacza dla eksploracji miejsc podwodnych
W istocie praca ta pokazuje, że dokładne mapowanie 3D płytkich struktur podwodnych nie wymaga masywnych wysokomocowych laserów ani idealnie kontrolowanej ciemności. Poprzez staranne korekty załamania światła w wodzie, podkreślanie koloru lasera i zastosowanie bezpośredniej kalibracji wiążącej piksele z pozycjami w świecie rzeczywistym, system potrafi wiarygodnie wyodrębnić słaby niebieski ślad z zaszumionych, nasłonecznionych scen. Choć wydajność spada przy ekstremalnie silnym świetle i na pewnych kolorach obiektów, podejście otwiera możliwość bardziej rutynowego, niskokosztowego skanowania raf, murów portowych i zatopionych ruin, pomagając naukowcom i konserwatorom tworzyć wierne cyfrowe kopie podwodnych światów.
Cytowanie: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Słowa kluczowe: podwodne skanowanie 3D, rekonstrukcja linii laserowej, mapowanie płytkich wód, obrazowanie chmury punktów, archeologia podwodna